LUẬN VĂN THẠC SĨ Nghiên cứu, thiết kế, chế tạo thử nghiệm robot kiểm tra độ mòn bồn chứa xăng dầu
NỘI DUNG ĐỒ ÁN
TÓM TẮT
Ngành công nghiệp dầu khí nước ta ngày càng phát triển kéo theo đó là các công trình xây dựng bồn bể chứa ngày càng nhiều. Do đó chất lượng bồn chứa được đặt lên hàng đầu. Trong khi đó, các khuyết tật ảnh hưởng đến chất lượng bồn chứa chủ yếu là khuyết tật hàn do quá trình chế tạo và khuyết tật ăn mòn do tác động của môi trường bên trong và bên ngoài bồn chứa. Vì vậy, việc kiểm tra đánh giá chất lượng bồn bể chứa định kỳ để kịp thời sửa chửa trở nên rất cấp thiết.
Có nhiều phương pháp kiểm tra độ ăn mòn như phương pháp kiểm tra phá hủy và phương pháp kiểm tra không phá hủy. Phương pháp siêu âm tổ hợp pha là một trong những phương pháp kiểm tra không phá hủy đạt độ chính xác và năng suất cao. Ở nước ta hiện nay chưa có thiết bị mang đầu dò siêu âm tổ hợp pha để kiểm tra độ mòn thân bồn chứa, trong khi đó nhập khẩu thiết bị kiểm tra siêu âm này với chi phí cao và không làm chủ được công nghệ. Do vậy, việc chế tạo robot mang đầu dò siêu âm tổ hợp pha để kiểm tra và đánh giá chất lượng bồn bể có ý nghĩa rất to lớn và cấp thiết. Chính vì vậy, đề tài đã tiến hành khảo sát các loại thiết bị, các loại robot, phương pháp và kỹ thuật đo bằng siêu âm để từ đó tiến hành nghiên cứu, thiết kế và chế tạo thử nghiệm robot kiểm tra mòn bồn chứa nhằm đáp ứng nhu cầu xã hội.
SUMMARY
That oil and gas industry of Vietnam has increasingly developed leads on more and more tanks construction. Therefore the quality of tanks is placed on top. Among its main defects of tanks, welding which is made from production procedure and erosion which is caused by inner and outer environment of tanks are primarily ones. The periodically assessment of quality tanks for timely repair becomes urgent, then.
There are many methods to test the corrosion level of a tank such as destructive and non-destructive inspection method. Combined phase ultrasonic method is the non- destructive inspection measure with high accuracy and productivity. In our country, there’s no equipment having combined phase ultrasonic to inspect the erosive level of tanks. On the other hand, importing this equipment is impossible since its cost is high, and the technology cannot be controlled. Therefore, that producing robot that carries combined phase ultrasonic equipment to test and evaluate tank quality is necessary and means a lot. For above reasons, themes group made a survey about this equipment, methods and ultrasonic testing technique to conduct research, design and produce trial version to test erosion level to meet social demands.
MỤC LỤC
Lý lịch khoa học ....................................................................................................................i Lời cam đoan .................................................................................................................... iii Lời cảm ơn......... ..................................................................................................................iv Tóm tắt.................................................................................................................................. v Mục lục.................. .............................................................................................................vii Danh sách các chữ viết tắt ..................................................................................................xii Danh mục hình.................................................................................................................. xiii Danh mục bảng ............................................................................................................... xviii
Chương 1. MỞ ĐẦU........................................................................................................... 1
1.1. Đặt vấn đề ................................................................................................................ 1
1.2. Tính cấp thiết của đề tài .......................................................................................... 1
1.3. Ý nghĩa khoa học và thực tiễn của đề tài ................................................................ 2
1.3.1. Ý nghĩa khoa học của đề tài .................................................................................... 2
1.3.2. Tính thực tiễn của đề tài .......................................................................................... 2
1.4. Mục tiêu nghiên cứu đề tài ...................................................................................... 2
1.5. Đối tượng và phạm vi nghiên cứu ........................................................................... 2
1.5.1. Đối tượng nghiên cứu của đề tài ............................................................................. 2
1.5.2. Phạm vi nghiên cứu của đề tài................................................................................. 3
1.6. Phương pháp nghiên cứu ......................................................................................... 3
1.6.1. Cơ sở phương pháp luận.......................................................................................... 3
1.6.2. Các phương pháp nghiên cứu cụ thể ....................................................................... 3
1.6.2.1. Phương pháp phân tích lý thuyết ............................................................................. 3
1.6.2.2. Phương pháp thực nghiệm....................................................................................... 3
1.7. Kết cấu của luận văn ............................................................................................... 4
Chương 2. TỔNG QUAN................................................................................................... 5
2.1.1.1. Theo hình dáng của bể............................................................................................. 5
2.1.1.2 Theo áp suất làm việc [21] ...................................................................................... 7
2.1.1.3. Theo vật liệu xây dựng [21] ................................................................................... 7
2.1.1.4. Theo chiều cao xây dựng [21] ................................................................................. 7
2.1.2. Kết cấu của bồn ....................................................................................................... 7
2.1.2.1. Thân bồn chứa ......................................................................................................... 8
2.1.2.2. Đáy bồn chứa ........................................................................................................... 9
2.1.2.3. Mái bồn chứa ........................................................................................................... 9
2.1.2.4. Các thiết bị phụ trợ ................................................................................................ 10
2.1.3. Thi công lắp đặt bồn chứa xăng dầu...................................................................... 11
2.1.3.1. Lắp đặt bồn thép dạng tấm phẳng.......................................................................... 11
2.1.3.2. Lắp đặt bồn thép tấm mặt bích .............................................................................. 11
2.1.4. Tình hình xây dựng bể chứa ở nước ta .................................................................. 12
2.2. Khuyết tật ăn mòn ................................................................................................. 15
2.2.1. Định nghĩa ăn mòn. ............................................................................................... 15
2.2.2. Phân loại ăn mòn ................................................................................................... 15
2.2.3. Phân loại mức độ chịu ăn mòn của vật liệu........................................................... 15
2.2.4. Các dạng ăn mòn ................................................................................................... 16
2.2.4.1. Ăn mòn đều ........................................................................................................... 16
2.2.4.2. Ăn mòn cục bộ....................................................................................................... 16
2.2.4.3. Ăn mòn lỗ (ăn mòn điểm - Pitting Corrosion) ...................................................... 17
2.2.4.4. Một số dạng ăn mòn khác...................................................................................... 17
2.3. Kiểm tra mòn ......................................................................................................... 19
2.4. Khuyết tật hàn ....................................................................................................... 21
2.4.1 Định nghĩa ............................................................................................................. 21
2.4.2. Các loại khuyết tật hàn .......................................................................................... 21
2.4.2.1. Nứt .................................................................................................................... 21
2.4.2.2. Rỗ khí .................................................................................................................... 23
2.4.2.3. Ngậm xỉ ................................................................................................................. 24
2.4.2.4. Không ngấu ........................................................................................................... 24
2.4.2.5. Chảy loảng ............................................................................................................. 25
2.5. Các nghiên cứu liên quan đến đề tài...................................................................... 25
2.5.1. Các nghiên cứu ngoài nước ................................................................................... 25
2.5.1.1. Robot MINI Climber của IMC (International Climbing Machines) ..................... 25
2.5.1.2. Robot leo tường của đai học Dalhouse.................................................................. 26
2.5.1.3. Robot ScoRpion B-Scan ........................................................................................ 27
2.5.1.4. Robot RMS2 .......................................................................................................... 28
2.5.1.5. TriPod của công ty Jireh ........................................................................................ 29
2.5.2. Các nghiên cứu trong nước ................................................................................... 30
2.6. Các vấn đề còn tồn tại và định hướng nghiên cứu ................................................ 31
Chương 3. CƠ SỞ LÝ THUYẾT .................................................................................... 32
3.1. Các phương pháp kiểm tra không phá hủy............................................................ 32
3.1.1. Kiểm tra bằng thị giác và quang học ..................................................................... 32
3.1.2. Kiểm tra bằng chất lỏng thẩm thấu (Penetrant Testing - PT) ............................... 33
3.1.3. Phương pháp kiểm tra bằng chụp ảnh bức xạ ....................................................... 34
3.1.4. Kiểm tra bằng bột từ .............................................................................................. 36
3.1.5. Kiểm tra bằng truyền âm ....................................................................................... 37
3.1.6. Phương pháp kiểm tra bằng dòng điện xoáy ......................................................... 38
3.1.7. Kiểm tra bằng siêu âm ........................................................................................... 39
3.1.8. Siêu âm Phased Array (PA)................................................................................... 41
3.1.8.1. Thành phần cơ bản của hệ thống phased array...................................................... 42
3.1.8.2. Đầu dò.................................................................................................................... 43
3.1.8.3. Nêm đầu dò Phased array ...................................................................................... 45
3.1.8.4. Sự hình thành và điều khiển chùm tia ................................................................... 47
3.1.8.5. Quét chùm tia ........................................................................................................ 48
3.1.8.6. Cơ sở hình ảnh phased array ................................................................................. 50
3.1.8.7. Một số thiết bị siêu âm phased array kiểm tra độ mòn.......................................... 53
Chương 4. YÊU CẦU VÀ PHƯƠNG ÁN THIẾT KẾ .................................................. 59
4.1. Phân tích đối tượng thiết kế................................................................................... 59
4.1.1. Thông số thiết kế ................................................................................................... 59
4.1.2. Quỹ đạo chuyển động kiểm tra mòn của robot ..................................................... 61
4.2. Phương án thiết kế ................................................................................................. 65
4.2.1. Đề xuất phương án bám dính ................................................................................ 65
4.2.1.1. Phương án 1 - Giác hút chân không ...................................................................... 65
4.2.1.2. Phương án 2 - Nam châm vĩnh cửu ....................................................................... 66
4.2.1.3. Phương án 3 - Nam châm điện ............................................................................. 67
4.2.1.4. So sánh các phương án và lựa chọn ...................................................................... 68
4.2.2. Đề xuất kết cấu cơ cấu mang đầu dò ..................................................................... 69
4.2.3. Đề xuất kết cấu tổng thể robot kiểm tra mòn ........................................................ 70
4.2.3. Trình tự thực hiện công việc ................................................................................. 71
Chương 5. TÍNH TOÁN VÀ THIẾT KẾ ROBOT........................................................ 73
5.1. Tính toán cơ khí..................................................................................................... 73
5.1.1. Tính toán lực hút nam châm .................................................................................. 73
5.1.2. Chọn nam châm điện ............................................................................................. 76
5.2. Tính toán chọn động cơ ......................................................................................... 77
5.2.1. Tính công suất động cơ ......................................................................................... 77
5.2.2. Tính số vòng quay và momen xoắn cho động cơ .................................................. 77
5.2.3. Tính momen xoắn của trục động cơ ...................................................................... 77
5.3. Phương trình động học của robot .......................................................................... 78
5.4. Thiết kế kết cấu cơ khí .......................................................................................... 82
5.5. Thiết kế bộ điều khiển robot.................................................................................. 83
5.5.1. Sơ đồ khối hệ thống và thuật toán điều khiển robot.............................................. 83
5.5.2. Giới thiệu một số thành phần hệ thống ................................................................. 85
5.5.2.1. KIT thí nghiệm STM32F4 Discovery ................................................................... 85
5.5.2.2. Module RF SI4463 ................................................................................................ 85
5.5.2.3. Driver motor .......................................................................................................... 86
5.5.2.4. Sơ đồ nguyên lý mạch điều khiển ......................................................................... 86
5.6. Tổng hợp các thông số tính toán ........................................................................... 88
Chương 6. CHẾ TẠO, THỬ NGHIỆM VÀ ĐÁNH GIÁ ............................................. 89
6.1. Chế tạo và lắp ráp chi tiết ...................................................................................... 89
6.1.1. Thiết kế và chế tạo mô hình bồn chứa................................................................... 89
6.1.1.1. Thiết kế mô hình bồn chứa .................................................................................... 89
6.1.1.2. Thi công lắp đặt một phần nhỏ bồn chứa .............................................................. 90
6.1.2. Quá trình chế tạo và lắp ráp đối với phương án nam châm vĩnh cữu ................... 93
6.1.2.1. Quá trình chế tạo ................................................................................................... 93
6.1.2.2. Quá trình lắp ráp .................................................................................................... 96
6.1.3. Quá trình chế tạo và lắp ráp đối với phương án nam châm điện........................... 98
6.2. Giao diện điều khiển............................................................................................101
6.3. Thử nghiệm .........................................................................................................104
6.3.1. Thử nghiệm thiết bị .............................................................................................104
Chương 7. KẾT LUẬN VÀ KIẾN NGHỊ.....................................................................106
7.1. Kết luận. ..............................................................................................................106
7.2. Kiến nghị .............................................................................................................106
DANH SÁCH CÁC CHỮ VIẾT TẮT
|
NDT |
Non-Destructive Testing |
Kiểm tra không phá hủy |
|
PA |
Phased Array |
Siêu âm tổ hợp pha |
|
UT |
Ultrasonic testing |
Kiểm tra siêu âm |
|
VT |
Visual Testing |
Kiểm tra bằng thị giác và quang học |
|
RT |
Radiographic testing |
Kiểm tra chụp ảnh bức xạ |
|
ET |
Eddy Current Testing |
Kiểm tra bằng dòng điện xoáy |
|
PT |
Penetrant Testing |
Kiểm tra bằng chất lỏng thẩm thấu |
|
MT |
Magnetic Particle Testing |
Kiểm tra bằng bột từ |
|
AE |
Acoustic Emission Testing |
Kiểm tra bằng truyền âm |
|
LT |
Leak Testing |
Kiểm tra rò rỉ |
DANH SÁCH CÁC HÌNH
Hình 2.1: Bể trụ đứng ........................................................................................................ 5
Hình 2.2: Bể trụ ngang ...................................................................................................... 6
Hình 2.3: Bể chứa xăng dầu tại Nhà máy Lọc dầu số 1 Dung Quất ................................. 6
Hình 2.4: Kết cấu của bồn chứa xăng dầu [11] ................................................................. 7
Hình 2.5: Chi tiết về thân bồn chứa xăng dầu ................................................................... 8
Hình 2.6: Công nhân đang hàn đáy bồn chứa [12]............................................................ 9
Hình 2.7: Mái bồn chứa .................................................................................................... 9
Hình 2.8: Các thiết bị phụ trợ của bồn chứa [18] ............................................................ 10
Hình 2.9: Lắp đặt bồn thép dạng tấm phẳng [13]............................................................ 11
Hình 2.10: Lắp đặt bồn thép tấm mặt bích [13] ................................................................ 12
Hình 2.11: Ba bồn hình cầu thuộc nhà máy lọc dầu Dung Quất [14] ............................... 12
Hình 2.12: Tổng kho xăng dầu Nhà Bè ............................................................................. 13
Hình 2.13: Dự án Mở rộng Kho cảng xăng dầu Chân Mây- Thừa Thiên Huế ................. 13
Hình 2.14: Cụm kho cảng xăng dầu - Tổng Công ty xăng dầu Quân Đội [15] ................ 14
Hình 2.15: Ăn mòn đều [1] ............................................................................................... 16
Hình 2.16: Hư hỏng đường hàn và mài mòn bên trong của thân bồn chứa ...................... 18
Hình 2.17: Mài mòn nền bồn chứa và lớp phủ đường hàn bị bóc ra................................. 18
Hình 2.18: Ăn mòn mái che .............................................................................................. 19
Hình 2.19: Các khuyết tật đưởng hàn ............................................................................... 21
Hình 2.20: Vị trí xuất hiện vết nứt dọc.............................................................................. 22
Hình 2.21: Vị trí xuất hiện vết nứt ngang.......................................................................... 23
Hình 2.22: Khuyết tật rổ khí [17] ..................................................................................... 23
Hình 2.23: Khuyết tật ngậm xỉ .......................................................................................... 24
Hình 2.24: Các khuyết tật hàn không thấu ....................................................................... 25
Hình 2.25: Robot MINI Climber ....................................................................................... 25
Hình 2.26: Robot kiểm tra bồn chứa xăng dầu [6] ............................................................ 26
Hình 2.27: ScoRpion B-Scan [19]..................................................................................... 27
Hình 2.28: Robot RMS2 đang kiểm tra khuyết tật bồn chứa [22] ................................... 28
Hình 2.29: TriPod của công ty Jireh [20] .......................................................................... 29
Hình 2.30: Robot leo tường của sinh viên Đại học Bách Khoa Đà Nẳng [23] ................. 30
Hình 2.31: Robot leo bám tường của Học viện Kỹ Thuật Quân Sự [24].......................... 30
Hình 3.1: Sử dụng borescopes kiểm tra [5] ..................................................................... 33
Hình 3.2: Kiểm tra bằng chất lỏng thẩm thấu ................................................................. 34
Hình 3.3: Chụp phim đường hàn ..................................................................................... 35
Hình 3.4: Trục khuỷu với vết nứt gần lỗ tra dầu sử dụng hạt huỳnh quang ướt ............. 36
Hình 3.5: Các vết nứt của trục truyền động sử dụng hạt huỳnh quang ướt..................... 36
Hình 3.6: Thiết bị kiểm tra bột từ.................................................................................... 37
Hình 3.7: Kiểm tra bằng dòng điện xoáy ........................................................................ 39
Hình 3.8: Nguyên lý của phương pháp siêu âm kiểm tra khuyết tật vật liệu [3] ............ 40
Hình 3.9: Các loại và máy siêu âm khuyết tật TOKIMEC [3]........................................ 40
Hình 3.10: Thiết bị siêu âm Phased Array ........................................................................ 42
Hình 3.11: Thành phần cơ bản của hệ thống Phased Array [8] ........................................ 42
Hình 3.12: Đầu dò Phased array [7] .................................................................................. 43
Hình 3.13: Mặt cắt đầu dò Phased array [7]...................................................................... 43
Hình 3.14: Các dạng đầu dò Phased array của hãng olumpus NDT [8] .......................... 45
Hình 3.15: Các loại nêm đầu dò Phased array [7]............................................................. 45
Hình 3.16: Sự tạo thành chùm tia và thời gian trễ cho sự phát và nhận chùm tia [8] ....... 47
Hình 3.17: Điều khiển các chùm tia siêu âm [7] ............................................................... 48
Hình 3.18: Khẩu độ hiệu dụng [7]..................................................................................... 48
Hình 3.19: Quét tuyến tính với chùm tia thẳng và hình ảnh A scan thu được [7] ............ 49
Hình 3.20: Quét tuyến tính với chùm góc và hình ảnh A Scan thu được [7].................... 49
Hình 3.21: Hình ảnh sóng thẳng A-scan [16]................................................................... 50
Hình 3.22: Hình ảnh A- scan của chùm tia góc [16] ......................................................... 50
Hình 3.23: Hiển thị dạng B-Scan ...................................................................................... 51
Hình 3.24: Mặt cắt B scan [7] ........................................................................................... 51
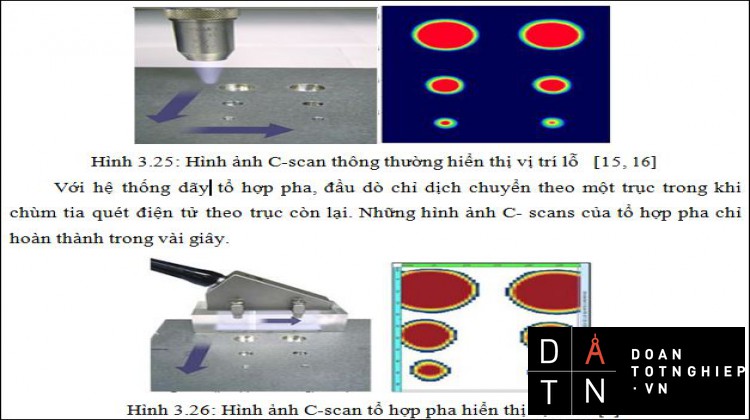
Hình 3.25: Hình ảnh C-scan thông thường hiển thị vị trí lỗ [15, 16] .............................. 52
Hình 3.26: Hình ảnh C-scan tổ hợp pha hiển thị vị trí lỗ [7] ............................................ 52
Hình 3.27: Hình ảnh hiển thị C Scan kiểm tra đường hàn [7] .......................................... 52
Hình 3.28: Hình ảnh S scan ở góc quét -300 đến 300 [16] ............................................. 53
Hình 3.29: Thiết bị Model Phasor CV/DM của hảng Krautkramer .................................. 55
Hình 4.1: Hình vẽ mô tả kích thước cơ bản của bồn ....................................................... 60
Hình 4.2: Cơ cấu mang đầu dò siêu âm........................................................................... 60
Hình 4.3: Sơ đồ kiểm tra theo chiều ................................................................................ 61
Hình 4.4: Sơ đồ kiểm tra theo ......................................................................................... 61
Hình 4.5: Sơ đồ chiến lược đo kiểm................................................................................ 62
Hình 4.6: Chuyển động thẳng theo phương đứng ........................................................... 62
Hình 4.7: Robot chuyển động quay sang phải ................................................................ 63
Hình 4.8: Chuyển động thẳng theo phương ngang.......................................................... 63
Hình 4.9: Chuyển động xoay sang phải .......................................................................... 63
Hình 4.10: Chuyển động thẳng theo phương đứng ........................................................... 64
Hình 4.11: Chuyển động xoay sang trái ............................................................................ 64
Hình 4.12: Chuyển động thẳng theo phương ngang.......................................................... 64
Hình 4.13: Chuyển động xoay sang trái ............................................................................ 65
Hình 4.14: Chuyển động thẳng theo phương đứng ........................................................... 65
Hình 4.15: Giác hút chân không........................................................................................ 66
Hình 4.16: Bánh xe có gắn nam châm............................................................................... 67
Hình 4.17: Nam châm điện................................................................................................ 68
Hình 4.18: Cơ cấu mang đầu dò ........................................................................................ 70
Hình 4.19: Mô hình kết cấu tổng thể của robot (nam châm vĩnh cữu) ............................ 70
Hình 4.20: Kết cấu tổng thể của robot (nam châm điện) .................................................. 71
Hình 5.1: Mô hình phân tích lực của robot ..................................................................... 73
Hình 5.2: Thử nghiệm lực hút nam châm........................................................................ 76
Hình 5.3: Nam châm điện HCNE1-P34 .......................................................................... 76
Hình 5.4: Động cơ GB37Y3530...................................................................................... 78
Hình 5.5: Phân tích động học trên Robot ........................................................................ 79
Hình 5.6: Vận tốc bên trái và bên phải ............................................................................ 80
Hình 5.7: Kích thước cơ bản cơ cấu mang đầu dò .......................................................... 82
Hình 5.8: Kích thước cơ bản hộp điều khiển và bánh xe nam châm .............................. 83
Hình 5.9: Sơ đồ tổng quát mô hình hệ thống điều khiển................................................. 83
Hình 5.10: Thuật toán điều khiển tổng quan của robot ................................................. 84
Hình 5.11: Thuật toán điều khiển chuyển động của robot ............................................ 84
Hình 5.12: KIT STM32F4 Discovery ............................................................................... 85
Hình 5.13: Module RF SI4463 .......................................................................................... 86
Hình 5.14: Driver Motor ................................................................................................... 86
Hình 5.15: Sơ đồ nguyên lý mạch điều khiển ................................................................... 87
Hình 6.1: Mô hình thiết kế 2D một phần nhỏ bồn chứa.................................................. 89
Hình 6.2: Mô hình thiết kế 3D mô hình bồn chứa .......................................................... 90
Hình 6.3: Thi công nền móng bồn chứa .......................................................................... 90
Hình 6.4: Hàn tấm thép thứ nhất với đáy bồn ................................................................. 91
Hình 6.5: Hàn nối tấm thép thứ hai với tấm thép thứ nhất.............................................. 91
Hình 6.6: Sơn chống rỉ bề mặt thân bồn chứa ................................................................. 92
Hình 6.7: Hoàn thiện mô hình bồn chứa ......................................................................... 92
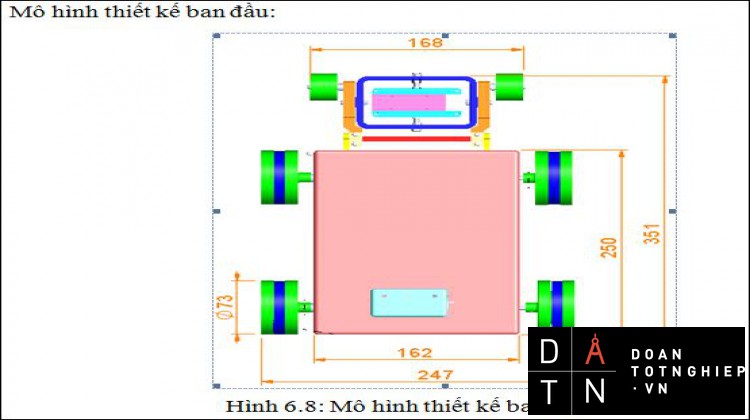
Hình 6.8: Mô hình thiết kế ban đầu ................................................................................. 93
Hình 6.9: Hộp robot......................................................................................................... 93
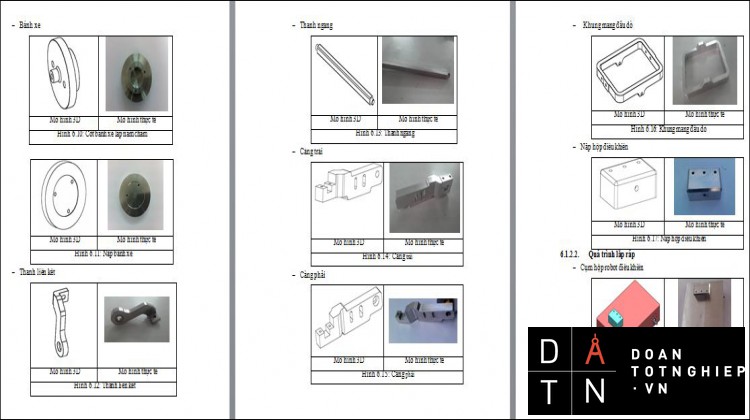
Hình 6.10: Cốt bánh xe lắp nam châm .............................................................................. 94
Hình 6.11: Nắp bánh xe..................................................................................................... 94
Hình 6.12: Thanh liên kết .................................................................................................. 94
Hình 6.13: Thanh ngang .................................................................................................... 95
Hình 6.14: Càng trái .......................................................................................................... 95
Hình 6.15: Càng phải.........................................................................................................95
Hình 6.16: Khung mang đầu dò ........................................................................................ 96
Hình 6.17: Nắp hộp điều khiển ......................................................................................... 96
Hình 6.18: Cụm hộp robot điều khiển ............................................................................... 96
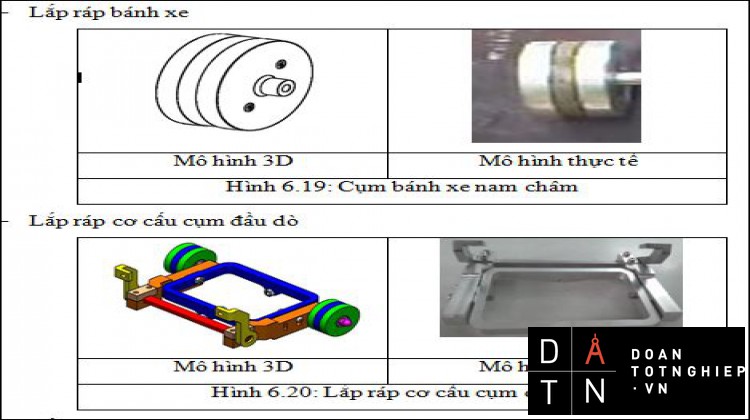
Hình 6.19: Cụm bánh xe nam châm .................................................................................. 97
Hình 6.20: Lắp ráp cơ cấu cụm đầu dò ............................................................................. 97
Hình 6.21: Robot hoạt động thử nghiệm ........................................................................... 97
Hình 6.22: Tấm trên của khung robot ............................................................................... 98
Hình 6.23: Tấm trước của khung robot ............................................................................. 98
Hình 6.24: Tấm sau của khung robot ................................................................................ 99
Hình 6.25: Tấm bên hong của khung robot ....................................................................... 99
Hình 6.26: Trụ lắp nam châm điện .................................................................................... 99
Hình 6.27: Bánh xe ..........................................................................................................100
Hình 6.28 : Lắp ráp robot hoàn chỉnh..............................................................................100
Hình 6.29: Giao diện điều khiển .....................................................................................101
Hình 6.30: Chọn cổng COM kết nối ...............................................................................102
Hình 6.31: Thông báo kết nối thành công .......................................................................102
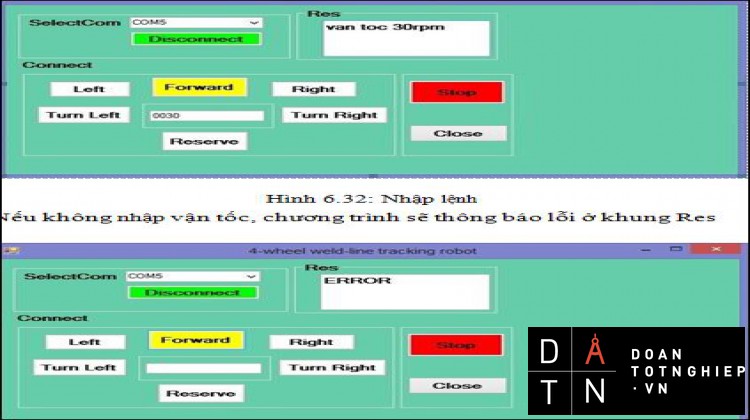
Hình 6.32: Nhập lệnh ......................................................................................................103
Hình 6.33: Lỗi khi không nhập giá trị vận tốc ................................................................103
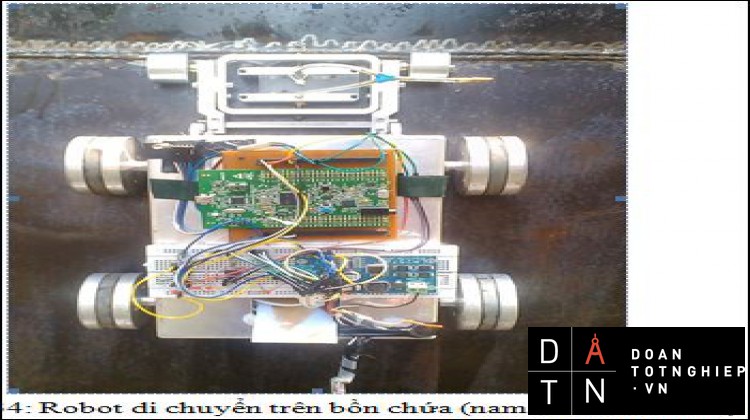
Hình 6.34: Robot di chuyển trên bồn chứa (nam châm vĩnh cửu) ..................................104
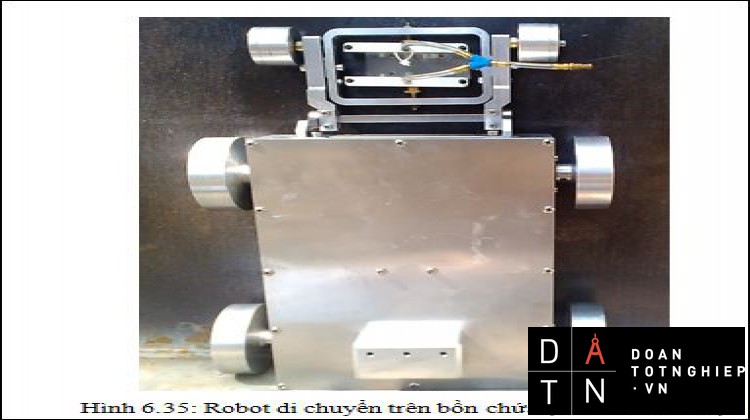
Hình 6.35: Robot di chuyển trên bồn chứa (nam châm điện) .........................................105
DANH SÁCH BẢNG
Bảng 2.1: Mức độ chịu ăn mòn của vật liệu [15] .............................................................. 15
Bảng 3.1: Thông số nêm đầu dò ........................................................................................ 46
Bảng 3.2: Thông số kỹ thuật của máy chính Omniscan ................................................... 54
Bảng 3.3: Thông số kỹ thuật Module Phased Array (áp dụng cho Module 16:128) ......... 54
Bảng 3.4: Thông số kỹ thuật ở chế độ phasor CV ............................................................ 56
Bảng 3.5: Thông số kỹ thuật ở chế độ phasor DM ............................................................ 57
Bảng 4.1: So sánh các phương án ...................................................................................... 62
Bảng 4.2: So sánh các phương án ...................................................................................... 69
Chương1
MỞĐẦU
1.1. Đặt vấn đề
Nước ta hiện nay, các công trình xây dựng nhà máy lọc dầu ngày càng tăng, các dự án xây dựng bồn bể chứa ngày càng nhiều. Để đáp ứng việc tồn trữ và vận chuyển nghiên liệu đảm bảo an toàn thì việc kiểm tra chất lượng của các công trình bồn bể, ống là cần thiết. Tuy nhiên, trong quá trình kiểm tra chất lượng của bồn bể, đa số sử dụng sức người với các thiết bị cầm tay nên chỉ kiểm tra được ở những vị trí dưới đáy bồn và phần thân kề đáy bồn. Đối với phần trên cao của thân bồn thì việc kiểm tra sẽ khó khăn và nguy hiểm. Vì vậy, cần phải sử dụng máy móc để đảm nhận việc kiểm tra đối với những vị trí trên cao của thân bồn trở nên cần thiết và quan trọng.
Vì những lý do trên đề tài: " Nghiên cứu, thiết kế và chế tạo thử nghiệm robot kiểm tra độ mòn bồn chứa xăng dầu" là một vấn đề cấp bách.
1.2. Tính cấp thiết của đề tài
Bồn bể chứa có vai trò quan trọng trong ngành công nghiệp dầu khí. Việc kiểm tra đánh giá định kỳ chất lượng bồn bể để kịp thời sửa chửa là điều cần thiết. Để đảm bảo việc kiểm tra, kiểm định chất lượng các công trình bồn bể đạt độ chính xác và hiệu quả cao thì lựa chọn phương pháp kiểm tra siêu âm là sự lựa chọn phù hợp nhất.
Ở nước ta hiện nay, việc kiểm tra bồn bể chứa vẫn còn nhiều khó khăn vì những
lý do sau:
- Việc kiểm tra còn mang tính thủ công hoặc bán tự động.
- Chi phí đầu tư thiết bị kiểm tra cao.
- Chưa làm chủ được công nghệ trên thế giới.
- Chưa có thiết bị kiểm tra thân bồn chứa .
Chính vì vậy đề tài: " Nghiên cứu, thiết kế và chế tạo thử nghiệm robot kiểm tra độ mòn bồn chứa xăng dầu" do học viên lựa chọn có tính cấp thiết và khả năng ứng dụng ở Việt Nam.
1.3. Ý nghĩa khoa học và thực tiễn của đề tài
1.3.1. Ý nghĩa khoa học của đề tài
Đề tài nghiên cứu về lĩnh vực robot và có một số ý nghĩa khoa học sau:
- Đề xuất được nguyên lý hoạt động của robot kiểm tra mòn.
- Đề xuất được phương án bám dính của robot trên bề mặt bồn chứa.
- Ứng dụng phương pháp và kỹ thuật siêu âm tổ hợp pha để kiểm tra độ mòn.
- Giới thiệu một số thiết bị đo siêu âm tổ hợp pha.
1.3.2. Tính thực tiễn của đề tài
Robot mang đầu dò siêu âm tổ hợp pha có thể được ứng dụng trong ngành dầu khí và thủy lợi nhằm phát hiện khuyết tật ăn mòn trong quá trình sử dụng để kịp thời sửa chữa và bảo dưỡng. Ngoài ra, robot giúp cho quá trình kiểm tra đánh giá chất lượng bồn chứa nhanh chóng và đạt hiệu quả kinh tế cao.
1.4. Mục tiêu nghiên cứu đề tài
- Đề tài nghiên cứu đánh giá độ ăn mòn bồn chứa xăng dầu dung tích lớn.
- Thử nghiệm, phát triển các phương án bám dính trên bề mặt bồn chứa.
- Thiết kế, chế tạo thử nghiệm robot mang đầu dò siêu âm kiểm tra và đánh giá
độ ăn mòn bồn chứa.
- Thiết lập qui trình sử dụng và vận hành của thiết bị.
1.5. Đối tượng và phạm vi nghiên cứu
1.5.1. Đối tượng nghiên cứu của đề tài
Với các mục tiêu trên, các đối tượng nghiên cứu của đề tài có thể được xác định, bao gồm:
- Bồn chứa xăng dầu dung tích lớn.
- Các dạng khuyết tật hàn và ăn mòn.
- Thiết bị hổ trợ kiểm tra độ ăn mòn.
1.5.2. Phạm vi nghiên cứu của đề tài
Do phạm vi nghiên cứu của đề tài khá rộng nên trong khuôn khổ một luận văn cao học các giới hạn nghiên cứu được xác định như sau:
- Bồn chứa xăng dầu dung tích lớn (đường kính 30 m, dung tích khoảng 10.000 m3, cao khoảng 14 m).
- Thiết kế và chế tạo thử nghiệm robot mang thiết bị siêu âm tổ hợp pha để kiểm tra độ mòn của bồn.
- Chỉ kiểm tra độ mòn của bồn chứa xăng dầu và chỉ kiểm tra phần thân trụ của bồn (phần nóc và đáy bồn không nằm trong phạm vi của đề tài).
1.6. Phương pháp nghiên cứu
1.6.1. Cơ sở phương pháp luận
- Nghiên cứu đi từ phân tích lý thuyết, nguyên lý rồi đưa ra yêu cầu thiết kế.
- Dựa vào yêu cầu thiết kế dùng phần mềm mô phỏng đưa ra các phương án rồi chọn một phương án hợp lý nhất.
- Tiến hành chế tạo thử nghiệm và đánh giá quá trình hoạt động.
1.6.2. Các phương pháp nghiên cứu cụ thể
1.6.2.1. Phương pháp phân tích lý thuyết
- Thu thập tài liệu từ các bài báo khoa học, tạp chí, sách giáo trình và nguồn từ internet trong và ngoài nước có liên quan đến nội dung nghiên cứu. Tìm hiểu và phân tích các cơ cấu tạo thành robot leo tường, các nguyên lý hoạt động của thiết bị kiểm tra độ mòn rồi từ đó đưa ra phương án thiết kế và tính toán.
- Thử nghiệm mô phỏng dựa vào phần mềm thiết kế 3D để trực quan.
1.6.2.2. Phương pháp thực nghiệm
- Dùng phương pháp thử và sai để có các số liệu hoàn chỉnh trong phần thiết kế và kết cấu.
- Dựa vào thiết kế hoàn chỉnh và chế tạo thử nghiệm robot mang đầu dò siêu âm tổ hợp pha rồi từ đó đưa ra quy trình vận hành và sử dụng.
1.7. Kết cấu của luận văn
Kêt cấu luận văn gồm 7 chương với các nội dung sau:
- Chương 1: Mở đầu
- Chương 2: Tổng quan
Giới thiệu về bồn chứa, các khuyết tật hàn, ăn mòn của bồn; Các phương pháp kiểm tra. Các nghiên cứu trong và ngoài nước cũng như định hướng
nghiên cứu của đề tài.
- Chương 3: Cơ sở lý thuyết
Trình bày nguyên lý hoạt động, ưu nhược điểm các phương pháp kiểm tra
không phá hủy; Trình bày kỹ thuật siêu âm Phased Array.
- Chương 4: Yêu cầu và phương án thiết kế
Phân tích các đối tượng thiết kế, phương án thiết kế cũng như xây dựng kết
cấu tổng thể robot mang đầu dò siêu âm Phased Array.
- Chương 5: Tính toán, thiết kế cơ cấu
Tính toán lực hút của nam châm, trên cơ sở đó tính toán và chọn công suất động cơ.
- Chương 6: Chế tạo, thử nghiệm và đánh giá
Thực hiện chế tạo các chi tiết dựa trên bản vẽ thiết kế rồi lắp ráp và đánh giá quá trình hoạt động.
- Chương 7: Kết luận và kiến nghị
Trình bày kết luận và kiến nghị.
Chương2
TỔNG QUAN
2.1. Bồn chứa xăng dầu
Nền kinh tế nước ta hiện nay, ngành dầu khí đang gánh vác một sứ mệnh vô cùng to lớn. Nó có nhiệm vụ khai thác, chế biến và xuất khẩu dầu để mang lại nguồn vốn lớn góp phần cho sự phát triển kinh tế xã hội đất nước.
Bồn chứa có vai trò rất quan trọng đối với ngành dầu khí, nó có nhiệm vụ: bảo quản, tồn trữ nguyên liệu và sản phẩm nhằm phục vụ nhu cầu sản xuất và kinh doanh. Tại đây các hoạt động kiểm tra chất lượng, số lượng và phân tích các chỉ tiêu trước khi xuất hàng được thực hiện.
2.1.1. Phân loại bồn chứa
2.1.1.1. Theo hình dáng của bể
- Bể chứa hình trụ
Bể chứa trụ đứng:
Bể trụ đứng chứa từ 100 – 20.000m3 (chứa xăng), bể dùng mái có cột chống hay
không có cột chống, có ưu điểm là khi chế tạo và lắp ghép và dung tích chứa lớn.
Nhưng thường chỉ chứa được các chất lỏng hay khí có áp suất không cao [10].
Hình2.1: Bể trụđứng
Bể chứa trụ ngang:
Có ưu điểm như bể chứa trụ đứng như đơn giản khi chế tạo và lắp ghép, đặc biệt có thể chế tạo tại nhà máy rồi vận chuyển đến công trình, khả năng chịu áp lực cao,
nhưng thể tích nhỏ (50 - 500 m3), chứa gas, xăng, hơi hóa hỏng [10].
- Bể chứa cầu
Hình 2.2: Bể trụ ngang
Dùng để chứa hơi hóa lỏng với áp suất dư Pd = 0,25 - 1,8 MPa. Chúng có ưu điểm là chịu được áp suất cao, giảm tổn thất mất mát do bay hơi, ứng suất đều theo các phương, tuy nhiên rất khó khăn khi chế tạo [10].
Hình 2.3: Bể chứa xăng dầu tại Nhà máy Lọc dầu số 1 Dung Quất
2.1.1.2 Theo áp suất làm việc [21]
- Bể cao áp: Áp suất chịu đựng trong bể > 200 mmHg.
- Bể áp lực trung bình: Áp suất từ 20 mmHg - 200 mmHg.
- Bể áp thường: Áp suất = 20 mmHg. Áp dụng cho bể dầu nhờn.
2.1.1.3. Theo vật liệu xây dựng [21]
- Bể kim loại: Làm bằng thép. Áp dụng cho hầu hết các bể lớn hiện nay.
- Bể phi kim: Làm bằng vật liệu như: gỗ, composite. Áp dụng cho các bể nhỏ.
2.1.1.4. Theo chiều cao xây dựng [21]
- Bể ngầm: Được đặt bên dưới mặt đất, thường dùng trong các cửa hàng bán lẻ.
- Bể nổi: Được xây dựng trên mặt đất sử dụng ở các kho lớn.
- Bể nửa ngầm: Loại bể có 1/2 chiều cao bể nhô lên mặt đất.
- Bể ngoài khơi: Được thiết kế nổi trên mặt nước, có thể di chuyển từ nơi này đến nơi khác một cách dễ dàng.
2.1.2. Kết cấu của bồn
Kết cấu của một bồn chứa sử dụng trong công nghiệp dầu khí nói chung thường gồm ba bộ phận chính là thân, đáy và mái (hình 2.4).
Hình 2.4: Kết cấu của bồn chứa xăng dầu [11]
2.1.2.1. Thân bồn chứa
Thân thường là hình trụ hoặc hình cầu. Chúng được chế tạo bằng phương pháp cuốn, dập, vê và hàn nhiều tấm thép lại với nhau. Độ dày của tấm thép có thể thay đổi hoặc không đổi tùy thuộc vào dung tích của bồn. Dung tích của bồn chứa tùy thuộc vào đối tượng sử dụng. Thân bồn chứa hình trụ thường được sử dụng nhiều hơn thân bồn chứa dạng hình cầu do dễ chế tạo, lắp đặt các thiết bị phụ trợ. Tuy nhiên, đối với các dạng chất lỏng hoặc khí đòi hỏi bồn chứa chịu áp lực cao và tính thẩm mỹ thì thường sử dụng bồn hình cầu do ứng suất được phân bố đều trong thành bồn.
Thân bồn là bộ phận chịu lực chính, gồm nhiều khoang thép tấm hàn lại, chiều dày các thép tấm có thể thay đổi hoặc không dọc theo thành bồn. Liên kết giữa các thép tấm trong cùng một đoạn thân là đường hàn giáp mí, liên kết giữa các đoạn thân dùng đường hàn vòng hoặc giáp mí. Nối thân bồn và đáy bồn dùng đường hàn góc.
Hình 2.5: Chi tiết về thân bồn chứa xăng dầu
Quy cách thép tấm thân bồn:
- Từ lớp 1 - lớp 2: 14mm x 2000 mm x 6000 mm.
- Từ lớp 3 - lớp 5: 12mm x 2000 mm x 6000 mm.
- Từ lớp 6 - lớp 7: 10mm x 2000 mm x 6000 mm.
2.1.2.2. Đáy bồn chứa
Đáy bồn chứa được đặt trên nền cát đầm chặt và chịu áp lực chất lỏng. Đáy bồn gồm các thép tấm có kích thước lấy theo định hình sản xuất và được liên kết với nhau bằng đường hàn.
đáy bồn chứa
Hình 2.6: Công nhân đang hàn đáy bồn chứa [12]
2.1.2.3. Mái bồn chứa
Mái bồn được tổ hợp từ các tấm thép hàn lại với các dạng chính như sau: mái nón,
mái treo, mái cầu, mái trụ cầu.
Mái bồn chứa
Hình 2.7:Mái bồn chứa
2.1.2.4. Các thiết bị phụ trợ
Nhằm đảm bảo cho công việc xuất nhập tại bồn chứa xăng dầu được thuận lợi và đảm bảo an toàn trong việc chứa xăng dầu trong bể. Các thiết bị phụ trợ thường được sử dụng trong các bồn chứa xăng dầu:
- Van xả hơi (1).
- Vòi phun (2).
- Cửa (3,7).
- Vỏ bọc dầu (4).
- Máng thoát nước (5).
- Cầu thang (6).
- Thiết bị dùng để đo lường mức độ của chất lỏng trong bể (8).
- Đầu tiếp nhiên liệu phụ (9).
- Áp kế (10).
- Van xả (11).
- Vách bảo vệ (12).
- Đầu tiếp nhiên liệu chính (13).
- Rãnh làm bằng bê tông: dùng để dẫn nước (14).
Hình 2.8: Các thiết bị phụ trợ của bồn chứa [18]
2.1.3. Thi công lắp đặt bồn chứa xăng dầu
2.1.3.1. Lắp đặt bồn thép dạng tấm phẳng
- Các tấm thép ở vòng đầu tiên và mái che được lắp với nhau an toàn trên nền đất.
- Thành bồn và mái được nâng lên bằng hệ thống nâng chuyên dụng và vòng kế tiếp được lắp ráp tiếp vào phía dưới.
- Sau khi vòng cuối cùng được lắp ráp, bồn chứa được hạ xuống để thi công phần liên kết với nền móng.
Hình 2.9: Lắp đặt bồn thép dạng tấm phẳng [13]
2.1.3.2. Lắp đặt bồn thép tấm mặt bích
- Các tấm thép ở vòng đầu tiên được lắp đặt chính xác vào nền móng đã thi công trước.
- Các vòng kế tiếp được lắp ráp với vòng phía dưới bằng cần cẩu. Quá trình lắp ráp như vậy cho đến hết chiều cao thân bồn.
- Mái che được lắp đặt hoàn chỉnh trên mặt đất và dùng cần cẩu vào đúng vị trí liên kết với thành bồn.
Hình 2.10: Lắp đặt bồn thép tấm mặt bích [13]
2.1.4. Tình hình xây dựng bể chứa ở nước ta
Ở nước ta, bể chứa xuất hiện từ cuối thế kỉ XIX và đầu thế kỉ XX, chủ yếu phục vụ cho công cuộc khia thác thuộc địa của Pháp. Hiện nay, đất nước ngày càng phát triển, kéo theo hàng loạt nhà máy dầu khí ra đời nhằm đáp ứng nhu cầu về xăng dầu, gas tăng cao.
Nhà máy lọc dầu Dung Quất với khu bể chứa dầu thô có 6 bể chứa khổng lồ đường kính 69m, chiều cao 22m, tổng dung tích 390.000m3. Khu bể chứa sản phẩm có
23 bể chiếm dung tích là 393.000m3. Khu bể chứa trung gian có 25 bể với tổng thể tích
hơn 400.000m3.
Hình 2.11: Ba bồn hình cầu thuộc nhà máy lọc dầu Dung Quất [14]
Năm 2012 Công ty cổ phần Kết cấu kim loại và Lắp máy dầu khí thuộc Tổng Công ty cổ phần xây lắp Dầu khí Việt Nam thực hiện mở rộng tổng kho xăng dầu Nhà Bè (sức chứa giai đoạn 1 và 2 là 100.000m3. Giai đoạn 3 thi công thêm 3 bồn có tổng sức chứa 70.000m3).
Hình 2.12: Tổng kho xăng dầu Nhà Bè
Mở rộng Kho cảng xăng dầu Chân Mây - Thừa Thiên - Huế (3 bồn chứa xăng dầu với tổng dung tích 15.000m3, 1 bồn cứu hỏa 1.000m3.
Hình 2.13: Dự án Mở rộng Kho cảng xăng dầu Chân Mây- Thừa Thiên Huế
Hệ thống kho cảng của tổng công ty xăng dầu quân đội [15]:
- Kho trực thuộc Tổng Công ty quản lý: 70.000m3
Kho K99 - Hải Phòng: Trữ lượng 25.000m3
Kho 662 - Nha Trang: Trữ lượng 12.000m3
Kho K720 - Nha Trang: Trữ lượng 14.500m3
Kho K83 - Đà Nẵng: Trữ lượng 18.500m3
- Khu vực Miền Nam: 73.400m3
Kho 186 - TP HCM: Trữ lượng: 15.500m3
Kho VK102 - TP HCM: Trữ lượng: 22.300m3
Kho Giang Nam: Trữ lượng: 15.000m3
Kho Cần Giờ: Trữ lượng: 10.000m3
Kho Hà Lộc: Trữ lượng: 10.600m3
- Khu vực Miền Bắc: 94.500m3
TK 190 (Đông Anh, HN):Trữ lượng: 16.500m3
Kho 671 (Bắc Giang): Trữ lượng: 20.500m3
Kho 661 (Bắc Giang): Trữ lượng: 17.000m3
Kho 19/9 (Hải Phòng): Trữ lượng: 25.500m3
Kho KV3 (Hải Phòng): Trữ lượng: 15.000m3
- Khu vực Miền Trung: 27.500m3
Kho 662 - Nha Trang: Trữ lượng: 17.500m3
Kho Thanh Huyền: Trữ lượng: 10.000m3
Hình 2.14: Cụm kho cảng xăng dầu - Tổng Công ty xăng dầu Quân Đội [15]
2.2. Khuyết tật ăn mòn
2.2.1. Định nghĩa ăn mòn.
Trên quan điểm nhìn nhận vấn đề ăn mòn kim loại là sự phá hủy kim loại và gây ra thiệt hại thì: Sự ăn mòn kim loại là quá trình làm giảm chất lượng và tính chất của
kim loại do sự tương tác của chúng với môi trường sâm thực gây ra [1].
Sự ăn mòn thường bắt đầu xảy ra trên bề mặt kim loại, rồi quá trình phát triển vào sâu bên trong kèm theo sự biến đổi thành phần và tính chất của kim loại và hợp kim.
2.2.2. Phân loại ăn mòn
Ăn mòn có thể được phân loại:
- Dựa theo quá trình ăn mòn: ăn mòn hóa học, ăn mòn điện hóa.
- Dựa theo môi trường: ăn mòn trong khí (oxy, khí sunfuarơ, khí H2S, ...), ăn mòn trong không khí, ăn mòn trong đất và ăn mòn trong chất lỏng (kiềm, axit, muối).
2.2.3. Phân loại mức độ chịu ăn mòn của vật liệu
Bảng 2.1: Mức độ chịu ăn mòn của vật liệu [15]
|
Nhóm chịu ăn mòn |
Chỉ số ăn mòn sâu(mm/năm) |
Thang |
|
Cực kỳ bền |
< 0,001 |
1 |
|
Rất bền |
0,001 - 0,005
0,005 - 0,010 |
2
3 |
|
Bền |
0,01 - 0,05
0,05 - 0,1 |
4
5 |
|
Khá bền |
0,1 - 0,5
0,5 - 1 |
6
7 |
|
Kém bền |
1,0 - 5,0
5 - 10 |
8
9 |
|
Không bền |
> 10 |
10 |
Đa số kim loại đều bị ăn mòn khi tiếp xúc với môi trường. Khả năng phát sinh ăn mòn phụ thuộc nhiều yếu tố: loại kim loại, tính chất môi trường, nhiệt độ, thời gian, áp lực.
2.2.4. Các dạng ăn mòn
2.2.4.1. Ăn mòn đều
Đặc điểm của dạng ăn mòn đều là tốc độ ăn mòn ở mọi chỗ trên bề mặt gần bằng
2.2.4.2. Ăn mòn cục b
Hình 2.15: Ăn mòn đều [1
Dạng ăn mòn này xảy ra ưu tiên tại một số phần diện tích bề mặt kim loại tiếp xúc với môi trường ăn mòn. Hiện tượng ăn mòn cục bộ rất phổ biến và đa dạng, chia thành các loại sau [1]:
- Ăn mòn tiếp xúc (ăn mòn Ganvanic)
Một số trường hợp xảy ra ăn mòn tiếp xúc:
Các đinh ốc vít hoặc các tấm thép mạ kẽm trong môi trường chất điện li, kẽm có điện thế âm hơn kim loại nền và sẽ dễ dàng bị ăn mòn theo cơ chế
ăn mòn tiếp xúc.
Các ốc vít bằng thép sẽ bị ăn mòn khi tiếp xúc với các vật liệu đồng thau trong môi trường nước biển.
Có rất nhiều yếu tố ảnh hưởng đến quá trình ăn mòn tiếp xúc, song có hai yếu tố quan trọng:
Độ dẫn điện của dung dịch chất điện li: nếu điện trở dung dịch lớn, ví dụ
nước sông, ao hồ dẫn đến sự giảm tốc độ ăn mòn nói chung, song có thể dẫn đến tăng tốc độ ăn mòn cục bộ tại vùng tiếp xúc.
Khi hai kim loại tiếp xúc với nhau trong môi trường ăn mòn, nếu điện tích
của kim loại có điện thế dương hơn càng lớn (vùng catot), độ phân cực catot càng giảm thì tốc độ ăn mòn càng lớn. Vì vậy, để chống ăn mòn kim loại điện hóa, nếu điện tích của vùng anot so với vùng catot càng bé thì dòng ăn mòn càng giảm.
Nhiệt độ và PH dung dịch đều ảnh hưởng đến tốc độ ăn mòn tiếp xúc.
Để làm giảm tốc độ ăn mòn tiếp xúc của một thiết bị trong môi trường ăn mòn cần phải tránh sự tiếp xúc của hai kim loại có điện cực khác nhau, chọn tỷ lệ diện tích vùng catot và anot thích hợp. Có thể bảo vệ chống ăn mòn bằng phương pháp bảo vệ catot bằng cách gắn một kim loại hoạt động hơn vào chỗ tiếp xúc.
- Sự ăn mòn kim loại do sự chênh lệch khí
Hiện tượng ăn mòn chênh lệch khí thường xảy ra trong các trường hợp sau:
Ăn mòn khe: tại những khe giữa các mặt bích có lớp đệm của các chỗ nối hai ống kim loại hoặc dưới các vật đệm đã tán ốc (tán rivê) hoặc có ốc xiết
có thể sinh ra ăn mòn cục bộ vì trong các khe đó nồng độ của không khí nghèo hơn ở ngoài.
Ăn mòn tại những vùng mớn nước.
Ăn mòn do lắng đọng: tại những chỗ bị che khuất nghèo oxi và bị ăn mòn.
2.2.4.3. Ăn mòn lỗ (ăn mòn điểm - Pitting Corrosion)
Ăn mòn lỗ là một dạng ăn mòn cục bộ tạo ra các lỗ có kích thước nhỏ, độ sâu của lỗ có thể lớn hơn đường kính của nó. Dạng ăn mòn này xảy ra trên các kim loại, hợp kim có màng thụ động ( AL,Ni, Ti, Zn, thép không gỉ) hoặc có các lớp phủ bảo vệ bị xuyên thủng. Hình dáng các lỗ do an mòn gây ra phụ thuộc vào bản chất lớp phủ [1].
2.2.4.4. Một số dạng ăn mòn khác
- Ăn mòn ranh giới.
- Ăn mòn nứt do ứng suất: Ăn mòn nứt là do sự gãy bởi ứng suất kéo và môi trường ăn mòn gây ra.
- Ăn mòn mỏi.
- Ăn mòn chọn lọc.
- Ăn mòn mài mòn.
- Ăn mòn do ma sát.
Một số hình ảnh về ăn mòn của bồn chứa xăng dầu
Hình 2.16: Hư hỏng đường hàn và mài mòn bên trong của thân bồn chứa
Hình 2.17: Mài mòn nền bồn chứa và lớp phủ đường hàn bị bóc ra
Hình 2.18: Ăn mòn mái che
2.3. Kiểm tra mòn
Bất cứ thiết bị hay kết cấu làm bằng thép đều có khả năng bị ăn mòn. Ăn mòn có thể xảy ra ở bên ngoài hay bên trong kế cấu. Quá trình ăn mòn xảy ra bên trong của kết cấu khó phát hiện ra nếu không phá hủy chúng. Nếu việc thực hiện kiểm tra bằng phương pháp phá hủy thì sẽ gây lãng phí và chậm tiến độ công việc.
Ngành công nghiệp dầu khí ngày càng phát triển, đường ống và bồn bể chứa xăng dầu ngày càng tăng. Qua thời gian sử dụng thì đường ống và bồn bể chứa sẽ bị ăn mòn. Điều này, đòi hỏi việc kiểm tra chiều dày còn lại của đường ống, bồn bể mà không phá hủy kết cấu là rất quan trọng và cần thiết. Vậy việc áp dụng phương pháp kiểm tra không phá hủy cho việc kiểm tra mòn của đường ống, bồn bể trể nên rất cấp thiết.
Kiểm tra không phá hủy (Non - Destructive Testing, NDT) là việc sử dụng các phương pháp vật lý để kiểm tra phát hiện các khuyết tật bên trong hoặc ở bề mặt vật kiểm mà không làm tổn hại đến khả năng sử dụng chúng.
Kiểm tra không phá hủy dùng để phát hiện các khuyết tật như vết nứt, rỗ khí, ngậm xỉ, tách lớp, không ngấu trong các mối hàn, kiểm tra ăm mòn của kim loại, tách lớp của vật liệu compoosit, đo độ cứng của vật liệu, đo bề dày vật liệu, ...
Kiểm tra không phá hủy có rất nhiều phương pháp, các phương pháp này phân loại theo khả năng phát hiện khuyết tật:
- Các phương pháp phát hiện khuyết tật nằm sâu bên trong đối tượng kiểm tra:
Chụp ảnh bức xạ hay còn gọi là chụp phim (Radiographic testing - RT).
Kiểm tra Siêu âm (Ultrasonic test -UT).
- Các phương pháp phát hiện khuyết tật nằm trên bề mặt hay gần bề mặt đối tượng kiểm tra:
Kiểm tra bằng thị giác và quang học (Visual Testing - VT).
Kiểm tra bằng dòng xoáy điện (Eddy Current Testing - ET).
Kiểm tra bằng chất lỏng thẩm thấu (Penetrant Testing - PT).
Kiểm tra bằng bột từ (Magnetic Particle Testing - MT)
- Ngoài ra còn có những phương pháp khác như là:
Kiểm tra bằng truyền âm (Acoustic Emission Testing -AE).
Kiểm tra rò rỉ ( Leak Testing).
Kiểm tra bằng truyền âm (Acoustic Emission Testing -AE).
Ưu điểm phương pháp kiểm tra không phá hủy so với phương pháp phá
- Phương pháp kiểm tra không phá hủy không làm ảnh hưởng đến khả năng sử dụng của vật kiểm sau này.
- Phương pháp kiểm tra không phá hủy có thể kiểm tra 100% sản phẩm và đảm bảo 100% sản phẩm xuất xưởng đạt chất lượng.
- Trong chế tạo, khi sử dụng phương pháp kiểm tra không phá hủy thì dễ dàng phát hiện những khuyết tật, từ đó có thể loại bổ các bán sản phẩm, tiệt kiệm chi phí, sửa chữa khắc phục sai sót.
- Kiểm tra không phá hủy có thể đánh giá các sản phẩm, thiết bị và quy trình sản xuất công nghiệp đang hoạt động. Nhờ đó sớm phát hiện được các hỏng hóc, kịp thời thay thế khắc phục, từ đó có tiết kiệm được chi phí sửa chữa và khắc phục sự cố và đảm bảo an toàn trong sản xuất.
- Phương pháp kiểm tra không phá hủy là công cụ quan trọng trong nghiên cứu chế tạo vật liệu mới, tối ưu hóa các quy trình sản xuất, quy trình hàn thông quá các thử nghiệm, phát hiện các sai sót trong thiết kế, vật liệu, sảm phẩm. Có thể nói, kiểm tra không phá hủy là công cụ quan trọng để giảm giá thành, nâng cao sức cạnh tranh của các doanh nghiệp chế tạo, sản xuất.
Bên cạnh đó các phương pháp phá hủy có ưu điểm là cho kết quả trực tiếp, còn Phương pháp kiểm tra không phá hủy chỉ cho được các kết quả gián tiếp thông qua hình ảnh [2].
2.4. Khuyết tật hàn
2.4.1 Định nghĩa
Khuyết tật hàn là sự không liên tục trong mối hàn hoặc sai lệch về ngoại dạng so với yêu cầu [3].
Hình 2.19: Các khuyết tật đưởng hàn
2.4.2. Các loại khuyết tật hàn
2.4.2.1. Nứt
Nứt là một trong những khuyết tật nghiêm trọng nhất của liên kết hàn. Nứt có thể xuất hiện trên bề mặt mối hàn, trong mối hàn và ở vùng ảnh hưởng nhiệt. Trong quá trình sử dụng cấu kiện hàn, nếu mối hàn có vết nứt thì vết nứt đó sẽ rộng dần ra làm cho kết cấu bị hỏng [16].
- Theo nhiệt độ vết nứt xuất hiện mà phân ra hai loại:
Nứt nóng: xuất hiện trong quá trình kết tinh của liên kết hàn khi nhiệt độ
khá cao (trên 1.0000C).
Nứt nguội: xuất hiện sau khi kết thúc quá trình hàn với nhiệt độ dưới
1.0000C. Nứt nguội có thể xuất hiện vài giờ hoặc thậm chí vài ngày sau khi
hàn.
- Theo kích thước vết nứt có thể phân loại thành:
Nứt thô đại: có thể gây phá hủy kết cấu ngay khi làm việc.
Nứt tế vi: vết nứt này sẽ phát triển rộng dần ra tạo thành các vết nứt thô đại.
- Theo hình dạng vết nứt có thể phân loại thành:
Nứt dọc: các vết nứt chạy dọc theo trục mối hàn, các vết nứt này có thể xuất hiện trên kim loại cơ bản, vùng ảnh hưởng nhiệt, chân mối hàn và trên mối
hàn.
Hình 2.20: Vị trí xuất hiện vết nứt dọc
Nứt ngang: các vết nứt chạy vuông góc theo trục mối hàn, các vết nứt này có thể xuất hiện trên kim loại cơ bản, vùng ảnh hưởng nhiệt và trên mối hàn.
Các vết nứt được phát hiện trên phim X quang là một vết đen và cho một sóng thẳng trên màn hình siêu âm. Tuy nhiên dạng nứt này thường cho tín hiệu sóng phản xạ siêu âm rất kém do bề mặt vết nứt gần như song song với chùm sóng âm [16].
Hình 2.21: Vị trí xuất hiện vết nứt ngang
Nứt ở vùng gây và kết thúc hồ quang: do vị trí kết thúc hồ quang bị lõm, tồn tại nhiều tạp chất hoặc hồ quang không được bảo vệ tốt [17].
2.4.2.2. Rỗ khí
Rỗ khí là hiện tượng khí trong kim loại không kịp thoát ra ngoài trước khi kim loại đông đặc. Rỗ khí có thể sinh ra ở bên trong hoặc bề mặt mối hàn, rỗ khí có thể nằm ở phần ranh giới giữa kim loại cơ bản và kim loại đắp. Sự tồn tại của rỗ khí trong mối hàn sẽ làm giảm tiết diện làm việc, giảm cường độ chịu lực và độ kín của liên kết [17].
Hình 2.22: Khuyết tật rổ khí [17]
2.4.2.3. Ngậm xỉ
Ngậm xỉ là hiện tượng các chất rắn bên ngoài (không phải là kim loại mối hàn) bị kẹt trong kim loại mối hàn. Ngậm xỉ có thể nằm trên bề mặt mối hàn, có thể nằm giáp ranh giữa kim loại mối hàn và phần kim loại cơ bản. Lẫn xỉ ảnh hưởng lớn đến độ bền, độ dai va đập và tính dẻo của kim loại, mối hàn, giảm khả năng làm việc của kết cấu dưới tác dụng của trọng tải động [17].
Hình 2.23: Khuyết tật ngậm xỉ
2.4.2.4. Không ngấu
Hàn không ngấu là hiện tượng kim loại mối hàn không ngấm sâu vào bên trong kim loại cơ bản hoặc kim loại mối hàn, khuyết tật này thường gây thay đổi tiết diện của chi tiết hàn, dễ sinh ứng suất và gây nứt và hỏng kết cấu hàn. Hàn không ngấu sinh ra ở góc mối hàn, mép hàn hoặc giữa các lớp hàn.
Nguyên nhân gây ra hàn không ngấu:
- Mép hàn chuẩn bị chưa hợp lý. Góc vát quá nhỏ.
- Dòng điện hàn quá nhỏ hoặc tốc độ hàn quá nhanh.
- Góc độ điện cực hàn (que hàn) và cách đưa điện cực không hợp lý.
- Chiều dài cột hồ quang không quá lớn.
- Điện cực hàn chuyển động không đúng theo trục mối hàn.
2.4.2.5. Chảy loảng
Hình 2.24: Các khuyết tật hàn không thấu
Chảy loảng là hiện tượng kim loại lỏng chảy loảng trên bề mặt của liên kết hàn. Chảy loảng tạo ra sự tập trung ứng suất, làm sai lệch hình dạng của liên kết hàn.
Nguyên nhân gây ra chảy loảng:
- Góc nghiêng que hàn không hợp lý.
- Dòng điện hàn que cao.
- Tư thế hàn và cách đặt vật hàn không hợp lý.
2.5. Các nghiên cứu liên quan đến đề tài
2.5.1. Các nghiên cứu ngoài nước
2.5.1.1. Robot MINI Climber của IMC (International Climbing Machines)
Mục tiêu của những robot này là có thể kiểm tra được hệ thống đập thủy điện, tua-bin gió và tàu ngầm. Các robot mini được sử dụng để chui vào những vùng không gian hẹp để giải quyết các khó khăn mà con người không thể trực tiếp xử lý.
Hình 2.25: Robot MINI Climber
Robot MINI Climber nặng 9 kg, chiều rộng khoảng 35 cm và chiều dài khoảng 38
cm. Robot mang một cánh tay robot.
- Ưu điểm:
Robot này được làm từ sợi carbon và epoxy để giữ trọng lượng ở mức tối thiểu.
Định vị tia laser để loại bỏ những cử động phức tạp trong vùng không gian hạn chế.
- Nhược điểm:
Công nghệ bản quyền.
Chi phí cao.
2.5.1.2. Robot leo tường của đai học Dalhouse
Khoa Cơ Khí - Trường đại học Dalhouse [6] đã nghiên cứu và chế tạo robot leo tường bồn chứa xăng dầu. Robot này có di chuyển trên bề mặt bồn làm bằng thép với
đường kính lớn hơn 15m. Mục đích robot này dùng để kiểm tra đường hàn, khuyết tật
bên trong và độ mòn của bồn chứa xăng dầu.
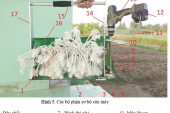
Robot có 2 dây đai, trên mỗi đai có gắn 24 thanh nam châm vĩnh cữu giúp robot bám dính trên bề mặt bồn chứa. Kích thước của mỗi miếng nam châm dài 50.8mm , rộng 12.7 mm và cao 6.4 mm. Robot được thiết kế với khung làm bằng nhôm có chiều dày 3mm, robot nặng 13,6 kg. Tốc độ di chuyển 10 m/phút và sử dụng 2 động cơ Astro flight 940P, 24 Volt, 750 watts.
Hình 2.26: Robot kiểm tra bồn chứa xăng dầu [6]
- Ưu điểm:
Kết cấu đơn giản nhưng kích thước lớn.
Tốc độ di chuyển nhanh.
- Nhược điểm:
Ứng dụng trong nghiên cứu và học tập nhưng chưa ứng dụng trong thực tế.
Công nghệ bản quyền.
2.5.1.3. Robot ScoRpion B-Scan
Robot ScoRpion B-Scan được nghiên cứu và chế tạo bởi hãng Silverwing của Mỹ [19]. Robot có thể di chuyển trên bề mặt bồn chứa xăng dầu làm bằng thép. Robot mang đầu dò siêu âm kiểm tra khuyết tật bên trong bồn chứa. Bốn bánh xe được truyền động bởi 4 động cơ độc lập 12 VDC. Kích thước robot có chiều dài 385mm, chiều rộng
222mm và chiều cao 102mm, nặng 4,74 kg, lực hút nam châm 13,6 kg. Vận tốc
25mm/s và di chuyển với cáp dài 30m.
- Ưu điểm:
Hình 2.27: ScoRpion B-Scan [19]
Di chuyển linh hoạt trên bề mặt bồn.
Thiết kế nhẹ và đẹp.
Tốc độ di chuyển nhanh.
- Nhược điểm:
Chi phí cao.
Công nghệ bản quyền.
Năng suất thấp do diện tích quét nhỏ.
Sử dụng đầu dò chuyên biệt có cấu tạo phức tạp nên khó thay thế.
2.5.1.4.RobotRMS2
Robot RMS2 (Rinaldi Mechatronic Systems) [22] là thiết bị kiểm tra độ ăn mòn của bồn sử dụng phương pháp kiểm tra siêu âm 3 chiều. Dùng chức năng hiển thị C- Scan để xác định chiều dày và đánh giá độ ăn mòn của bồn.
Hình 2.28: Robot RMS2 đang kiểm tra khuyết tật bồn chứa [22]
- Ưu điểm:
Kiểm tra nhanh và tốc độ di chuyển nhanh.
Năng suất kiểm tra cao.
Độ chính xác cao.
- Nhược điểm:
Khó chế tạo và chi phí cao.
Công nghệ bản quyền.
Khối lượng robot lớn và cấu tạo phức tạp.
2.5.1.5. TriPod của công ty Jireh
Công ty Jirech đã nghiên cứu thiết kế và chế tạo robot TriPod [20]. Các bánh xe có gắn các miếng nam châm giúp TriPod di chuyển dễ dàng theo phương thẳng đứng hoặc theo phương ngang trên bề mặt vật liệu làm bằng sắt thép. Đặc biệt, TriPod có thể xoay 3600.
TriPod được sử dụng để kiểm tra chất lượng đường hàn, khuyết tật bên trong vật
liệu, kiểm tra độ ăn mòn của đường ống hay bồn chứa xăng dầu.
TriPod được thiết kế với kích thước dài 450 mm, rộng 394 mm và chiều cao 165 mm, di chuyển với vận tốc có thể thay đổi được từ 0 - 304,8 mm/s, nặng 13,6 kg và điện áp từ 10 VDC - 30 VDC ( 28 VDC khi hoạt động). Lực hút của các bánh xe nam
châm 90,72 kg.
- Ưu điểm:
Hình 2.29: TriPod của công ty Jireh [20]
Thiết kế đơn giản và đẹp.
Tốc độ di chuyển nhanh và linh hoạt.
Năng suất kiểm tra cao.
- Nhược điểm:
Chi phí cao.
Công nghệ bản quyền.
2.5.2. Các nghiên cứu trong nước
Đối với nước ta, robot kiểm tra mòn bồn chứa xăng dầu chưa tìm được các tài liệu liên quan. Liên quan đến lĩnh vực này có một số đề tài về robot leo trường, robot lau kính của một số trường đại học:
- Robot leo tường của sinh viên Đại học Bách Khoa Đà Nẳng [23].
Hình 2.30: Robot leo tường của sinh viên Đại học Bách Khoa Đà Nẳng [23]
Robot dùng hai động cơ điều khiển các bánh xích ở hai bên. Robot được thiết kế nhỏ gọn và dùng cơ cấu hút chân không giúp robot dể dàng bám dính trên trường.
Robot kết cấu đơn giản, di chuyển nhanh, chỉ ứng dụng trong nghiên cứu và học
- Robot leo tường của Học viện Kỹ thuật Quân Sự [24].
Sinh viên Học viện Kỹ thuật Quân Sự đã nghiên cứu chế tạo thành công robot leo
bám tường với mục đích lau dọn nhà cao tầng, kiểm tra vết nứt ở các công trình xây dựng, do thám trong quân sự. Robot này chỉ dừng lại ở việc nghiên cứu trong học tập, chưa ứng dụng được trong thực tế.
Hình 2.31: Robot leo bám tường của Học viện Kỹ Thuật Quân Sự [24].
2.6. Các vấn đề còn tồn tại và định hướng nghiên cứu
Nước ta hiện nay, việc nghiên cứu và chế tạo robot kiểm tra độ mòn bồn chứa chưa được đầu tư vì:
- Thiết bị kiểm tra chi phí cao.
- Công nghệ bản quyền.
- Chi phí lớn cho việc nghiên cứu, thiết kế và chế tạo.
Trong khi đó các nhà máy lọc dầu ngày càng tăng về quy mô và số lượng dẫn đến bồn bể chứa xăng dầu ngày càng nhiều. Để đảm bảo an toàn trong việc lưu trữ xăng dầu nói riêng, đảm bảo an ninh năng lượng quốc gia nói chung thì quá trình kiểm tra, đánh giá chất lượng bồn bể để kịp thời bảo dưỡng trở nên hết sức quan trọng và cấp
thiết.
Từ những hạn chế và tồn tại đã nêu trên, đề tài: Nghiên cứu, thiết kế, chế tạo thử nghiệm robot kiểm tra độ mòn bồn chứa xăng dầu " trở nên cấp thiết. Đề tài hoàn thành tốt sẽ mở rộng và phát triển ứng dụng kiểm tra bồn bể trong ngành dầu khí. Điều này, sẽ giảm chi phí trong việc kiểm tra đánh giá chất lượng bồn bể chứa, giảm chi phí sản xuất và hạ giá thành sản phẩm.
Chương3
CƠ SỞ LÝ THUYẾT
3.1. Các phương pháp kiểm tra không phá hủy
3.1.1. Kiểm tra bằng thị giác và quang học
Phương pháp kiểm tra bằng thị giác và quang học là một trong những phương pháp phổ biến và hiệu quả của phương pháp kiểm tra không phá hủy. Kiểm tra bằng thị giác tức là sử dụng đôi mắt của kỹ thuật viên để tìm khuyết tật trên đối tượng cần kiểm tra. Vì vậy, bề mặt của vật thể kiểm tra cần phải có đủ độ sáng và tầm nhìn của kỹ thuật viên kiểm tra. Kỹ thuật viên có thể sử dụng thiết bị bổ trợ đơn giản như đèn sách tay, kính lúp, gương. Để thực hiện việc kiểm tra từ phía bên trong vật liệu, cần phải có hệ thống các thấu kính ánh sáng như borescopes, cho phép kiểm tra được những bề mặt từ xa. Các hệ thống này được gắn thêm các máy ảnh cho phép ghi nhận lại các kết quả để giữ lại lâu dài. Phương pháp này có thể kiểm tra từ mức độ đơn giản đến phức tạp [2,5].
- Các ứng dụng của phương pháp kiểm tra bằng thị giác và quang học [2]:
Kiểm tra điều kiện bề mặt của vật thể kiểm tra.
Kiểm tra sự liên kết của các vật liệu ở trên bề mặt.
Kiểm tra hình dạng của chi tiết.
Kiểm tra các dấu hiệu rò rỉ.
Kiểm tra các khuyết tật bên trong.