LUẬN VĂN THIẾT KẾ CÁC BỘ ĐIỀU KHIỂN IMC-PID DỰA TRÊN PHƯƠNG PHÁP KHỬ NHIỄU CHO CÁC QUÁ TRÌNH BẬC MỘT CÓ THỜI GIAN TRỄ

NỘI DUNG ĐỒ ÁN
LUẬN VĂN THIẾT KẾ CÁC BỘ ĐIỀU KHIỂN IMC-PID DỰA TRÊN PHƯƠNG PHÁP KHỬ NHIỄU CHO CÁC QUÁ TRÌNH BẬC MỘT CÓ THỜI GIAN TRỄ
TÓM TẮT
THIẾT KẾCÁC BỘ ĐIỀU KHIỂN IMC-PID
DỰA TRÊN PHƯƠNG PHÁP KHỬ NHIỄU CHO
CÁC QUÁ TRÌNH BẬC MỘTCÓ THỜI GIAN TRỄ.
Một phương pháp phân tích mới với bộ điều khiển PID ghép với bộ lọc lead/lag dựa trên cơ sở của mô hình điều khiển lý thuyết nổi tiếng-mô hình điều khiển nội (IMC), được đề xuất cho hệ bậc một với thời gian trễ (FOPDT), bộ điều khiển tích phân với trễ (IPDT), và các quá trình bậc một không ổn định (FOPDT). Phân tích điều chỉnh theo quy luật cho bộ điều khiển PID và bộ lọc được suy ra một cách rõ ràng để làm nổi bật việc khử nhiễu. Một vài nghiên cứu mô phỏng minh họa được tiến hành cho một mảng rộng các quy trình thời gian trễ và kết quả mô phỏng cho thấy rằng: Phương pháp đề xuất có khả năng tốt hơn trong việc đánh giá cho cả khử nhiễu và điểm đặt khi so sánh với các phương pháp thiết kế nổi tiếng gần đây, vì thế các bộ điều khiển trong các nghiên cứu mô phỏng được điều chỉnh để có cùng một mức độ bền vững và độ nhạy tối đa. Để chứng minh sự chắc chắn của các bộ điều khiển, mô hình trong trường hợp xấu nhất không phù hợp được dẫn ra bằng cách chèn nhiễu loạn không ổn định trong tất cả các thông số quá trình cùng một lúc. Kết quả các đặc tính PID xác nhận rằng các bộ điều khiển đề xuất khử nhiễu không ổn định tốt hơn.
Từ khóa: Bộ điều khiển IMC - PID, bộ lọc lead/lag, khử nhiễu, điểm đặt.
ABSTRACT
DESIGN OF IMC-PID CONTROLLERS BASED ON DISTURBANCE REJECTION FOR FIRST-ORDER PROCESSES WITH TIME DELAY
A new analytical method for a proportional-integral-derivative (PID) controller cascaded with a lead/lag filter based on the basis of the renowned internal model control (IMC) theory is proposed for the first-order plus dead time (FOPDT), the integrator plus dead time (IPDT), and the unstable FOPDT processes. Analytical tuning rules for the PID filter controller are derived in the transparent way for enhancing the disturbance rejection. Several illustrative examples are conducted for a broad class of time-delay processes and the simulation results demonstrate that the proposed method affords better performances for both the disturbance rejection and set-point tracking in compared with those of recently well-known design methods, since the controllers in the simulation study are all tuned to have the same degree of robustness in terms of the maximum sensitivity. To demonstrate the robustness of the controllers, the worst-case model mismatch is introduced by inserting perturbation uncertainty in all process parameters simultaneously. The resulting PID characteristics confirm that the proposed controllers hold greater robustness against perturbation uncertainty.
Keywords: IMC-PID controller, Lead/lag filter, Disturbance rejection, Set-point tracking.
MỤC LỤC
Trang bìa phụ...................................................................................................................................
Lý lịch khoa học............................................................................................................................ i
Lời cam đoan ................................................................................................................................ ii
Cảm tạ ................................................................................................................................ iii
Tóm tắt ................................................................................................................................ iv
Mục lục ................................................................................................................................ vi
Danh mục các từ viết tắt............................................................................................................. ix
Danh mục các bảng ..................................................................................................................... x
Danh mục các hình vẽ ............................................................................................................... xi
CHƯƠNG 1: MỞ ĐẦU
1.1. Lý do chọn đề đề tài ........................................................................................................... .1
1.2. Đối tượng nghiên cứu ......................................................................................................... .2
1.3. Phạm vi nghiên cứu.............................................................................................................. 3
1.4. Phương pháp nghiên cứu...................................................................................................... 3
1.5. Ý nghĩa khoa học và thực tiễn của đề tài .......................................................................... 3
CHƯƠNG 2: GIỚI THIỆU CÁC QUÁ TRÌNH ỔN ĐỊNH VÀ
CÓ THỜI GIAN TRỄ................................................................................................................. 4
2.1. Đặc tính động học của các quá trình tiêu biểu .............................................................. 4
2.1.1. Đặc tính thời gian ......................................................................................................... 4
2.1.2. Đặc tính tần số .............................................................................................................. 5
2.2. Các quá trình tiêu biểu ..................................................................................................... 6
2.2.1. Quá trình bậc một không có thời gian trễ ................................................................. 6
2.2.2. Hệ bậc hai không có thời gian trễ .............................................................................. 7
2.2.3. Khâu trễ .......................................................................................................................... 9
2.2.4. Hàm bậc một có thời gian trễ ....................................................................................... 9
2.2.5. Hàm bậc hai có thời gian trễ....................................................................................... 10
CHƯƠNG 3: PHÂN TÍCH CÁC PHƯƠNG PHÁP
ĐIỀU KHIỂN ĐIỂN HÌNH ................................................................................................... 11
3.1. Giới thiệu .......................................................................................................................... 11
3.2. Khảo sát các phương pháp thiết kế bộ điều khiển PID ............................................... 11
3.2.1. Phương pháp của Ziegler - Nichols .......................................................................... 11
3.2.2. Phương pháp của Lee................................................................................................... 14
3.2.3. Phương pháp của Horn................................................................................................ 19
3.2.4. Phương pháp của Rivera ............................................................................................ 24
CHƯƠNG 4: CÁC PHƯƠNG PHÁP THIẾT KẾ PI/PID ĐIỂN HÌNH.......................... 31
4.1. Phương pháp tổng hợp trực tiếp ..................................................................................... 31
4.2. Phương pháp IMC............................................................................................................. 35
4.3. Phương pháp điều chỉnh theo các mối quan hệ............................................................ 38
4.4. Phương pháp điều chỉnh on-line sau khi lắp đặt bộ điều khiển................................. 40
4.5. Phương pháp đáp ứng tần số............................................................................................ 42
4.6. Phương pháp mô phỏng máy tính .................................................................................. 43
CHƯƠNG 5: PHƯƠNG PHÁP THIẾT KẾ BỘ ĐIỀU KHIỂN IMC-PID .................... 44
5.1. Phương pháp xác định bộ điều khiển hồi tiếp lý tưởng................................................. 44
5.2. Thiết kế bộ điều khiển IMC-PID kết hợp bộ lọc bậc thấp ........................................... 47
5.2.1. Mô hình xử lý FOPDT (First Order Plus Dead Time Process)............................... 47
5.2.2. Mô hình quá trình tích phân cộng thời gian trễ IPDT............................................. 49
5.2.3. Mô hình quá trình không ổn định FODUP .............................................................. 50
CHƯƠNG 6: CÁC PHƯƠNG PHÁP ĐÁNH GIÁ
TÍNH ỔN ĐỊNH BỀN VỮNG CỦA BỘ ĐIỀU KHIỂN ..................................................... 51
6.1. Các tiêu chuẩn ổn định điển hình .................................................................................. 51
6.1.1. Tiêu chuẩn ổn định BODE.......................................................................................... 51
6.1.2. Tiêu chuẩn ổn định Nyquist....................................................................................... 53
6.2. Các chỉ tiêu so sánh của đặc tính đầu ra ...................................................................... 54
6.2.1. Các chỉ tiêu chất lượng ............................................................................................... 54
6.2.2. Các tiêu chuẩn tối ưu hóa đáp ứng quá độ .............................................................. 55
6.3. Phương pháp ổn định bền vững theo giá trị Ms (Maximum Sensitivity).................. 57
CHƯƠNG 7: MÔ PHỎNG VÀ PHÂN TÍCH HOẠT ÐỘNG CỦA
CÁC HỆ THỐNG, QUÁ TRÌNH ÐIỀU KHIỂN.................................................................. 59
7.1. Mô phỏng và phân tích quá trình bậc 1 có thời gian trễ (FOPDT).............................. 59
7.2. Quá trình FOPDT bởi nghiên cứu của Lee et al.............................................................. 61
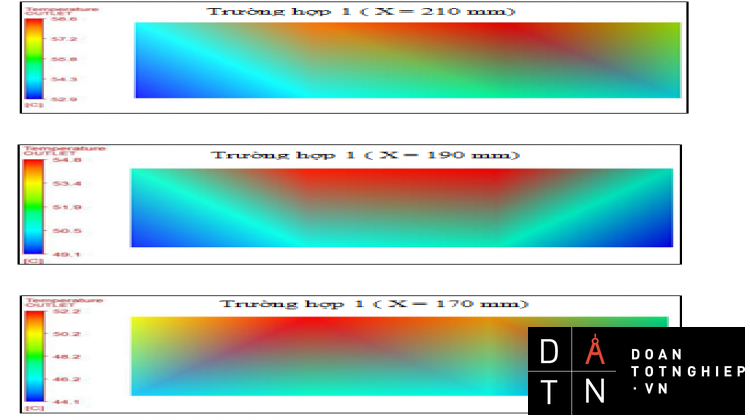
7.3. Mô hình tháp chưng cất .................................................................................................... 63
7.4. Các quá trình không ổn định FODUP.............................................................................. 65
CHƯƠNG 8: KẾT LUẬN ....................................................................................................... 68
TÀI LIỆU THAM KHẢO........................................................................................................ 69
DANH MỤC CÁC TỪ VIẾT TẮT
FOPDT : First Order Plus Dead Time
FODIP : First-Order Delayed Integrating Process
FODUP : First-Order Delayed Unstable Process
IAE : Integral of the Absolute Error
IE : Intergal Error
ISE : Intergral Square Error
IMC : Internal Model Control
IPDT : Integrator Plus Dead Time
ITAE : Integral of the Time weighted Absolute Error
Ms : Maximum Sensitivity
PID : Proportional- Integral- Derivative
POT : Percent Overshoot
SOPDT : Second-Order Plus Dead-Time Process
SODUP : Second-Order Delayed Unstable Process
TV : Total Variation
DANH MỤC CÁC BẢNG
BẢNG Trang
Bảng 3.1. Bảng thông số cho bộ điều khiển Ziegler- Nichols.................................... 13
Bảng 3.2. Xác định thông số bộ điều khiển Ziegler- Nichols..................................... 14
Bảng 3.3. Các quy tắc điều chỉnh IMC- PID cho các mô hình FOPDT và SOPDT.. 17
Bảng 3.4. Quy tắc điều chỉnh IMC- PID cho các quá trình phức tạp khác nhau..... 18
Bảng 3.5. Quy tắc điều chỉnh IMC- PID cho các quá trình FODUP và SODUP....... 19
Bảng 3.6. Quy tắc điều chỉnh IMC- PID cho các hệ thống điều khiển bậc............... 19
Bảng 3.7. Các bộ điều khiển IMC cho các quá trình với đáp ứng vòng hở chậm hơn đáp ứng vòng kín ()................................................................................................................................. 23
Bảng 3.8. Thông số điều khiển đối với hệ bậc một có thời gian trễ.......................... 28
Bảng 3.9. Các thông số bộ điều khiển PID theo Rivera............................................... 30
Bảng 4.1. Thiết lập bộ điều khiển PID dựa trên IMC cho Gc(s) (Chien và Fruehauf, 1990). 39
Bảng 4.2. Thiết lập bộ điều khiển PID tương đương giữa dạng nối tiếp và song song40
Bảng 4.3. Thiết lập bộ điều khiển dựa trên phương pháp CC..................................... 41
Bảng 7.1. Thông số bộ điều khiển PID........................................................................... 61
Bảng 7.2. Phân tích độ ổn định....................................................................................... 61
Bảng 7.3. Thông số bộ điều khiển PID và ma trận thực hiện ..................................... 62
Bảng 7.4. Phân tích độ ổn định....................................................................................... 63
Bảng 7.5. Thông số bộ điều khiển PID........................................................................... 64
Bảng 7.6. Phân tích độ ổn định....................................................................................... 64
Bảng 7.7 Thông số bộ điều khiển PID............................................................................ 66
Bảng 7.8. Phân tích độ ổn định....................................................................................... 66
DANH MỤC CÁC HÌNH VẼ
HÌNH Trang
Hình 3.1. Xác định tham số cho mô hình xấp xỉ bậc nhất có trễ .............................. 12
Hình 3.2. Xác định hệ số khuếch đại tới hạn................................................................ 14
Hình 3.3. Sơ đồ hệ thống điều khiển hồi tiếp............................................................... 15
Hình 3.4. Sơ đồ cấu trúc điều khiển hồi tiếp vòng đơn cổ điển................................. 19
Hình 3.5. Sơ đồ cấu trúc IMC.......................................................................................... 24
Hình 4.1. Sơ đồ khối của hệ thống điều khiển hồi tiếp............................................... 32
Hình 4.2a. Sơ đồ cấu trúc hệ thống điều khiển hồi tiếp cổ điển................................ 35
Hình 4.2b. Sơ đồ cấu trúc hệ thống điều khiển IMC.................................................... 36
Hình 4.3. Đồ thị thực nghiệm KCu................................................................................... 41
Hình 4.4. Sơ đồ khối với nhiễu D và tiếng ồn N........................................................... 43
Hình 5.1a. Sơ đồ khối của chiến lược điều khiển hồi tiếp cổ điển............................ 44
Hình 5.1b. Sơ đồ khối của chiến lược điều khiển hồi tiếp mô hình điều khiển nội IMC 44
Hình 6.1. Biểu đồ Bode với nhiều tần số giới hạn....................................................... 52
Hình 6.2. Sơ đồ dao động duy trì liên tục trong một hệ thống điều khiển hồi tiếp. 53
Hình 6.3. Biểu diễn giá trị Ms......................................................................................... 57
Hình 7.1. Kết quả mô phỏng bộ điều khiển PID........................................................... 59
Hình 7.2. Kết quả mô phỏng bộ điều khiển PID........................................................... 62
Hình 7.3. Kết quả mô phỏng bộ điều khiển PID........................................................... 64
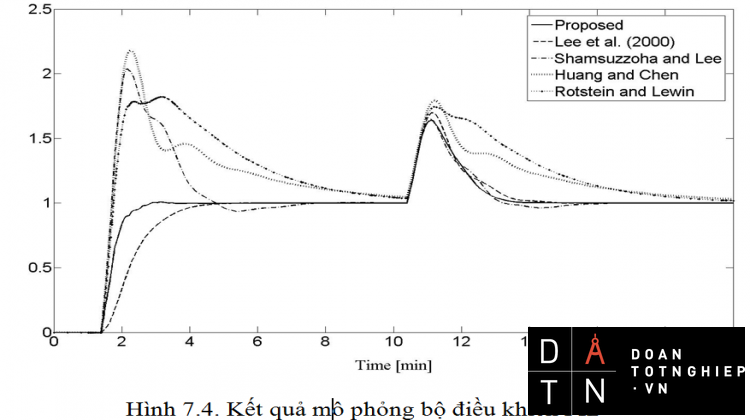
Hình 7.4. Kết quả mô phỏng bộ điều khiển PID .......................................................... 67
CHƯƠNG 1
MỞ ĐẦU
1.1. Lý do chọn đề tài:
Mặc dù đã có nhiều báo cáo về kỹ thuật điều khiển tiên tiến trong các tài liệu lớn, nhưng cấu trúc IMC, cấu trúc điều khiển có chứa mô hình nội của thiết bị đã được trình bày bởi Garcia và Morari1, vẫn là một trong những mô hình điều khiển được sử dụng rộng rãi nhất trong các ngành công nghiệp, do sự đơn giản, linh hoạt và khả năng tiếp cận của nó. Vì vậy, một số viện và kỹ sư điều khiển tự động2 -13,16 đã sử dụng nguyên tắc IMC để thiết kế bộ điều khiển PID, mà thường được gọi là bộ điều khiển PID - IMC.
Lợi thế quan trọng nhất của quy tắc điều chỉnh IMC - PID là sự cân bằng giữa hiệu suất mạch kín và độ ổn định, có thể đạt được trực tiếp bằng cách sử dụng một thông số điều chỉnh duy nhất, có liên quan đến hằng số thời gian vòng lặp kín. Hơn nữa, các quy tắc điều chỉnh IMC - PID đã được chứng minh là tốt hơn với điểm đặt nhưng loại bỏ nhiễu chậm, và chính điều này sẽ trở nên xấu đi cho quá trình xử lý với một tỉ lệ nhỏ thời gian trễ/ hằng số thời gian3,4,7 -13. Tuy nhiên, cần lưu ý rằng khử nhiễu là quan trọng hơn việc theo dõi điểm thiết lập đầu vào, cho nhiều ứng dụng điều khiển quá trình. Và do đó, nó đã trở thành một vấn đề cấp thiết đối với nhiều nhà nghiên cứu.
Chen và Seborg14 chứng minh rằng bộ cộng trực tiếp có thể khử nhiễu. Trong đó, các tham số bộ điều khiển PID thu được bằng cách tính toán bộ điều khiển phản hồi lý tưởng, cho bởi đáp ứng vòng lặp kín. Bên cạnh đó, cần nhấn mạnh rằng mô hình điều khiển 2 bậc tự do có thể được sử dụng để cải thiện hiệu suất khử nhiễu cho các quá trình có thời gian trễ khác nhau8,9,12,13. Trong trường hợp này, phương pháp của Lee et al.8 là một ví dụ điển hình của việc áp dụng các mô hình điều khiển này. Các bộ lọc IMC bao gồm một quy tắc dẫn đến việc bỏ qua chi phối quá trình được đề xuất bởi Horn et al.7. Hơn nữa, hiệu suất điều khiển có thể được tăng cường đáng kể bằng cách sử dụng bộ điều khiển PID ghép tầng với các bộ lọc thông thường, và có thể dễ dàng thực hiện trong phần cứng điều khiển hiện đại. Do đó, một số bộ điều khiển điều chỉnh thông thường2,3,7,8,12 đã được giới thiệu mặc dù phức tạp hơn so với bộ điều khiển PID với quá trình có thời gian trễ. Tuy nhiên, khó khăn này có thể dễ dàng khắc phục bằng cách sử dụng một số xấp xỉ thông minh cho phần thời gian trễ trong việc mô hình quá trình.
Nhìn chung, thiết kế bộ điều khiển PID - IMC đã được thảo luận thường xuyên trong các tài liệu rất lớn, nhưng việc thiết kế một bộ điều khiển đơn giản và hiệu quả với sự cải thiện hoàn hảo về hiệu suất đã không đủ thỏa mãn cho một loạt các quá trình có thời gian trễ. Hơn nữa, một số bộ điều khiển có thể cung cấp đáp ứng điểm đặt tốt nhưng khử nhiễu kém hoặc ngược lại. Vì vậy, nghiên cứu này tập trung vào việc thiết kế các bộ điều khiển PID theo tầng với bộ lọc đầu vào để thực hiện các mục đích điều khiển khác nhau: Các quy tắc điều khiển cần được đơn giản, hình thức phân tích, dựa trên mô hình, và dễ dàng để thực hiện trong thực tế với hiệu suất cao cho những vấn đề điều khiển và cả vấn đề phụ.
Một số nghiên cứu đã được thực hiện để chứng minh sự đơn giản và hiệu quả của các phương pháp được đề xuất nhằm so sánh với một số phương pháp thiết kế nổi bật, vì những bộ điều khiển được điều chỉnh để có mức độ vững vàng cùng giá trị độ nhạy cực đại (Ms). Kết quả mô phỏng xác nhận rằng phương pháp đề xuất có thể đủ khả năng điều khiển PID mạnh mẽ cho cả khử nhiễu và theo dõi điểm đặt đầu vào.
1.2. Đối tượng nghiên cứu
Trong nghiên cứu này, bộ điều khiển PID kết hợp với bộ lọc được xác định xấp xỉ với bộ điều khiển phản hồi lý tuởng, thu đuợc bằng cách sử dụng trực tiếp xấp xỉ Padé bậc cao, trong khi những nghiên cứu truớc đây chỉ gián tiếp sử dụng xấp xỉ Pade về phần thời gian trễ. Nghiên cứu này đuợc tập trung vào việc thiết kế các bộ điều khiển PID kết nối với một bộ lọc tiêu chuẩn, để thực hiện mục đích điều khiển khác nhau. Quy tắc điều chỉnh đơn giản, dựa trên mô hình và dễ dàng ứng dụng trong thực tế với hiệu suất cao.
1.3. Phạm vi nghiên cứu
Nghiên cứu này được thực hiện nhằm đề xuất phương pháp hợp nhất để điều khiển các quá trình công nghiệp có thời gian trễ. Bằng việc thiết kế hệ thống điều khiển, thiết kế bộ điều khiển PID kết hợp với bộ lọc IMC, nhằm tăng cường hiệu suất làm việc, độ an toàn trong vận hành hệ thống, quá trìng công nghiệp.
Nhiều ứng dụng được nghiên cứu để chứng minh sự đơn giản và hiệu quả của phương pháp được đề xuất so với một số phương pháp thiết kế nổi tiếng khác. Kết quả mô phỏng xác nhận rằng phương pháp đề nghị có thể đủ khả năng tạo sự ổn định cho bộ điều khiển PID.
1.4. Phương pháp nghiên cứu
- Xác định bộ điều khiển hồi tiếp lý tưởng.
- Thiết kế bộ điều khiển IMC-PID kết hợp với bộ lọc bậc thấp.
- Mô phỏng, đánh giá kết quả.
1.5. Ý nghĩa khoa học và thực tiễn của đề tài
Hiện nay có nhiều phương pháp thiết kế bộ diều khiển PID khác nhau được đề xuất bởi rất nhiều nhà nghiên cứu trên thế giới. Tuy nhiên, chưa có các phương pháp hợp nhất để thiết kế bộ điều khiển dùng cho tất cả các quá trình trong công nghiệp có thời gian trễ với tính vượt trội về hiệu quả hoạt động. Chính vì vậy, thiết kế bộ điều khiển PID cao cấp, hợp nhất để sử dụng cho tất cả các qui trình công nghiệp mang một ý nghĩa hết sức quan trọng trong thời điểm hiện tại.
Tại Việt Nam, việc nghiên cứu bộ điều khiển PID đã được quan tâm nhiều do nhu cầu cấp thiết trong việc áp dụng vào thực tế sản xuất tại nhiều nhà máy, xí nghiệp trong nước. Đặc biệt là các nhà máy, xí nghiệp tách, lọc, chiết suất dầu khí và các sản phẩm có liên quan.
CHƯƠNG 2
GIỚI THIỆU CÁC QUÁ TRÌNH ỔN ĐỊNH VÀ CÓ THỜI GIAN TRỄ
2.1. Đặc tính động học của các quá trình tiêu biểu
Đặc tính động học của hệ thống mô tả sự thay đổi tín hiệu ở đầu ra của hệ thống theo thời gian khi có tác động ở đầu vào. Trong thực tế, các hệ thống điều khiển rất đa dạng, tuy nhiên những hệ thống được mô tả bằng mô hình toán học có dạng như nhau sẽ có đặc tính động học như nhau. Để khảo sát đặc tính động của hệ thống, tín hiệu vào thường được chọn là tín hiệu cơ bản như hàm xung đơn vị, hàm nấc đơn vị hay hàm điều hòa.
2.1.
- 1.1. Đặc tính thời gian
Đặc tính thời gian của hệ thống mô tả sự thay đổi tín hiệu ở đầu ra của hệ thống khi tín hiệu vào là hàm xung đơn vị hay hàm nấc đơn vị.
Nếu tín hiệu vào là hàm xung đơn vị r(t)=d(t) thì đáp ứng của hệ thống là :
C(s) = R(s).G(s)=G(s) (do R(s)=1) (2.1) Þ c(t) = L-1{C(s)} = L-1{G(s)} = g(t) (2.2)
g(t) được gọi là đáp ứng xung hay còn gọi là hàm trọng lượng của hệ thống.
Vậy đáp ứng xung là đáp ứng của hệ thống khi tín hiệu vào là hàm xung đơn vị. Theo công thức (2.2) đáp ứng xung chính là biến đổi Laplace ngược của hàm truyền. Nếu tín hiệu vào là hàm nấc đơn vị r(t)=1(t) thì đáp ứng của hệ thống là:
(do ) (2.3)
(2.4)
Biểu thức (2.4) có được do áp dụng tính chất ảnh tích phân của phép biến đổi Laplace.
Đặt:
(2.5)
được gọi là đáp ứng nấc hay còn gọi là hàm quá độ của hệ thống.
Vậy đáp ứng nấc là đáp ứng của hệ thống khi tín hiệu vào là hàm nấc đơn vị. Theo biểu thức (2.5) đáp ứng nấc chính là tích phân của đáp ứng xung.
2.1.2. Đặc tính tần số
Đặc tính tần số của hệ thống tuyến tính liên tục mô tả quan hệ giữa tín hiệu ra và tín hiệu vào của hệ thống ở trạng thái xác lập khi thay đổi tần số của tín hiệu dao động điều hòa tác động ở đầu vào của hệ thống.
Định nghĩa: Đặc tính tần số của hệ thống là tỉ số giữa tín hiệu ra ở trạng thái xác lập và tín hiệu vào hình sin.
Đặc tính tần số = (2.6)
Để biểu diễn đặc tính tần số một cách trực quan, ta có thể dùng đồ thị. Có hai dạng đồ thị thường được sử dụng là biểu đồ Bode và biểu đồ Nyquist.
- Biểu đồ Bode:
Gồm hai thành phần:
Biểu đồ Bode biên độ: đồ thị biểu diễn mối quan hệ giữa logarith của đáp ứng biên độ theo tần số .
(2.7)
- đáp ứng biên độ tính theo đơn vị dB (decibel).
Biểu đồ Bode pha: đồ thị biểu diễn mối quan hệ giữa đáp ứng pha theo tần số .
- Biểu đồ Nyquist: (đường cong Nyquist)
Là đồ thị biểu diễn đặc tính tần số trong hệ tọa độ cực khi thay đổi từ . Nói cách khác đường cong Nyquist chính là tập hợp tất cả các điểm ngọn của vector biểu diễn số phức .
Mặc dù biểu diễn dưới hai dạng đồ thị khác nhau nhưng thông tin có được về hệ thống từ biểu đồ Bode và biểu đồ Nyquist là như nhau. Từ biểu đồ Bode ta có thể suy ra được biểu đồ Nyquist và ngược lại.
3
3.1
2
2.1
2.2. Các quá trình tiêu biểu
2.2.1. Quá trình bậc một không có thời gian trễ
Hàm truyền: (2.8)
Thông số đặc trưng : K là hệ số khuếch đại
τ là hằng số thời gian của hệ.
Đặc tính thời gian:
Hàm quá độ :
Từ ảnh Laplace của đáp ứng:
(2.9)
Ta có hàm quá độ:
(2.10)
Nhận xét:
Nếu gọi giá trị xác lập của là: (2.11)
Tại t=τ ta có: (2.12)
Tức là thời điểm t = τ, tín hiệu ra được 63,2% giá trị xác lập(ổn định)
Tương tự ta có:
Ta thấy hằng số thời gian τ đặc trưng cho mức độ đáp ứng nhanh hay chậm của hệ thống. Hệ có τ nhỏ sẽ nhanh chóng đạt đến trạng thái ổn định, ngược lại τ lớn thì hệ cần nhiều thời gian mới đạt đến trạng thái ổn định.
Hàm trọng lượng nhận được bằng cách lấy đạo hàm của hàm quá độ:
(2.13)
Đặc tính tần số
Hàm truyền tần số: (2.14)
Nhân tử và mẫu với , ta được:
(2.15)
Biên độ: (2.16)
Góc pha: (2.17)
Biên độ logarit: (2.18)
2.2.2. Hệ bậc hai không có thời gian trễ
Hàm truyền: (2.19)
Trong đó: τ: hằng số thời gian
: hệ số khuếch đại
: hệ số tắt dần
Đặc tính thời gian:
Xét phương trình đặc tính: (2.20)
Biệt số: (2.21)
Ta phân biệt hai trường hợp:
- Khi , hệ được gọi là hệ quán tính bậc hai.
- Khi , hệ được gọi là hệ dao động bậc hai.
- Hệ quán tính bậc hai.
- Khi , phương trình đặc tính có hai nghiệm thực phân biệt. Nếu ký hiệu hai nghiệm này là và ,ta sẽ có:
và (2.22)
(2.23)
Do đó hệ quán tính bậc hai tương đương với khâu quán tính bậc nhất ghép nối tiếp có các hằng số thời gian và .
(2.24)
Hàm quá độ: (2.25)
Hàm trọng lượng: (2.26)
- Khi , phương trình đặc tính có nghiệm kép
Hàm quá độ: (2.27)
Hàm trọng lượng: (2.28)
- Hệ dao động bậc hai
- Khi : Phương trình đặc tính có hai nghiệm phức.
Với ký hiệu ta có:
Hàm truyền: (2.29)
(2.30)
Hàm trọng lượng:
(2.31)
Các biểu thức trên cho thấy đặc tính thời gian của khâu dao động bậc hai có dạng dao động tắt dần. Hàm quá độ suy giảm về giá trị xác lập K và hàm trọng lượng suy giảm về 0. Giá trị càng lớn, dao động tắt dần càng nhanh, do đó gọi là hệ số suy giảm hay hệ số tắt dần.
- Khi thì , đáp ứng của hệ là dao động không đổi với tần số . Do đó gọi là tần số riêng của hệ dao động bậc hai.
Nếu khảo sát mở rộng với thì đáp ứng sẽ có dạng dao động tăng dần, nên khi hệ bậc hai không ổn định.
Khảo sát trong miền tần số.
Hàm truyền tần số của hệ bậc hai.
(2.32)
Tách phần thực và phần ảo ta được:
(2.33)
Biên độ: (2.34)
(2.35)
Góc pha: (2.36)
2.2.3. Khâu trễ
Khâu trễ là khâu động học mà sau một khoảng thời gian xác định, lượng ra lập lại lượng vào mà không bị méo tín hiệu.
Mô tả toán:
Làm trễ hàm tín hiệu vào u(t) một khoảng thời gian τ ta được tín hiệu ra:
(2.38)
Biến đổi Laplace hàm trễ ta được:
(2.39)
Hàm truyền: (2.40)
Đặc tính thời gian
Hàm quá độ: (2.41)
Hàm trọng lượng: (2.42)
Đặc tính tần số:
Hàm truyền tần số: (2.43)
Biên độ: (2.44)
Biên độ logarit: dB (2.45)
Góc pha: (2.46)
2.2.4. Hàm bậc một có thời gian trễ
Hàm truyền: (2.47)
Đặc tính thời gian:
Hàm quá độ: (2.48)
Hàm trọng lượng: (2.49)
Đặc tính tần số của hệ bậc một có thời gian trễ gồm biên độ và không thay đổi so với đặc tính tần số của hệ bậc hai không có thời gian trễ mà chỉ thêm góc lệch pha .
2.2.5. Hàm bậc hai có thời gian trễ
Hàm truyền: G (2.50)
Đặc tính thời gian: Hàm quá độ h(t-τ) với h(t) là hàm quá độ của hệ bậc 2 không có thời gian trễ.
Đặc tính tần số xác định tương tự như đối với hệ bậc 1 có thời gian trễ.
..................................
Hình 7.4. Kết quả mô phỏng bộ điều khiển PID
Để đánh giá sự ổn định của các bộ điều khiển, nhiễu không chắc chắn khoảng ±20% được chèn trong tất cả ba thông số quá trình cùng lúc. Kết quả mô phỏng cho thấy bộ điều khiển PID đề xuất cung cấp hiệu quả mạnh mẽ hơn cả cho việc khử nhiễu và điểm đặt khi so sánh với phương pháp của Lee et al.9, Shamsuzzoha và Lee13, của Huang và Chen6. Vì giá trị Ms khác nhau trong trường hợp danh nghĩa, rất khó để có được một so sánh công bằng với các phương pháp của Rotstein và Lewin5 . Trong trường hợp này, người nghiên cứu điều chỉnh các giá trị để có được Ms = 2.48 cho các phương pháp được đề xuất, mà là giống như của phương pháp Rotstein và Lewin5. Kết quả mô phỏng cũng chứng minh hiệu suất cao của bộ điều khiển đề xuất cho nhiễu cũng như những thay đổi điểm thiết lập đầu vào.
CHƯƠNG 8
KẾT LUẬN
Các phương pháp thiết kế phân tích cho bộ điều khiển PID ghép nối tiếp với bộ lọc đã được đề xuất cho một loạt các quá trình bậc một với thời gian trễ FOPDT, DIP, và các mô hình quá trình bậc một không ổn định FODUP. Trên cơ sở của lý thuyết bộ IMC nổi tiếng, bộ điều khiển đề xuất có thể cải thiện tuyệt vời về hiệu suất cho việc khử nhiễu. Để tăng cường đáp ứng điểm đặt, các phương pháp được đề xuất cũng sử dụng một bộ lọc điểm đặt như bộ điều khiển đã được giới thiệu bởi một số tác giả đề cập ở trên.
Kết quả mô phỏng cho thấy phương pháp đề xuất luôn dành hiệu suất cao hơn với một đáp ứng nhanh chóng và cân bằng với thời gian vòng kín cho cả khử nhiễu và theo dõi điểm thiết lập đầu vào trong việc so sánh với các phương pháp khác, khi các bộ điều khiển khác nhau được điều chỉnh để có cùng một mức độ mạnh mẽ về giá trị đỉnh của chức năng độ nhạy.
Nghiên cứu độ ổn định cũng được tiến hành bằng cách chèn một nhiễu không chắc chắn khoảng ± 20% trong tất cả ba thông số quá trình cùng một lúc. Kết quả cho thấy các hệ thống điều khiển đề xuất ổn định về độ mạnh trong cả trường hợp danh nghĩa và các trường hợp mô hình xây dựng không phù hợp.