ĐỒ ÁN TỐT NGHIỆP ĐIỆN Thiết Kế và Thi Công Mô Hình Mạch Bảo Vệ Và Điều Khiển Động Cơ Bơm Nước
NỘI DUNG ĐỒ ÁN
Mục Lục ĐỒ ÁN TỐT NGHIỆP ĐIỆN Thiết Kế và Thi Côn Mạch Bảo Vệ Và Điều Khiển Động Cơ Bơm Nước
Lời Cảm Ơn. 1
Mục Lục. 1
Danh Sách Các Hình. 3
Danh Sách Các Bảng. 5
Các Từ Viết Tắt6
Các Ký Hiệu. 7
Tóm Tắt8
Chương 1 Giới thiệu. 10
1.1. Tổng quan về đề tài10
1.2. Mục tiêu của đề tài10
1.3. Cấu trúc của quyển đồ án. 11
Chương 2 Cơ sở lý thuyết13
2.1. Vi điều khiển pic16F877A.. 13
2.1.1. Một vài thông số của vi điều khiển pic 16F877A.. 13
2.1.2. Sơ đồ chân của vi điều khiển pic 16F877A.. 15
2.1.3. Timer1. 17
2.2. Cảm biến dòng LCTA21CE.. 17
2.3. Núm vặn encoder ALPSEC11. 20
2.4. Ic ổn áp. 21
Chương 3 Thiết kế sơ đồ khối và thi công. 22
3.1. Sơ đồ khối tổng quát hệ thống. 22
3.2. Giải thích sơ đồ khối22
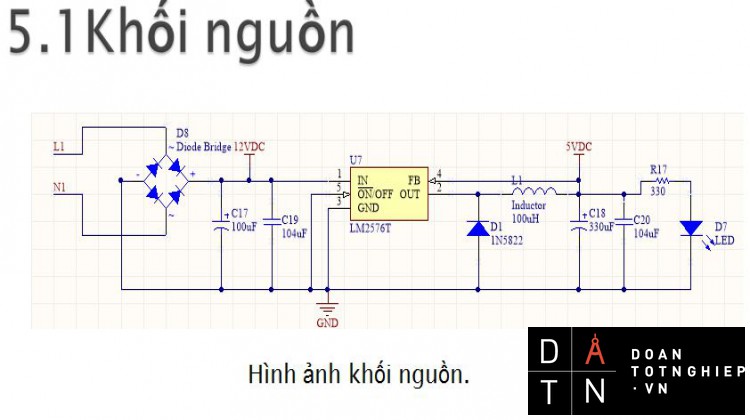
3.2.1. Khối nguồn. 22
3.2.2. Khối xử lý trung tâm.. 23
3.2.3. Khối công suất kích (relay-contactor)24
3.2.4. Khối báo hiệu. 25
3.2.5. Khối cài đặt26
3.2.6. Khối đo dòng điện AC.. 27
3.2.7. Khối hiển thị (LCD)27
3.3. Mạch nguyên lý. 30
Chương 4 Viết chương trình vi xử lý. 31
4.1. Lưu đồ thuật giải31
4.1.1. Lưu đồ thuật giải chương trình chính. 31
4.1.2. Lưu đồ thuật giải chương trình con void interrupt_timer1. 31
4.1.3. Lưu đồ thuật giải chương trình con void doc_adc. 33
4.1.4. Lưu đồ thuật giải chương trình con void nn_luu. 33
4.1.5. Lưu đồ thuật giải chương trình con void nn_tang. 34
4.1.6. Lưu đồ thuật giải chương trình con void nn_giam.. 35
4.1.7. Lưu đồ thuật giải chương trình con void kiem_tra_tac_dong. 36
4.1.8. Lưu đồ thuật giải chương trình con void kiem_tra_tgian_chay. 37
4.1.9. Lưu đồ thuật giải chương trình con void nhap_nhay. 38
4.2. Chương trình ccs. 39
Chương 5 Kết quả đạt được và hướng phát triển. 51
5.1. Kết quả đạt được. 51
5.2. Vận hành mô hình. 51
5.3. Một số hạn chế. 53
5.4. Hướng phát triển. 53
Tài Liệu Tham Khảo. 55
Danh Sách Các Hình
Hình 2.1: Vi điều khiển pic 16F877A.13
Hình 2.2: Vi điều khiển pic 16F877A.15
Hình 2.3: Cảm biến dòng LCTA21CE.18
Hình 2. 4: Sơ đồ chân cảm biến dòng LCTA21CE.18
Hình 2. 5: Lấy mẫu điện áp thu được bằng cách sử dụng một điện trở mắc với cuộn thứ cấp.19
Hình 2.6: Lấy mẫu điện áp thu được bằng cách sử dụng một con IC mắc với cuộn thứ cấp.19
Hình 2.7: Núm vặn encoder ALPSEC11.20
Hình 2.8: Sơ đồ chân núm vặn encoder ALPSEC11.20
Hình 3.1: Sơ đồ khối tổng quát hệ thống.22
Hình 3.2: Khối nguồn.23
Hình 3.3: Khối xử lý trung tâm.24
Hình 3.4: Khối công suất kích (relay-contactor).25
Hình 3.5: Khối báo hiệu.25
Hình 3.6: Khối cài đặt.26
Hình 3.7: Khối đo dòng điện AC.27
Hình 3.8: Khối hiển thị (LCD).28
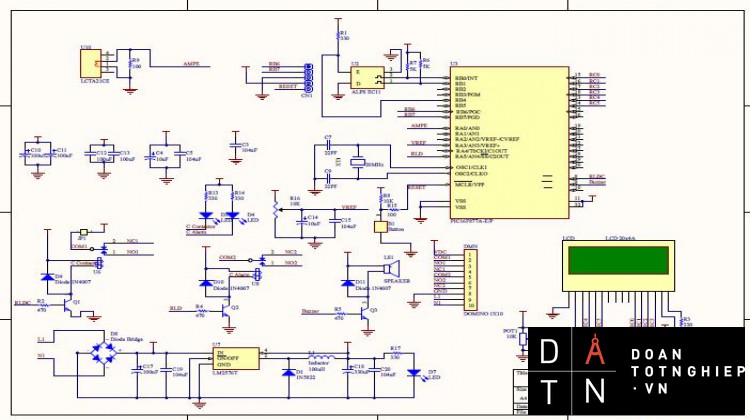
Hình 3.9: Mạch nguyên lý.30
Hình 4.1: Lưu đồ thuật giải chương trình chính.31
Hình 4.2:Chương trình con void interrupt_timer1.32
Hình 4.3: Lưu đồ thuật giải chương trình con void doc_adc.33
Hình 4.4: Lưu đồ thuật giải chương trình con void nn_luu.34
Hình 4.5: Lưu đồ thuật giải chương trình con void nn_tang.35
Hình 4.6: Lưu đồ thuật giải chương trình con void nn_giam.36
Hình 4.7: Lưu đồ thuật giải chương trình con void kiem_tra_tac_dong.37
Hình 4.9: Lưu đồ thuật giải chương trình con void nhap_nhay.39
Hình 5. 1: Mạch bảo vệ và điều khiển động cơ bơm nước.52
Hình 5. 2: Hiển thị các thông số đã cài đặt.53
Danh Sách Các Bảng
Bảng 1. 1: Kế hoạch thực hiện. 12
Bảng 3. 1: Chức năng các chân LCD 20X4.28
Bảng 5. 1: Bảng chi tiết vật tư.56
Các Từ Viết Tắt
VXL Vi xử lý
NC1 Thuờng đóng
NO1 Thường mở
NC2 Thường đóng
NO2 Thường mở
RLĐC Relay động cơ
RLĐ Relay đèn
Buzzer Loa
LCD Màn hình tinh thể lỏng
DONG DIEN Dòng điện
Imin Dòng điện nhỏ nhất
Imax Dòng điện lớn nhất
TG TAC DONG Thời gian tác động
TG CHAY Thời gian chạy
Các Ký Hiệu
Ký hiệu Ý nghĩa Đơn vị
Vcc Điện áp vào mạch (+) V
R Điện trở W
L Cuộn cảm H
C Điện dung F
Vref Điện áp tham chiếu V
Thiết Kế và Thi Công Mô Hình Mạch Bảo Vệ Và Điều Khiển Đông Cơ Bơm Nước
Ngành Công Nghệ Kỹ Thuật Điều Khiển và Tự Động Hóa
Khoa Điện-Điện Lạnh
Trường Cao Đẳng Kỹ Thuật Cao Thắng
Tóm Tắt
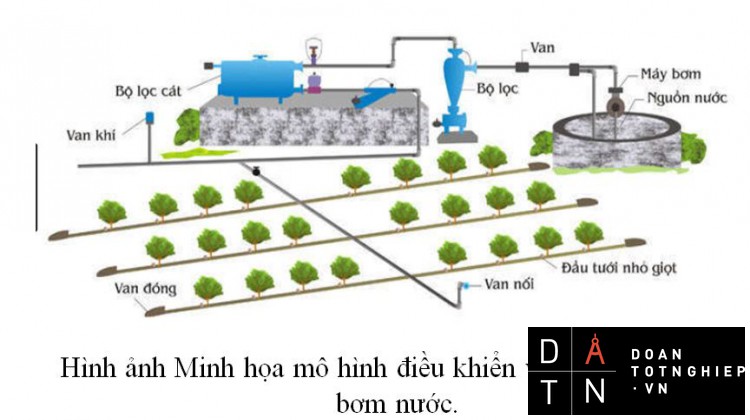
Trong giai đoạn hội nhập, việc ứng dụng công nghệ tự động hoá vào các lĩnh vực nông nghiệp và công nghiêp để tăng năng suất, sản lượng, tiết kiệm nhân công và chi phí sản xuất. Cụ thể trong đề tài “MẠCH BẢO VỆ VÀ ĐIỀU KHIỂN ĐỘNG CƠ BƠM NƯỚC”. Nhằm phát huy các khả năng mà vi xử lý có thể làm được, cụ thể là trong nông nghiệp, ứng dụng trong việc bảo vệ và điều khiển động cơ bơm khi tưới nước cho cây trồng. Trong trường hợp khi mà động cơ hút nước từ giếng khoang lên, để truyền nước đến các cây cần tới, trong quá trình hút nước, thì có 3 trường hợp xảy ra:
Trường hợp 1 động cơ bơm hút thiếu nước, khi đó dòng điện thực đo được thông qua cảm biến dòng LCTA21CE nhỏ hơn dòng điện cài đặt Imin, thì khối xử lý trung tâm, xử lý tín hiệu và điều khiển cuộn coil relay (U6) để ngắt động cơ thông qua contactor. Đồng thời điều khiển cuộn coil relay (U8) để bật đèn vàng sáng và loa kêu, để báo sự cố xảy ra. Sau một khoản thời gian cài đặt tác động thì thời gian chạy sẻ ngưng đếm.
Trường hợp 2 động cơ bơm hút đủ nước, khi đó dòng điện thực đo được thông qua cảm biến dòng LCTA21CE sẻ lớn hơn dòng cài đặt Imin và nhỏ hơn dòng cài đặt Imax, thì khối xử lý trung tâm, xử lý tín hiệu và điều khiển cuộn coil relay (U6) để đóng động cơ thông qua contactor. Đồng thời bật đèn xanh sáng, để báo hiệu động cơ đang hoạt động và thời gian chạy bất đầu đếm xuống.
Trường hợp 3 động cơ bơm hút nhiều nước quá, khi đó dòng điện thực đo được thông qua cảm biến dòng LCTA21CE sẻ lớn hơn dòng cài đặt Imax, thì khối xử lý trung tâm, xử lý tín hiệu và thời gian cài đặt tác động đếm xuống về không. Sau đó điều khiển cuộn coil relay (U6) ngắt động cơ thông qua contactor, đồng thời bật đèn vàng sáng, để báo sự cố xảy ra và ngưng đếm thời gian chạy.
Trong đồ án này, phương pháp điều khiển như đọc ADC, để đo dòng điện động cơ bơm nước.
Kết quả đạt được là hoàn thiện mô hình “ MẠCH BẢO VỆ VÀ ĐIỀU KHIỂN ĐỘNG CƠ BƠM NƯỚC”, hoạt động theo ý muốn của người sử dụng.
Chương 1 Giới thiệu
1.1. Tổng quan về đề tài
Ngày nay kỹ thuật vi điều khiển đã trở nên quen thuộc trong các ngành kỹ thuật và trong dân dụng. Từ các dây chuyền sản xuất lớn đến các thiết bị gia dụng, chúng ta đều thấy sự hiện diện của vi điều khiển. Các bộ vi điều khiển có khả năng xử lý nhiều hoạt động phức tạp mà chỉ cần một chip vi mạch nhỏ, nó đã thay thế các tủ điều khiển lớn và phức tạp bằng những mạch điện gọn nhẹ, dễ dàng thao tác sử dụng.
Với sự phát triển mạnh mẽ của khoa học máy tính và điện tử đã hỗ trợ rất lớn đến sự ra đời và phát triển của công nghệ tự động. Công cuộc tự động hóa đã tạo ra một bước ngoặt trong quá trình sản xuất cũng như sinh hoạt của con người. Các máy móc dần dần thay thế sức lao động tay chân của con người, thực hiện các công việc phức tạp và tốn nhiều công sức thay cho con người với hiệu quả và khối lượng công việc rất cao.
Công việc chăm sóc, tưới tiêu cây trồng đòi hỏi rất nhiều thời gian và công sức, chi phí nhân công cũng như phân bón,… Tuy nhiên những ngời chăm sóc thường hay làm theo kinh nghiệm. Để tiết kiếm các chi phí và giảm thiểu tình trạng sử dụng lãng phí tài nguyên nước, làm ảnh hưởng nghiêm trọng đến môi trường sống và sức khỏe của con người.
1.2. Mục tiêu của đề tài
Củng cố lại kiến thức về lập trình vi điều khiển pic 16F877A và các linh kiện điện tử như: cảm biến dòng, núm vặn encoder, ic ổn áp, transistor, diode, tụ điện, điện trở…Ngoài ra còn có các thiết bị đóng cắt điện như: CB, contactor, relay và thiết bị bảo vệ như cầu chì.
Viết chương trình đo dòng điện AC, cài đặt dòng Imin, Imax và viết chương trình cài đặt thời gian tác động, cài đặt thời gian chạy.
Tìm hiểu những khả năng mà vi xử lý có thể làm được.
Ứng dụng “ MẠCH BẢO VỆ VÀ ĐIỀU KHIỂN ĐỘNG CƠ BƠM NƯỚC ” vào thực tiễn.
Xây dựng mô hình thực tế để ứng dụng các chức năng tự động nhằm thay thế việc chăm sóc cây truyền thống.
1.3. Cấu trúc của quyển đồ án
Chương 1: Giới thiệu.
Chương 2: Cơ sở lý thuyết.
Chương 3: Thiết kế sơ đồ khối và thi công.
Chương 4: Viết chương trình vi xử lý.
Chương 5: Kết quả đạt được và hướng phát triển.
Bảng 1. 1: Kế hoạch thực hiện
Ngày |
Công việc |
Địa điểm |
Nguời thực hiện |
26/4 |
Tìm hiểu đề tài |
Trường CĐKT Cao Thắng |
Nguyễn Văn Minh Nhật |
27/4-29/4 |
Lên ý tưởng,tìm hiểu các loại cảm biến dòng |
Tại nhà |
|
01/5 |
Thiết kế mạch |
||
03-07/5 |
Thi công mạch |
||
08-14/5 |
Thi công phần cứng |
||
15-28/5 |
Viết code cho cảm biến dòng, từng phần chức năng |
Trường CĐKT Cao Thắng và tại nhà |
|
29-11/6 |
Hoàn thiện mô hình và code chương trình |
||
12/6-25/6 |
Viết báo cáo, sửa lỗi phát sinh |
||
26/6 |
Nộp báo cáo |
Trường CĐKT Cao Thắng |
|
03/7 |
Bảo vệ đồ án |
Trường CĐKT Cao Thắng |
Chương 2 Cơ sở lý thuyết
2.1. Vi điều khiển pic16F877A
Hình 2.1: Vi điều khiển pic 16F877A.
2.1.1. Một vài thông số của vi điều khiển pic 16F877A
PIC là viết tắt của “Programable Intelligent Computer”, có thể tạm dịch là “máy tính thông minh khả lập trình” do hãng Microchip sản xuất.
Tổ chức phần cứng của PIC được thiết kế theo kiến trúc Havard: bộ nhớ dữ liệu và bộ nhớ chương trình tách ra thành 2 bộ nhớ riêng biệt, do đó trong cùng một thời điểm CPU có thể tương tác với cả hai bộ nhớ, như vậy tốc độ xử lí của VĐK được cải thiện đáng kể. Một điểm cần chú ý nữa là tập lệnh trong kiến trúc Havard có thể được tối ưu tùy theo yêu cầu kiến trúc của VĐK mà không phụ thuộc vào cấu trúc dữ liệu. Ví dụ: đối với PIC loại 16F, độ dài lệnh luôn là 14 bit (trong khi dữ liệu được tổ chức thành từng byte).
PIC 16F877A là VĐK thuộc họ PIC16Fxxx với tập lệnh gồm 35 lệnh có độ dài 14 bit. Mỗi lệnh đều được thực thi trong một chu kì xung clock (bao gồm 4 xung clock). Tốc độ hoạt động tối đa cho phép là 20 MHz với một chu kì lệnh là 200ns.
- Bộ nhớ chương trình 8Kx14 bit, bộ nhớ dữ liệu 368x8 byte RAM và bộ nhớ dữ liệu EEPROM với dung lượng 256x8 byte.
- Số PORT I/O là 5 (port a, b, c, d, e) với 33 pin I/O.
- Các đặc tính ngoại vi bao gồm các khối chức năng sau:
- Timer0: bộ đếm 8 bit với bộ chia tần số 8 bit.
- Timer1: bộ đếm 16 bit với bộ chia tần số, có thể thực hiện chức năng đếm dựa vào xung clock ngoại vi ngay khi VDK hoạt động ở chế độ sleep.
- Timer2: bộ đếm 8 bit với bộ chia tần số, bộ postcaler.
- Hai bộ Capture/so sánh/điều chế độ rộng xung.
- chuẩn giao tiếp nối tiếp SSP (Synchronous Serial Port), SPI và I2C.
- Chuẩn giao tiếp nối tiếp USART với 9 bit địa chỉ.
- Cổng giao tiếp song song PSP (Parallel Slave Port) với các chân điều khiển RD, WR.
- CS ở bên ngoài.
- Các đặc tính Analog:
- 8 kênh chuyển đổi ADC 10 bit.
- Bên cạnh đó là một vài đặc tính khác của vi điều khiển như:
- Bộ nhớ flash với khả năng ghi xóa được 100.000 lần.
- Bộ nhớ EEPROM với khả năng ghi xóa được 1.000.000 lần.
- Dữ liệu bộ nhớ EEPROM có thể lưu trữ trên 40 năm.
- Khả năng tự nạp chương trình với sự điều khiển của phần mềm.
- Nạp được chương trình ngay trên mạch điện ICSP (In Circuit Serial Programming)
- thông qua 2 chân.
- Watchdog Timer với bộ dao động trong.
- Chức năng bảo mật mã chương trình.
- Chế độ Sleep.
- Có thể hoạt động với nhiều dạng Oscillator khác nhau.
2.1.2. Sơ đồ chân của vi điều khiển pic 16F877A
Hình 2.2: Vi điều khiển pic 16F877A.
Chức năng của các chân:
- Chân MCLR/VPP (1):
- MCLR: ngõ vào reset tích cực ở mức thấp
- VPP: ngõ vào nhận điện áp lập trình khi lập trình cho PLC
- Chân RA0/AN0 (2) VÀ RA1/AN1 (3): xuất nhập số / ngõ vào tương tự kênh 0, 1.
- Chân RA2/AN2/VREF-/VREF+ (4): xuất nhập số / ngõ vào tương tự kênh số 2 / ngõ vào điện áp chuẩn thấp của bộ ad / ngõ vào điện áp chuẩn cao của bộ ad.
- Chân RA3/AN3/VREF+ (5): xuất nhập số / ngõ vào tương tự kênh số 2 / ngõ vào điện áp chuẩn cao của bộ ad.
- Chân RA4/TOCK1/C1OUT (6): xuất nhập số / ngõ vào xung clock bên ngoài cho timer 0 / ngõ ra bộ so sánh 1.
- Chân RA5/AN4/SS/C2OUT (7): xuất nhập số / ngõ vào tương tự kênh 4 / ngõ vào chọn lựa spi phụ / ngõ ra bộ so sánh 2.
- Chân RE0/RD/AN5 (8): xuất nhập số / điều khiển port song song / ngõ vào tương tự 5.
- Chân RE1/WR/AN6 (9): xuất nhập số / điều khiển ghi port song song / ngõ vào tương tự 6.
- Chân RE2/CS/AN7 (10): xuất nhập số / chân chọn lựa điều khiển port song song / ngõ vào tương tự 7.
- Chân VDD (11, 32) và VSS (12, 31): là các chân nguồn của PIC.
- Chân OSC1/CLK1 (13): ngõ vào kết nối với dao động thạch anh hoặc ngõ vào nhận xung clock từ bên ngoài.
- Chân OSC2/CLK2 (14): ngõ ra dao động thạch anh hoặc ngõ ra cấp xung clock.
- Chân RC0/T1OSO/T1CK1 (15): xuất nhập số / ngõ vào bộ dao động timer 1 / ngõ vào xung clock bên ngoài timer 1.
- Chân RC1/T1OSI/CCP2 (16): xuất nhập số / ngõ vào bộ dao động timer 1 / ngõ vào capture 2, ngõ ra compare 2, ngõ ra pwm 2.
- Chân RC2/CCP1 (17): xuất nhập số / ngõ vào capture 1, ngõ ra compare 1, ngõ ra pwm 1.
- Chân RC3/SCK/SCL (18): xuất nhập số / ngõ vào xung clock nối tiếp đồng bộ, ngõ ra chế độ SPI / ngõ vào xung clock nối tiếp đồng bộ, ngõ ra của chế độ I2C.
- Chân RD0-7/PSP0-7 (19-22 VÀ 27-30): xuất nhập số / dữ liệu port song song.
- Chân RC4/SDI/SDA (23): xuất nhập số / dữ liệu vào spi / xuất nhập dữ liệu i2c.
- Chân RC5/SDO (24): xuất nhập số / dữ liệu ra spi.
- Chân RC6/TX/CK (25): xuất nhập số / truyền bất đồng bộ usart / xung đồng bộ USART.
- Chân RB0/INT (33): xuất nhập số/ ngõ vào tín hiệu ngắt ngoài.
- Chân RB1 (34), RB2 (35): xuất nhập số.
- Chân RB3/PGM (36): xuất nhập số/ cho phép lập trình điện áp thấp ICSP.
- Chân RB4 (37), RB5 (38): xuất nhập số.
- Chân RB6/PGD (39): xuất nhâp số / mạch gỡ rối và xung clock lập trình ICSP.
- Chân RB7/PGD (40): xuất nhập số/ mạch gỡ rối và dữ liệu lập trình ICSP
2.1.3. Timer1
Timer 1 là bộ định thời 16 bit, giá trị của Timer1 sẽ được lưu trong hai thanh ghi (TMR1H:TMR1L).
Cờ ngắt của Timer1 là bit TMR1IF (PIR1<0>).
Bit điều khiển của Timer1 sẽ là TMR1IE (PIE<0>).
Timer1 có hai chế độ hoạt động: chế độ định thời (timer) với xung kích là xung clock của oscillator (tần số của timer bằng ¼ tần số của oscillator) và chế độ đếm (counter) với xung kích là xung phản ánh các sự kiện cần đếm lấy từ bên ngoài thông qua chân RC0/T1OSO/T1CKI (cạnh tác động làcạnh lên). Việc lựa chọn xung tác động (tương ứng với việc lựa chọn chế độ hoạt động là timer hay counter) được điều khiển bởi bit TMR1CS (T1CON<1>).
2.2. Cảm biến dòng LCTA21CE
Hình 2.3: Cảm biến dòng LCTA21CE.
Mô tả về cảm biến dòng LCTA21CE:
Trong thiết kế của cảm biến dòng hiện nay nhằm cung cấp một dòng điện thứ cấp tiêu chuẩn, khi mà cường độ dòng điện vào đạt tới mức tối đa thì cũng không lệch khỏi phạm vi cường độ dòng điện cho phép của cảm biến dòng. Như cảm biến dòng LCTA21CE 40A/20mA. Dòng điện vào cho phép tối đa là 40A tương ứng với dòng điện ngỏ ra là 20mA.
Hình 2. 4: Sơ đồ chân cảm biến dòng LCTA21CE.
Mạch ứng dụng: có hai mạch lấy mẫu điện áp được nhà sản xuất khuyến khích nên sử dụng.
- Mạch thứ nhất:
Hình 2. 5: Lấy mẫu điện áp thu được bằng cách sử dụng một điện trở mắc với cuộn thứ cấp.
- Mạch thứ hai:
Hình 2.6: Lấy mẫu điện áp thu được bằng cách sử dụng một con IC mắc với cuộn thứ cấp.
2.3. Núm vặn encoder ALPSEC11
Hình 2.7: Núm vặn encoder ALPSEC11.
Mô tả về núm vặn encoder:
Núm vặn encoder không giới hạn số vòng quay, encoder đưa ra 2 xung vuông 90 độ gọi là 2 phase A và B, xung từ encoder đưa ra có thể dùng để nhận biết chiều quay, tốc độ quay, vị trí. Núm vặn encoder có 2 ngõ ra cho 2 phase và 1 ngõ ra dạng nút nhấn.
....................
lcd_data(" ");
}
else if(tt==5)
{
lcd_command(0xe0);
lcd_data(" ");
}
else hienthi();
}
else hienthi();
}
VOID MAIN()
{
SET_TRIS_B(0XFF);
SET_TRIS_A(0X0F);
LCD_init();
SETUP_TIMER_1(T1_INTERNAL|T1_DIV_BY_8);
SET_TIMER1(3036);
ENABLE_INTERRUPTS(GLOBAL);
ENABLE_INTERRUPTS(INT_TIMER1);
SETUP_ADC(ADC_CLOCK_DIV_32);
SETUP_ADC_PORTS(AN0);
output_low(rlden);
output_low(rldc);
output_low(loa);
tgchaygio=0;
tgchayphut=1;
giay=59;
bdn=0;
tgtd=tgtdt=10;
imin=2;
imax=6;
tt=0;
tt_c=0;
etgtd =read_eeprom(0x04);
WHILE(TRUE)
{
IF(BDN<10)
{
DOC_ADC();
nhap_nhay();
nn_tang();
nn_giam();
nn_luu();
}
ELSE
{
BDN = BDN - 10;
if(tt_c==0) kiem_tra_tgian_chay();
kiem_tra_tac_dong();
}
}
}
Chương 5 Kết quả đạt được và hướng phát triển
5.1. Kết quả đạt được
Hệ thống hoạt động khá ổn định.
Cảm biến dòng LCTA21CE trả về thông số chính xác, sai số ở mức chấp nhận đuợc.
Hệ thống tự động thực hiện các công việc như bảo vệ và điều khiển động cơ bơm nước, khi tưới nước cho cây hay phun sương, giải nhiệt tốt. Chạy theo ý muốn của người sử dụng. Ngoài ra còn có thể sử dụng mạch bảo vệ và điều khiển động cơ điện trong các lỉnh vực khác nhau như: lỉnh vực nông, công nghiệp, ứng dụng để bảo vệ các động cơ điện và máy điện trong các dây chuyền sản xuất…
5.2. Vận hành mô hình
Tùy theo công suất của động cơn điện và nhu cầu của người sử dụng, thì ta cài đặt các thông số dòng điện Imin, Imax và thời gian tác động,thời gian chạy sao cho phù hợp nhất.
Buớc 1: Bật CB mạch điều khiển và CB mạch động lực sang vị trí ON. Đèn báo đã có nguồn.
Hình 5. 1: Mạch bảo vệ và điều khiển động cơ bơm nước.
Bước 2: Cài đặt các giá trị thông số Imin, Imax và thời gian tác động, thời gian chạy và lưu các giá trị đã cài đặt.
Nhấn và xoay núm vặn encoder để cài đặt các giá trị thông số Imin, Imax và thời gian tác động, thời gian chạy và lưu các giá trị đã cài đặt.
Hình 5. 2: Hiển thị các thông số đã cài đặt.
5.3. Một số hạn chế
Khối cài đặt các giá trị thông số.Tăng và giảm giá trị chưa đúng theo ý muốn.
Thiếu kinh nghiệm đấu dây tủ điện.
5.4. Hướng phát triển
Áp dụng vào các lĩnh vực nông nghiệp, công nghiệp. Trong các dây chuyền sản xuất.
Cải thiện độ chính xác của các thông số từ cảm biến dòng gửi về.
Cải thiện board mạch bằng cách tăng thêm số lương cảm biến dòng để đo được nhiều động cơ điện và máy điện hơn.
Tối ưu hoá chương trình nhằm cải thiện khối cài đặt. Tăng, giảm giá trị theo ý muốn và giảm thiểu việc treo PIC.
Thêm chức năng điều khiển và giám sát từ xa thông qua mạng internet.
Tài Liệu Tham Khảo
[1] Đoàn Minh Hải,Giáo trình trang bị điện.
[2] Tống Thành Nhân,Giáo trình Vi xử lý.
[4] http://codientu.org
[5] http://webdien.com
[6] http://tailieu.vn
[7] http://dientuvietnam.net
Bảng 5. 1: Bảng chi tiết vật tư.
|
Số TT |
Tên vật tư - thiết bị |
Số lượng |
Đơn giá |
Tổng |
|
1 |
Board mạch bảo vệ và điều khiển động cơ bơm nước |
1 |
200.000 |
200.000 |
|
2 |
Pic 16F877A |
1 |
60.000 |
60.000 |
|
3 |
Cảm biến dòng LCTA21C |
1 |
70.000 |
70.000 |
|
4 |
Núm vặn encoder ALPSEC11 |
1 |
15.000 |
15.000 |
|
5 |
LCD 20X4 |
1 |
120.000 |
120.00 |
|
6 |
Relay 5VDC |
2 |
6.000 |
12.000 |
|
7 |
Dây bus |
1 |
13.000 |
13.000 |
|
8 |
Domino |
1 |
10.000 |
10.000 |
|
9 |
Tủ điện |
1 |
240.000 |
240.000 |
|
10 |
CB |
2 |
28.000 |
56.000 |
|
11 |
Contactor |
1 |
110.000 |
110.000 |
|
12 |
Cầu chì |
1 |
16.000 |
16.000 |
|
13 |
Dây điện Ф1.5mm2 |
10m |
4.000 |
40.000 |
|
14 |
Dây điện Ф1mm2 |
3m |
3.000 |
9.000 |
|
15 |
Đầu coss |
2 hộp |
18.000 |
36.000 |
|
16 |
Thanh nẹp |
1 |
50.000 |
50.000 |
|
17 |
Linh tinh |
|
200.000 |
200.000 |
|
Tổng giá thành |
1.257.000 |
|||











