LUẬN VĂN NGHIÊN CỨU PHÂN TÍCH ĐỘNG LỰC HỌC KHUNG 2D CHỊU TẢI CHU KỲ BẰNG FEM
NỘI DUNG ĐỒ ÁN
LUẬN VĂN NGHIÊN CỨU PHÂN TÍCH ĐỘNG LỰC HỌC KHUNG 2D CHỊU TẢI CHU KỲ BẰNG FEM
Phương pháp PTHH (FEM-Finite element method) là một trong những phương pháp số rất có hiệu quả để giải các bài toán bởi các phương trình vi phân cùng các điều kiện biên cụ thể của từng bài toán, đặc biệt những bài toán trong cơ học kết cấu.
Trong thời gian đầu phương pháp PTHH có nhiều ứng dụng rộng rãi trong các bài toán cơ học. Những năm gần đây, nhờ sự phát triển mạnh mẽ của máy tính số, phương pháp PTHH có những áp dụng hiệu quả trong bài toán cơ học.
Trên tế giới, việc ứng dụng phương pháp PTHH vào tính toán cho cơ học kết cấu đã trở nên phổ biến từ những năm 1950. Cụ thể nó được thể hiện trong “ Early finite element research at berkeley của tác giả Ray W. Clough và Edwark L.Wilson. bên cạnh đó phương pháp PTHH ngày càng được sử dụng rộng rãi với sự trợ giúp của máy tính thông qua các chưong trình như : ANSYS, SAP 2000, SAMCEF,…
Ở Việt Nam, một số nghiên cứu thành công trong lĩnh vực này có thể kể đến như:
Chẩn đoán dầm đàn hồi có nhiều vết nứt. [15]
Nhận dạng vết nứt trong kết cấu dầm khung. [16]
Nhận dạng vết nứt trong kết cấu giàn khoan. [17]
Nghiên cứu ảnh hưởng của vết nứt đến tần số dao động của kết cấu dầm khung.[18]
Nghiên cứu ảnh hưởng của vết nứt đến đặc trưng động lực học của kết cấu tấm mỏng. [19]
Nghiên cứu sự phát triển vết nứt trên chi tiết cơ khí bằng FEM và Wavelet. [20]
Chương I: Tổng quan
Traø Mi 2
1.2 TÍNH KHOA HỌC VÀ THỰC TIỄN CỦA ĐỀ TÀI:
Trong thực tế, một kết cấu khung, ngoài tải cố định tác dụng lên trên khung, khung còn chịu chính tải bản thân, cũng như các tải ngẫu nhiên như gió, động đất, …. Các loại tải này rất quan trọng trong tính toán, thiết kế khung. Xác định trường ứng suất và biến dạng của vật thể là cần thiết và có tính ứng dụng trong thực tế. Việc tính toán này nhằm giúp ta hiểu rõ hơn sự tác đông qua lại giữa tải tác dụng và kết cấu khung, thiết kế một cách hiệu quả kết cấu khung đó. Vì vậy, tác giả quyết định chọn đề tài “ Phân tích động lực học khung 2D chịu tải chu kỳ bằng FEM “.
1.3 NHIỆM VỤ CỦA LUẬN VĂN:
Sử dụng phương pháp phân tích phần tử hữu hạn - FEA (Finite Element Analysis) kết hợp với ngôn ngữ Matlab viết chương trình tính toán động học, động lực học tìm tần số dao động riêng của các mode dao động, đáp ứng chuyển vị và vận tốc của từng nút.
Mô phỏng động học và động lực học bài toán.
Cuối cùng, tác giả sẽ đưa ra các kết luận về kết quả thực hiện, nêu lên các vấn đề đã giải quyết được, các vấn đề còn tồn đọng chưa được giải quyết và đề xuất hướng phát triển của đề tài.
1.4 PHƯƠNG PHÁP NGHIÊN CỨU:
Để đề tài đạt được kết quả như mong muốn, tác giả phải nghiên cứu các kiến thức về cơ học lý thuyết có liên quan kết hợp với các phần mềm tính toán và mô phỏng, cụ thể như sau:
- Tìm hiểu về lý thuyết khung phẳng.
- Nghiên cứu về cơ sở lý thuyết phương pháp phần tử hữu hạn cho kết cấu khung phẳng.
- Tìm hiểu về phần mềm Matlab để sử dụng nó như một công cụ hỗ trợ trong quá trình tính toán. Đặc biệt là tìm hiểu về cấu trúc và sơ đồ phần tử hữu hạn với Matlab.
- Tìm hiểu về chương trình Ansys để tiến hành mô phỏng các bài toán, từ đó có cơ sở để kiểm tra kết quả tính toán.
Chương I: Tổng quan
Traø Mi 3
Bên cạnh nội dung trên, việc nghiên cứu về phương pháp tính và cơ học kết cấu
là rất cần thiết vì những kiến thức đó là một phần công cụ hỗ trợ trong quá trình
thực hiện đề tài.
1.5 XÁC ĐỊNH THUẬT NGỮ:
Tong đề tài này, một số thuật ngữ được dùng với ý nghĩa như sau :
PP PTHH - Phương pháp phần tử hữu hạn.
d d i
, - Các chuyển vị và vận tốc nút.
f , f
i - Tải trọng nút trên phần tử.
i , j , k , l - Các ký hiệu chỉ số.
x , y - Hệ tọa độ Đề các.
B - Ma trận tính biến dạng.
i
D - Chuyển vị nút toàn cục.
F - Vectơ tải toàn cục.
e K - Ma trận độ cứng phần tử.
K - Ma trận độ cứng toàn cục.
Me - Ma trận khối lượng phần tử,
M - Ma trận khối lương toàn cục.
N , N
i - Các hàm dạng trên phần tử.
- Ứng suất.
- Biến dạng.
............
CHƯƠNG III:
CƠ SỞ LÝ THUYẾT PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN CHO KẾT CẤU KHUNG PHẲNG
Chöông naøy seõ trình baøy lyù thuyeát phöông phaùp PTHH cho baøi toaùn khung phaúng vaø nhöõng phaàn lyù thuyeát lieân quan aùp duïng trong giaûi quyeát baøi toaùn.
3.1 DẠNG BÀI TOÁN CƠ HỌC :
Khi ngoại lực tác dụng vào vật thể thì xảy ra hiện tượng:
Có biến dạng.
Nội lực cân bằng ngoại lực.
Một trạng thái vật lý, một hiện tượng cơ học bao giờ cũng được mô tả dưới dạng các phương trình vi phân :
Tính chất vật liệu.
Tính tương thích. [8]
Cân bằng lực.
Việc giải trực tiếp các phương trình vi phân rất khó khăn, do đó Euler đã đề nghị xây dựng một phiếm hàm. Trong bài toán cơ học là các phiếm hàm năng lượng. Người ta đi tìm cực trị phiếm hàm và tìm nghiệm bài toán.
Hình 3.1
Đây là những ẩn số của bài toán.
Chương III: Cơ sở lý thuyết
SVTH : 19
Trong trường hợp không có phiếm hàm người ta có thể dùng các
phương pháp biến phân tức là tìm nghiện xấp xỉ (nghiệm yếu) với các điều
kiện cho trước :
Tính chất vật liệu ( định luật Hooke …). [6] (1)
Tính tương thích.( đầy đủ và liên tục) (2)
Cân bằng lực : F 0 (3)
Thực tế khó có phương pháp giải chính xác nào thỏa mãn đồng thời cả ba
điều kiện trên.
Phương pháp phần tử hữu hạn với mô hình chuyển vị (mô hình tương thích)
làm gốc thì đáp ứng chính xác (1) & (2) và thỏa mãn tương đối ràng buộc (3).
Phương pháp này thỏa mãn chính xác điều kiện biên về chuyển vị và ẩn số của
phương pháp này là chuyển vị.
Phương pháp phần tử hữu hạn với mô hình cân bằng (ứng suất) làm gốc thì
đáp ứng chính xác (1) & (3) và thỏa mãn tương đối ràng buộc (2). Ẩn số của
phương pháp này là lực và chuyển vị.
Ngoài ra ta có thể biểu diễn bằng đồ thị sau :
Bậc tự do
Mô hình cân bằng
Mô hình tương thích
Lời giải chính xác
Sai số mô hình
E
0
Hình 3.2 : Đồ thị biểu diễn sai số mô hình
Chương III: Cơ sở lý thuyết
SVTH : 20
Các phương pháp giải bài toán cơ vật rắn biến dạng hay bài toán cơ kết cấu theo sơ đồ sau (hình 17) :
Hình 3.3 : Sơ đồ các phương pháp giải bài
toán cơ vật rắn biến dạng
MÔ HÌNH THỰC
MÔ HÌNH VẬT LÝ
MÔ HÌNH TÍNH TOÁN
KẾT QUẢ
CÁC PHƯƠNG PHÁP GIẢI
CÁC PHƯƠNG PHÁP GIẢI TÍCH
CÁC PHƯƠNG PHÁP SỐ
Các phương pháp chính xác
Các phương pháp gần đúng
Các phương pháp số giải các phương trình vi phân
Phương pháp
PTHH
Phương pháp Rizt
Phương pháp phần dư có trọng
Phương pháp bình phương tối thiểu
Phương pháp tích phân số
Phương pháp sai phân hữu hạn
Mô hình tương thích
Mô hình cân bằng
Mô hình hỗn hợp
Định luật vật lý
Nguyên lý năng lượng
Mô hình
hóa
Chương III: Cơ sở lý thuyết
SVTH : 21
3.2. THIẾT LẬP PHƯƠNG TRÌNH VI PHÂN ĐỘNG LỰC HỌC .
Trong các bài toán kỹ thuật, ta thường gặp bốn mô hình cơ học sau : Hệ các
vật rắn, hệ các phần tử hữu hạn, hệ liên tục và hệ nhiều vật hỗn hợp. Các phương
trình toán học mô tả dao động của hệ các vật rắn là các phương trình vi phân
thường. Đối với hệ các phần tử hữu hạn, sau một số phép biến đổi ta cũng nhận
được hệ các phương trình vi phân thường.
Việc lựa chọn các phương pháp để thành lập các phương trình động lực học
của hệ nhiều bậc tự do phụ thuộc vào mô hình cơ học của các công trình. Có nhiều
phương pháp để thiết lập phương trình động lực học như : phương pháp dùng
phương trình Lagrange loại 2, phương pháp lực, phương pháp biến dạng, phương
pháp phần tữ hữu hạn, ngoài ra đối với cơ hệ phức tạp người ta còn sử dụng phương
pháp các hệ con (phương pháp tách cấu trúc). Dưới đây ta trình bày việc ứng dụng
phương trình Lagrange loại 2 để thiết lập phương trình vi phân động lực học.
Để có được phương trình vi phân của chuyển động đối với toàn vật thể,
chúng ta sử dụng phương trình Lagrange loại 2 trong dạng ma trận toàn vật thể. Chú
ý rằng động năng và thế năng của hệ hoàn toàn có thể biểu diễn theo các tọa độ suy
rộng là các chuyển vị nút.
(3.1)
Trong đó : L T được gọi là hàm Lagrange.
T là động năng của hệ.
là thế năng của hệ.
R là hàm tiêu tán.
d và d là vectơ chuyển vị nút và vận tốc nút tổng thể.
Ngoài ra theo mô hình tương thích của PP PTHH, cũng như cách phân tích
các bài toán tĩnh, các hàm chuyển vị của phần tử có thể được biểu diễn qua các bậc
tự do của các phần tử như sau :
Chương III: Cơ sở lý thuyết
SVTH : 22
Trong đó : {u}e là vectơ các chuyển vị (trường chuyển vị).
[N] là ma trận các hàm dạng.
{d}e là các vectơ chuyển vị nút phần tử mà các thành phần của
nó là các hàm của thời gian t.
Khi đó biến dạng của phần tử :
e e e e { } []{u} [][N]{d} [B]{d} (3.3)
[B] : gọi là ma trận tính biến dạng.
Còn ứng suất trong phần tử là :
e e e [ ] [D]{ ) [D][B]{d} (3.4)
Do chuyển vị là hàm của thời gian nên vận tốc cũng là một hàm của thời
gian:
e e {u} [N(x, y)]{d}
Trong đó e {d} là vectơ vận tốc nút phần tử.
Với một phần tử, động năng và thế năng có thể tính như sau :
Trong đó là khối lương riêng của vật liệu.
Nếu xem rằng tồn tại các lực cản tỉ lệ với vận tốc chuyển động thì biểu thức
hàm tiêu tán R có dạng :
Trong đó :
e [M] [M] là ma trận khối lượng tổng thể. (3.18)
e [K] [K] là ma trận độ cứng tổng thể. (3.19)
e [C] [C] là ma trận cản tổng thể. (3.20)
e n {F} {F} {F} là vectơ tải tổng thể. (3.21)
Trong đó :{F}n là vectơ các tải trong tập trung đặt tại các nút.
Chương III: Cơ sở lý thuyết
SVTH : 24
Chú ý rằng trong các biểu thức trên dấu là tổng quy ước, không phải là
phép cộng ma trận thông thường, mà phải hiểu là phép cộng có sắp xếp khi ghép nối
các phần tử.
Thay các biểu thức của động năng, thế năng vào phương trình Lagrange
chúng ta có được :
[M]{d}[C]{d}[K]{d} {F} (3.22)
Trong đó {d} là vectơ gia tốc tổng thể.
Sau khi áp đặt điều kiện biên động học, ta nhận được phương trình vi phân
chuyển động của hệ có dạng :
[M]{d}[C]{d}[K]{d}{F} (3.23)
Phương trình trên gọi là phương trình dao động cưỡng bức của kết cấu hay
vật thể theo mô hình tương thích của PP PTHH.
Tùy theo từng bài toán ta có thể bỏ qua ảnh hưởng của ma trận cản tức là
trong quá trình dao động hệ không hề mất mát năng lượng do các nguyên nhân như
ma sát trong, lực cản của môi trường…. khi đó phương trình (3.23) được viết lại
như sau :
[M]{d}[K]{d}{F} (3.24)
Phương trình (3.24) gọi là phương trình dao động cưỡng bức không cản.
Nếu phân tích bài toán dưới dạng phân tích tĩnh ( tức là bỏ qua ảnh
hưởng của ma trận khối lượng [M] ) khi đó (3.24) được viết lại như
sau :
[K]{d}{F} (3.25)
Nếu phân tích bài toán dưới dạng phân tích động học khi đó (3.24)
được viết lai như sau :
[M]{d}[K]{d}{F} (3.26)
3.3 ỨNG DỤNG PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN ĐỂ PHÂN TÍCH
BÀI TOÁN KHUNG PHẲNG [2][4].
Chương III: Cơ sở lý thuyết
SVTH : 25
Khi tính toán một kết cấu hay một công trình nào đó, nếu ta dựa vào mô hình thực để tính toán thường gặp nhiều khó khăn. Do đó để thuận tiện cho việc tính toán ta thường chuyển từ mô hình thực sang mô hình vật lý. Tùy theo quan điểm và khả năng của người nghiên cứu mà có thể quy bài toán về các mô hình khác nhau.
3.3.1 Khái niệm về phương pháp phần tử hữu hạn :
Phương pháp phần tử hữu hạn là một phương pháp số dùng để giải các bài toán cơ học, đặt biệt có hiệu quả để tìm dạng gần đúng của một hàm chưa biết trong miền xác định V của nó [5]. Tuy nhiên PP PTHH không tìm dạng xấp xỉ của hàm cần tìm trên toàn miền V mà chỉ trong từng miền con Ve (phần tử ) thuộc miền xác định V. Do đó phương pháp này rất thích hợp với hàng loạt bài toán vật lý và kỹ thuật trong đó hàm cần tìm được xác định trên những miền phức tạp gồm những miền nhỏ có đặc tính hình học, vật lý khác nhau, chịu những điều kiện biên khác nhau. Phương pháp ra đời từ trực quan phân tích kết cấu, rồi được phát biểu một cách chặt chẽ và tổng quát như một phương pháp biến phân hay phương pháp dư có trọng số nhưng đươc xấp xỉ trên mỗi phần tử .
Tư tưởng của PP PTHH là rời rạc hóa cấu trúc. Một số những điểm hữu hạn (nút phần tử) được định nghĩa trong cấu trúc. Cấu trúc được xem như là sự kết nối từ những cấu trúc con (những phần tử) trên các đường biên của chúng.
Trong PP PTHH miền V được chia thành một số hữu hạn các miền con, gọi là phần tử. các phần tử này được kết nối với nhau tại các điểm định trước trên bỉên phần tử liền nhau nhưng không kiên kết hoàn toàn với nhau trên khắp từng mặt biên của chúng, gọi là nút. Trường chuyển vị, biến dạng, ứng suất được xác định trong từng miền con. Mỗi miền con được gọi là một phần tử hữu hạn. Dạng phần tử có thể là thanh, thanh dầm, tấm, vỏ, khối. Trong phạm vi mỗi phần tử đại luợng cần tìm được lấy xấp xỉ trong dạng một hàm đơn giản được gọi là hàm xấp xỉ (apprximation function). Và các hàm xấp xỉ này được biểu diễn qua các giá trị của hàm (và có khi cả các giá trị của đạo hàm của nó) tại các điểm nút trên phần tử. Các giá trị này được gọi là các bậc tự do của phần tử và được xem là ẩn số cần tìm của bài toán.
Chương III: Cơ sở lý thuyết
SVTH : 26
Với bài toán cơ vật rắn biến dạng và cơ kết cấu tùy theo ý nghĩa vật lý của hàm xấp xỉ, người ta có thể phân tích bài toán theo ba loại mô hình sau: (Hình 18)
3.3.2 Các bước tiến hành khi giải một bài toán bằng PP PTHH :
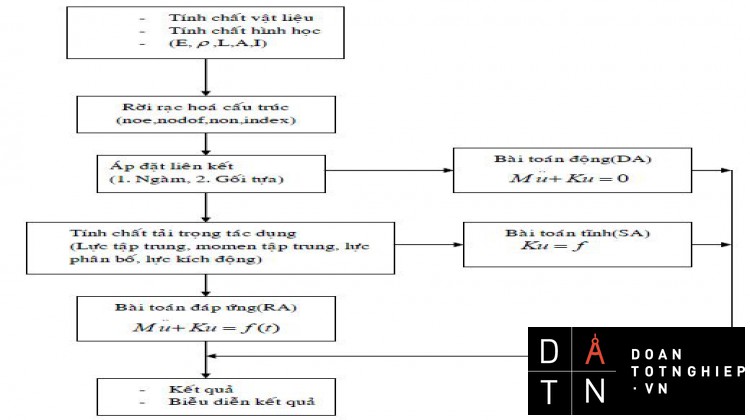
Khi áp dụng PP PTHH để giải một bài toán tổng quát thường phải kể đến các bước sau :
Rời rạc hóa miền bài toán thành một số hữu hạn các miền con liên kết với nhau tại các điểm nút :
Xây dựng lưới phần tử hữu hạn.
Xây dựng hệ tọa độ địa phương và toàn cục.
Xây dựng số nút và số phần tử.
Tính chất hình học của bài toán (tọa độ nút, tiết diện mặt cắt ngang, ứng xử vật liệu…)
Xây dựng ma trận độ cứng cho phần tử :
Xây dựng công thức biến phân từ các phương trình vi phân chính
tắc.
Chọn hàm xấp xỉ nghiệm trên phần tử.
Xác định hàm dạng cho nút của phần tử.
Thiết lập ma trận độ cứng của phần tử.
Lắp ghép các phương trình phần tử để thu được phương trình cho hệ:
Xây dựng điều kiện liên tục giữa các biên phần tử với các biến cơ
Phương pháp PTHH
Mô hình tương thích
Mô hình cân bằng
Mô hình hỗn hợp
Hình 3.4: Các mô hình trong PTHH
Chương III: Cơ sở lý thuyết
SVTH : 27
sở ( quan hệ giữa bậc tự do địa phương và bậc tự do toàn cục, thiết lập
quan hệ kết nối giữ các phần tử ) bằng quan hệ giữa nút địa phương và
với toàn cục.
Xây dựng điều kiện cân bằng giữa các biến thứ cấp (quan hệ tương
hỗ giữa các thành phần lực, nguồn địa phương và toàn cục).
Lắp ghép các phương trình phần tử dựa vào các bước trên.
Đưa vào bài toán các điều kiện biên :
Xác định bậc tự do toàn cục của biến sơ cấp.
Xác định bậc tự do toàn cục của biến thứ cấp.
Giải hệ phương trình đã lắp ghép :
Phân tích và đánh giá kết quả :
Tính các đại lượng dẫn xuất (Gradient của biến sơ cấp,…).
Tính sai số và tốc độ hội tụ của bài toán.
So sánh với lời giải giải tích nếu có.
3.3.3 Các hàm nội suy.
Hàm nội suy là một hàm trơn đi qua tập các điểm dữ liệu cho trước. Có
nhiều phương pháp nội suy như nội suy Lagrange, nội suy Hermit…. Tuy nhiên
phép nội suy đơn giản nhất là phép nội suy Lagrange.
3.3.3.1 Nội suy Lagrange.
Nếu chúng ta có n điểm chia trước : x , u(x ), i 1, 2, , n
i i , lúc đó công
thức nội suy Lagrange đi qua tập dữ liệu này là một đa thức bậc (n – 1) có dạng
Lời giải bao gồm hai phần :
1) Kích dộng bởi điều kiện ban đầu.
2) Đáp ứng do ngoại lực.
Tích phân tích chập trong nghiệm nói chung không dễ ước lượng, ngoại trừ
một vài trường hợp đặt biệt như hàm xung hay hàm bước.
Những điều kiện ban đầu (0), (0) i i cần cho lời giải đầy đủ. Từ phương trình
(3.95) suy ra :
{d(0)} []{(0)} (3.103)
Sao cho :
{ (0)} [ ] [M][ ]{d(0)} T (3.104)
Tương tự :
{ (0)} [ ] [M][ ]{d(0)} T (3.105)
Bây giờ nghiệm của mỗi tọa độ mode được kết hợp với nhau để tạo ra
nghiệm trong hệ tọa độ vật lý.
{d(t)} []{(t)} (3.106)
3.5. CÁC PHƯƠNG PHÁP TÍCH PHÂN SỐ DÙNG ĐỂ GIẢI PHƯƠNG
TRÌNH VI PHÂN CHUYỂN ĐỘNG CỦA KẾT CẤU KHUNG 2D [4].
Hiện nay có nhiều phương pháp tích phân số dùng để giải phương trình vi
phân chuyển động của kết cấu như : Phương pháp sai phân trung tâm, phương pháp
Newmark, phương pháp Hilber, phương pháp Runge – Kutta, phương pháp gia tốc
tuyến tính … Trong phạm vi bài toán chỉ sử dụng hai phương pháp đó là phương
pháp sai phân trung tâm và phương pháp Newmark.
3.5.1. Phương pháp sai phân trung tâm :
Khi áp dụng phương pháp phần tử hữu hạn, hệ kết cấu thường được rời rạc hóa
thành lưới phần tử hữu hạn. Nghiên cứu bài toán dao động công trình thông thường
dẫn đến việc trong một khoảng thời gian nào đó phải giải hệ phương trình vi phân:
Chương III: Cơ sở lý thuyết
SVTH : 43
[M]{d(t)}[C]{d(t)}[K]{d(t)}{F(t)} (3.107)
Đối với kết cấu khung là hệ không có giảm chấn, khi phân tích động học dẫn
đến việc giải phương trình vi phân :
[M]{d(t)}[K]{d(t)} {F(t)} (3.108)
Với các điều kiện ban đầu ở thời điểm t =t0 có { ( )} { } 0 0 d t d và { ( )} { } 0 0 d t d .
Ta sử dụng phương pháp giải trực tiếp hay còn gọi là phương pháp chia bước
bằng cách tích phân trực tiếp hệ phương trình vi phân (3.107) trong từng khoảng
chia thời gian t . Thực chất của phương pháp là giải bài toán tĩnh trong từng bước
chia thời gian t nhưng có kể đến lực quán tính và lực cản, đồng thời phương trình
cân bằng được giải nhiều lần đối với các điểm chia trong khoảng thời gian dao
động.
Xem hàm chuyển vị {d(t)}thay đổi theo đường cong parabol bậc hai như
hình 24, và đi qua các giá trị của hàm tại các điểm chia là {d(t t)}, {d(t)} và
{d(t t)}.
Từ Hình 3.8 ta có thể xác định được chuyển vị tại thời điểm theo biểu thức
Biểu thức (3.69) cho thấy gia tốc của chuyển vị {d(t)} được xác định như
giá trị trung bình của hàm chuyển vị {d(t)} tại các điểm chia (t t) và (t t) , do
đó phương pháp này được gọi là phương pháp sai phân trung tâm.
Vấn đề quan trọng là chọn độ lớn của bước chia thời gian t và sự ổn định
của phương pháp khi giải hệ phương trình đại số tuyến tính trong khoảng bước chia
thời gian t .Ta xác định giá trị tới hạn của bước chia thời gian t để đảm bảo quá
trình tính theo phương pháp sai phân trung tâm là ổn định : [6]
tth (3.114)
Trong thực tế tính toán giá trị th t rất nhỏ, do đó khối lượng tính toán sẽ rất
lớn, ngoài ra, trong nhiều trường hợp tính toán dao động công trình cũng không đòi
hỏi phải xác định các tần số dao động bậc cao, do đó ta chỉ nên áp dụng phương
pháp sai phân trung tâm khi cần tính dao động của hệ có số bậc tự do lớn đòi hỏi
phải xác định các tần số dao động riêng bậc cao.
Ngoài ra phương pháp sai phân trung tâm có thể biểu diễn bằng sơ đồ sau :[12]
Chương III: Cơ sở lý thuyết
SVTH : 45
3.5.2 Phương pháp Newmark.
Trong phương pháp sai phân trung tâm giá trị gia tốc của chuyển vị được
xem là không đổi trong phạm vi hai bước chia thời gian t . Phương pháp
Newmark xem gia tốc chuyển vị là không đổi trong mỗi đoạn chia thời gian t và
bằng giá trị trung bình của gia tốc tại thời điểm t và t t : (Hình 3.12)
( ) ( )
2
1
d(t ) d t t d t (3.115)
Hình 3.11 : Lưu đồ tính tích phân theo thời gian
Với sơ đồ sai phân trung tâm
.....................
Chương VI
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
6.1 KẾT LUẬN
Với đề tài "Phân tích động lực học khung 2D chịu tải chu kỳ bằng phương FEM, tác giả đã thực hiện được các nội dung sau:
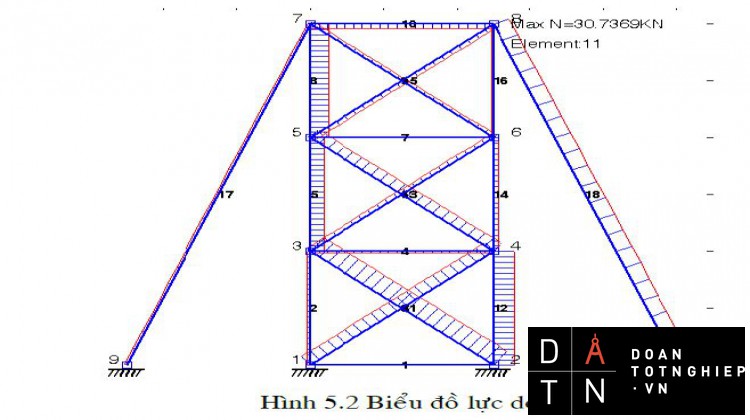
{ Phân tích tĩnh học, đưa ra kết quả mô hình chuyển vị, biểu đồ lực dọc, lực cắt và moment của bài toán.
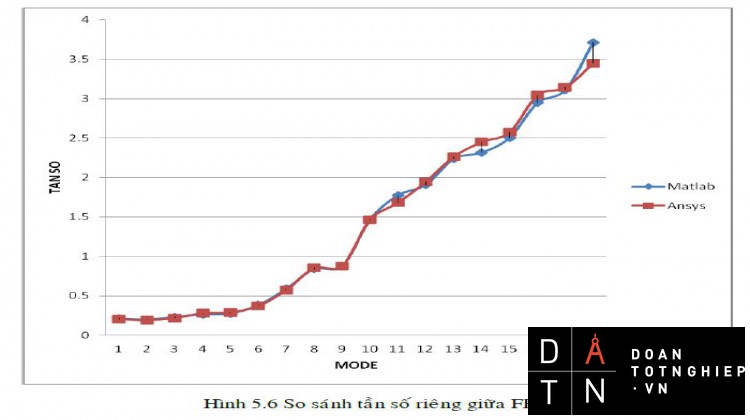
{ Phân tích mode, đưa ra kết quả tần số dao động riêng. Tính chính xác của bài toán được kiểm chứng với kết quả từ phần mềm Ansys,
{ Các bài toán được phân tích với những thông số khác nhau để có được lời giải tin cậy và hiệu quả.
{ Sử dụng phương pháp phần tử hữu hạn trong việc giải quyết các vấn đề chuyển vị, biến dạng mang lại nhiều hiệu quả thiết thực. Trong luận văn, tác giả đã sử dụng FEM để tính toán trường vận tốc và trường chuyển vị với những điều kiện của cơ học kết cấu. Kết quả thu được rất khả quan vì sai số giữa lời giải FEM so với Ansys là tương đối nhỏ (< 7%).
6.2 HƯỚNG PHÁT TRIỂN
Đề tài này có thể nghiên cứu phát triển theo các hướng sau đây:
{ Trong thực tế, tải ngẫu nhiên tác dụng lên hệ như tải gió, tải sóng, tải động đất,v.v. Từ tải ngẫu nhiên này, ta đưa về tải tổ hợp có chu kỳ. Nó phải được đo đạc từ thực nghiệm, từ đó tìm ra quy luật của tải này. Sau đó, ta sử dụng các phương pháp phân bố xác suất, phương pháp nội suy, v.v.đưa tải vào bài toán tốt hơn, nâng cao ý nghĩa thực tiễn của luận văn.
Chương VI: Kết luận
SVTH: 84
{ Luận văn chỉ dừng ở phân tích động lực khung 2D. Vì vậy, dựa trên cơ sở 2D, cần tiếp tục phân tích động lực học khung 3D và tính toán tối ưu kết cấu.