ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON QUỐC TẾ 2014 điều khiển TỰ ĐỘNG





NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON QUỐC TẾ 2014 điều khiển TỰ ĐỘNG
LỜI GIỚI THIỆU
Trên con đường tiến tới công nghiệp hóa, hiện đại hóa đất nước thì nước ta phải phát triển các ngành khoa học kỹ thuật như: công nghệ thông tin, công nghệ cơ khí, kỹ thuật điện tử, công nghệ CNC, thủy lực, khí nén… Bên cạnh đó xã hội hiện nay ngày càng phát triển, đòi hỏi nguồn nhân lực chuyên môn ngày càng cao. Do đó trong ngành kỹ thuật, cần phải có những thiết bị, máy công cụ chính xác đồng thời giảm sức lao động của con người.
Mỗi ngành như: cơ khí, điện tử, tin học đều có nền tảng khoa học vững chắc và tạo ra các sản phẩm đặc trưng riêng. Tuy nhiên, yêu cầu của thời đại đặt ra yêu cầu cao hơn về cách hoạt động của máy móc, yêu cầu máy móc cần phải gọn nhẹ hơn, linh động hơn, uyển chuyển hơn và thông minh hơn. Các kỹ sư cơ khí không thể làm máy móc thông minh hơn, trong khi những kỹ sư tin học có thể tạo ra trí thông minh nhân tạo nhưng họ không biết về cơ khí, những kỹ sư điện tử có thể kết nối và điều khiển tín hiệu, nhưng họ không thể kết nối giữa trí thông minh nhân tạo để điều khiển thiết bị cơ khí. Chính yêu cầu này đã hình thành nên ngành Cơ điện tử để tạo ra sản phẩm mới đáp ứng các yêu cầu đặt ra trên cơ sở phối hợp nền tảng sẵn có của các ngành với nhau.
Với khả năng am hiểu về cơ khí, điện tử, tin học, và các công nghệ hiện đại... người kỹ sư cơ điện tử đưa vào các sản phẩm cơ khí hệ thống điều khiển linh hoạt bằng điện tử, và thông qua hệ thống điện tử, kết nối với hệ thống xử lý thông tin - trí thông minh nhân tạo để tạo ra một sản phẩm hoàn chỉnh.
Cụ thể như: tay máy công nghiệp, robot công nghiệp, nghiên cứu về trí tuệ nhân tạo, chế tạo robot giống người, robot tự hành…
Do có sự hạn chế về thời gian cũng như kiến thức và kinh nghiệm nên đề tài nhóm chúng em nghiên cứu không tránh khỏi những sai sót. Rất mong được sự chấp nhận và sự đóng góp ý kiến của quý thầy cô và các bạn về đề tài này, để chúng em cũng cố lại kiến thức và rút kinh nghiệm trước khi ra trường.
MỤC LỤC
Chương 1: THIẾT KẾ VÀ THI CÔNG. 1
1.1 Nhiệm vụ RoBot: 1
1.1.1 Những khó khăn: 1
1.1.2 Khắc phục khó khăn: 1
1.2 Cơ khí: 2
1.2.1 Ý tưởng: Thiết kế Robot tự động. 2
1.3 Thiết kế. 3
1.3.1 Giai đoạn 1: thiết kế phần thân chính: 3
1.3.2 Giai đoạn 2: thiết kế thanh trượt. 5
1.3.3 Giai đoạn 3: Thiết kế chiếc xe con. 5
1.3.4 Giai đoạn 4: Thiết kế cơ cấu gạt lá. 7
1.3.5 Giai đoạn 5: Thiết kế tay kẹp. 8
1.3.6 Giai đoạn 6: Thiết kế tay gắp mầm. 10
1.3.7 Giai đoạn 7: cơ cấu giữ xe con. 10
1.4 Thi công các cơ cấu: 12
1.4.1 Giai đoạn 1: Thiết kế phần chính. 12
1.4.2 Giai đoạn 2: Thiết kế thanh trượt dẫn hướng. 13
1.4.3 Giai đoạn 3: Thiết kế chiếc xe con. 14
1.4.4 Giai đoạn 4 :Thi công cơ cấu gạt lá: 16
1.4.5 Giai đoạn 5: Thi công cơ cấu kẹp giữ lá. 18
1.4.6 Giai đoạn 6: Thi công tay gấp mầm. 19
1.4.7 Giai đoạn 7: thiết kế cơ cấu hãm cho xe con. 21
Chương 2: ĐIỆN TỬ. 22
2.1 Sơ đồ tổng thể mạch điện trên robo: 22
2.2 Điện tử: 23
2.2.1 Mạch nguồn xung LM2576-5v: 23
2.2.2 Giới thiệu linh kiện trong mạch: 23
2.2.3 Một số tính năng chính của LM2576. 24
2.2.4 Mach nguồn LM7805. 26
2.3.5 Mach vi xử lý DS pic 30F4011. 28
2.3.6 Mạch công suất fet relay: 30
2.3.7 Mạch dò line : 35
2.3.8 Modun bluetooth HC-05 : 35
Chương III. GIẢI THUẬT LẬP TRÌNH. 37
1.1 Giới thiệu chức năng VĐK : 37
1.1.1 Giới thiệu vi điều khiển sử dụng: 37
1.1.2 Giới thiệu cơ bản về chức năng ADC: 37
1.1.3 Giới thiệu cơ bản về chức năng QEI: 37
1.1.4 Giới thiệu cơ bản về chức năng UART: 38
1.2 Module Bluetooth HC-05: 39
1.3 Sơ đồ khối: 40
1.4 Lưu đồ giải thuật: 41
CHƯƠNG 4 :KẾT LUẬN.. 57
1. Những hạn chế và hướng khắc phục : 57
2. Hướng phát triển : 58
DANH MỤC HÌNH VẼ
CHƯƠNG 1: THIẾT KẾ VÀ THI CÔNG
CƠ KHÍ:
Hình 1.1 Cơ cấu xe chính.
Hình 1.1.1 Bánh xe chủ động , bánh omi và bánh đai
Hình 1.1.2 Lắp ráp bánh xe và động cơ qua đai
Hình 1.2. Cơ cấu dẫn hướng cho xe con.
hình 1.3. Cơ cấu đẩy phôi.
Hình 1.4. Kết cấu lắp bánh omi.
Hình 1.4.1. ổ bi
Hình 1.4.2. Cơ cấu chuyển động của xe con.
Hình 1.5. Cơ cấu gạt phôi.
Hình 1.5.1. Cơ cấu động lực đẩy phôi.
hình 1.6. Cơ cấu tay giữ phôi
Hình 1.6.1. Tay kẹp phôi
Hình 1.6.2. Động cơ và bánh răng trong tay kep phôi.
Hình 1.7. Cánh tay và động cơ kéo
Hình 1.8. Cơ cấu thắng tren robo.
Hình 1.8.1. Robo hoàn chỉnh
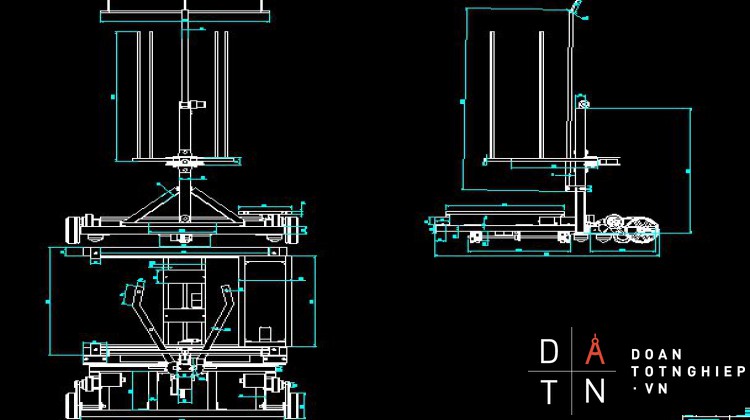
Hình 1.9. Mô hình thiết kế 3D
Hình 1.9.1. Mô hình thực tế
Hình 2.1. thanh dẫn hướng
Hình 2.2. Mô hình thiết kế 3D.
Hình 2.2.1. Mô hình thực tế.
Hình 2.3. Mô hình thiết kế 3D.
Hình 2.3.1. Mô hình thiết kế thực tế.
Hình 2.4. Mô hình 3D tay gạt phôi.
Hình 2.4.1. Mô hình thực tế.
Hình 2.5. Mô hình 3D tay kẹp phôi.
Hình 2.5.1. Mô hình thực tế.
Hình 2.6. Tay gắp mầm thực tế và trên thiết kế 3D
Hình 2.6.1. Motor trong tay gắp mầm
Hình 2.7. thắng từ
Hình 2.7.1. Cơ cấu thắng trên robo.
CHƯƠNG 2: ĐIỆN TỬ
Hình 1.1.Nguồn xung 2576-5v.
Hình 1.1.1.Diode 4007.
Hình 1.1.2. LM2576-5v.
Hình 1.1.3. Cấu tạo của lm2576.
Hình 1.1.4. Diode zener 1N5822.
Hình 1.1.5. Cuộn cảm .
Hình 1.2. Sơ đồ nguyên lý mạch nguồn 5V(DC).
Hình 1.2.1. Tụ điện phân cực.
Hình 1.2.2 lm7805.
Hình 1.2.3. Điện trở.
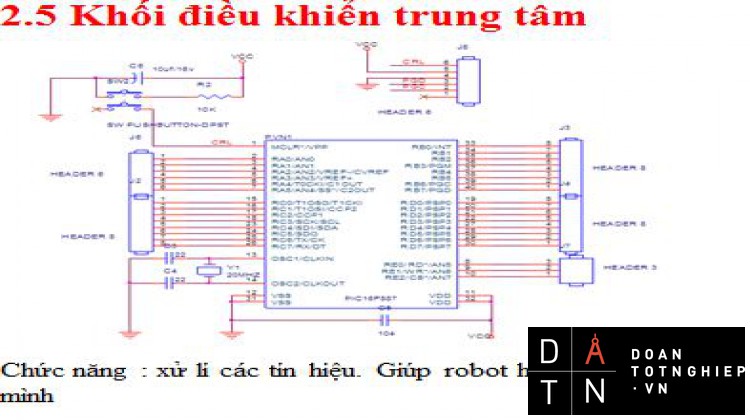
Hình 1.3. Nguyên lý mạch MCU DSpic 30F4011.
Hình 1.3.1. Thạch anh 7.8327MHZ.
Hình 1.3.2. DSpic 30F4011.
Hình 1.4. Sơ đồ nguyên lý Fet relay
Hình 1.4.1. Opto pc817.
Hính 1.4.2. Nút nhấn.
Hình 1.4.3. Transitor D468.
Hình 1.4.4. Diode 4007.
Hình 1.4.5. IRF 3205 và cấu tạo bên trong.
Hình 1.4.6. Cấu tạo của mosfet.
Hình 1.4.7. Relay và cấu tạo của relay.
Hình 1.5. Sơ đồ mạch cảm biến.
Hình 1.5.1. Modun bluetooth HC-05.
Hình 1.5.2. Sơ đồ kết nối với VĐK.
CHƯƠNG 3 : GIẢI THUẬT LẬP TRÌNH.
Hình 1.1. Đĩa encoder
Hình 1.2. thanh ghi trong pic.
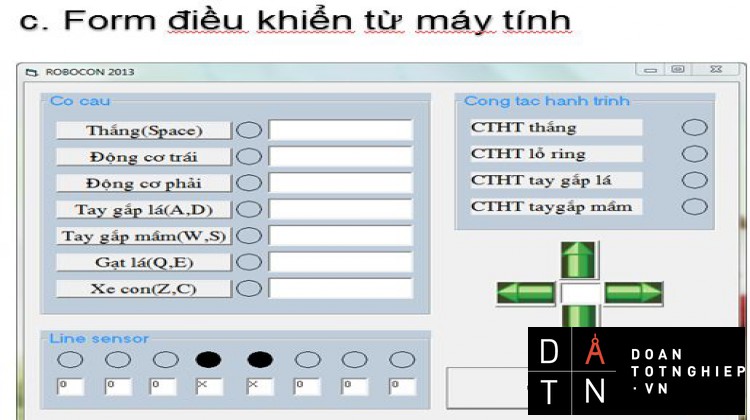
Hình 1.3 giao diện giao tiếp máy tính.
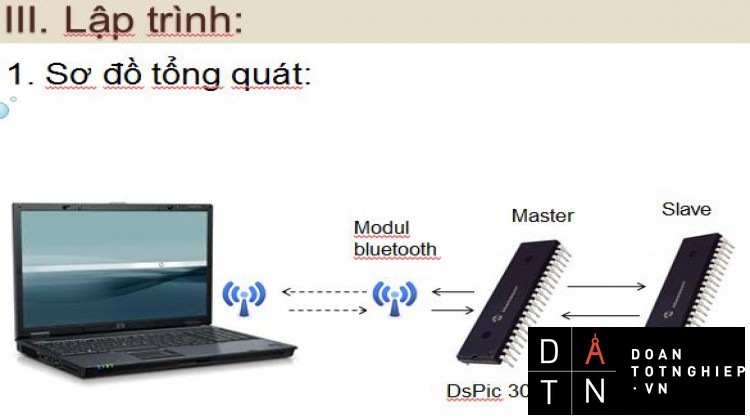
Hình 1.4. sơ đồ kết nối máy tính qua Bluetooth.
Hình 1.1. sơ đồ khối tổng quát
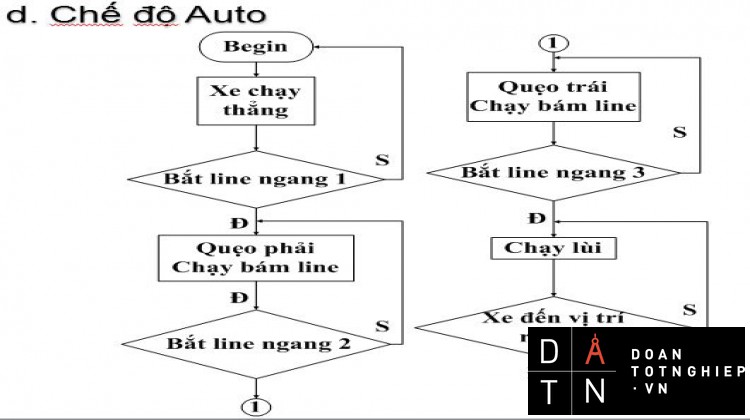
Hình 1.2. sơ đồ chế độ chạy tự động.
Hỉnh 1.3 xác định vị trí ring.
Hình 1.4. nhận dữ liệu
Hình 1.5. truyền dữ liệu.
Hình 1.6. hoạt động gắp mầm.
Hinh 1.7. hoạt động thả lá.
Hình 1.8. lấy mẫu line
Hình 1.9 .lấy mẫu nền.
Hình 2.0. đọc cảm biến.
Hình 2.1. đọc line
Hình 2.2 bắt line ngang.
Hinh 2.3 truyền nhận dữ liệu.
Chương 1: THIẾT KẾ VÀ THI CÔNG.- Nhiệm vụ RoBot:
Robot bằng tay lấy lá ở kho, đem gắn vào 3 các ô trống (Ring) tại bán cầu Nam;
Tiếp theo, Robot bằng tay đi lấy lá ở kho chuyển cho Robot tự động. .
Robot tự động đi gắn tối thiểu 3 lá ở vùng bán cầu Bắc (bao gồm 2 lá ở phần sân đội mình và một lá ở vùng chung). Sau đó, Robot tự động mới được phép chạm vào mầm đặt ở cực Bắc.
Robot tự động đi lấy mầm của đội mình đặt ở vùng cực Bắc chuyển cho Robot bằng tay.
Robot bằng tay đứng dưới đường giới hạn 2 và ném các mầm vào vùng mặt trăng. Nếu mầm của đội nào đứng trên vùng mặt trăng trước đội đó giành chiến thắng tuyệt đối.
- Những khó khăn:
-

Bước đầu khi bắt tay vào thi công , chúng em có nhiều khó khăn gặp phải , thiếu kinh nghiem nên chúng em khong biết phải làm từ phần nào trước. và có nhếu ý kiến chưa thống nhất.
Mạch điện thiết kế chạy chưa được ổn định.
Thiếu kinh nghiệm trong việc lực chọn và mua các nguyên vật liệu để làm .
- Khắc phục khó khăn:
Cơ khí và điện tử được chúng em thi công song song, sau nhiều lần họp nhóm và lấy ý kiến từ giáo viên hưỡng dẫn chúng em đã thống nhất một ý tưởng .
Về phần mạch điện, chúng em đã thử nghiệm nhiều lần và mạch đã chạy ổn định, có thể chạy cho động cơ để.
- Cơ khí:
Đề tạo nên một con robot hay một mô hình sản phẩm hoàn chỉnh và hạn chế đến mức thấp nhất những nhược điểm khó khăn khi sử dụng, cũng như chi phí tạo nên một sản phẩm, thì vấn đề cần quan tâm nhất là đề ra các phương án giải quyết tối ưu nhất phù hợp với mục tiêu của đề tài. Về đề tài THIẾT KẾ-CHẾ TẠO ROBOT thì nhóm đã tìm hiểu tính toán và đề ra các phương án tối ưu nhất. Sau đó bắt tay vào thi công.
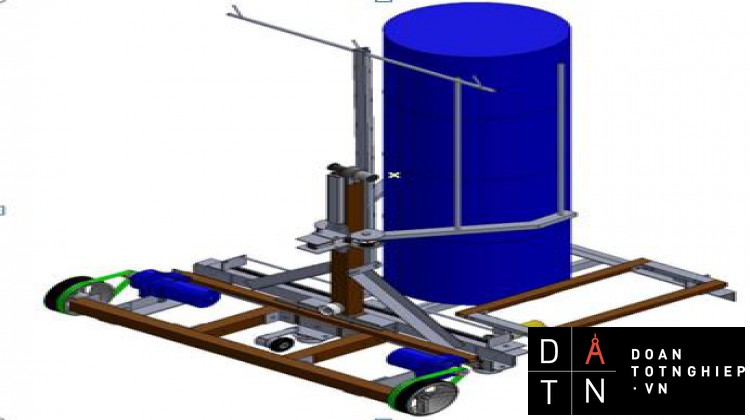
- Ý tưởng: Thiết kế Robot tự động
Thiết kế Robot về phần duy chuyển có thể đang duy chuyển về phía trước(phía sau). Sau đó, duy chuyển sang ngang một cách nhanh chóng mà không cần phải xoay toàn bộ Robot theo hướng quay sang trái hay sang phải, để có thể thả những chiếc lá một cách nhanh chóng.
Để có thể làm được điều đó, thì nhóm chúng em có một ý tưởng là thiết kế Robot có hai phần. phần thứ nhất là phần chính của Robot, giúp cho Robot duy chuyển theo hướng tiến về phía trước hay là lùi về phía sau. Phần thứ hai là phần xe con được gắn kết với thân xe chính. Giữa thân xe chính và xe con khi gắn kết lại làm một có thể xem như một khối. khi mà tới lúc cần thiết để thả những chiếc lá thì chiếc xe nhỏ này sẻ tách khỏi phần thân chính để duy chuyển sang ngang và hoàn thành công việc cần thiết.
Để có thể kết nối giữa hai phần thân chính và xe con lại. Mà có thể chuyển động như mong muốn
Phần dữ những chiếc là của Robot. Thiết kế cánh tay kẹp có thể giữ được bốn chiếc là không bị rơi khỏi xe khi duy chuyển và lúc thả những chiếc lá vào ring.
1.2.2 Tính toán chọn động cơ:
Để có được một cặp động cơ mạnh và khỏe, có đủ momen để duy chuyển được Robot. Thì nhóm chúng em đã tìm hiểu về một loại đông cơ mà hầu như là tất cả mọi người điều biết, đó là động cơ đề của xe máy. Động cơ đề dùng để khở động động cơ xe máy, nên nhà sản xuất cần tạo nên một động cơ phải thật khỏe.
- Ưu nhược điểm của động cơ đề:
- Ưu điểm của động cơ đề:
Động cơ khỏe, có lực momen lớn và nhanh .
- Nhược điểm:
Khi hoạt động thì động cơ đề làm hao phí dòng điện rất nhiều.
Vì vậy, nhóm chúng em đã tìm cách cải thiện nhược điểm này. Đó là quấn lại phần lỗi đồng của động cơ đề.
-
Thiết kế
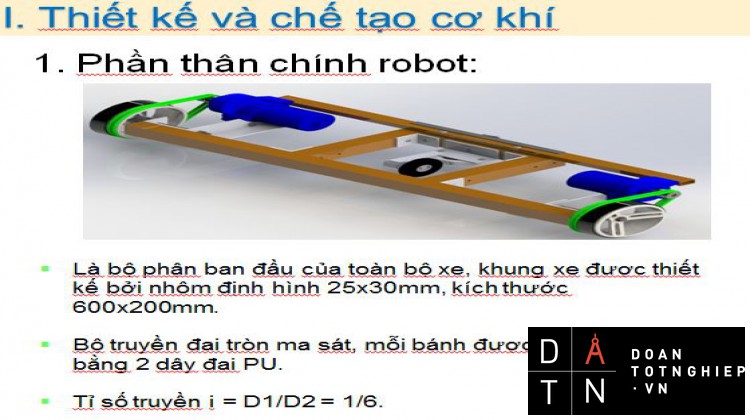
- Giai đoạn 1: thiết kế phần thân chính:
là phần quan trọng của Robot tự độngdùng đề đưa toàn bộ robot tự động di chuyển trên sân thi đấu. Có nhiệm vụ là duy chuyển toàn Robot trên sân.
Phần thân chính làm bằng nhôm định hình trên lắp đặt dộng cơ đề, hai bánh xe gắng hai bên được làm bằng nhôm, một bánh mắt trâu cở lớn. Dưới đây là phương án mà nhóm chung em thiết kế. khi thiết kế thì nhóm chúng em cố gắng thiết kế một lần, để giảm được thời gian thiết kế. Dành thời gian đó vào trong việc thi công.
Phần thân chính Robot được thiết kế đơn giản, kích thước khung 600x200 mm, được làm bằng nhôm định hình.
Hình 1.1 Cơ cấu xe chính.
Trên phần thân chính có gấng động cơ đề, hai bánh xe bằng nhôm có d= 100 mm. Một bánh mắt trâu. Bánh mắt trâu có thể giúp Robot duy chuyển một cách dể dàng trên sân.
Hình 1.1.1 Bánh xe chủ động , bánh omi và bánh đai.
Để truyền lực từ động cơ tới bánh xe thì chúng em dùng dây đai(như hình)
Hình 1.1.2 Lắp ráp bánh xe và động cơ qua đai.
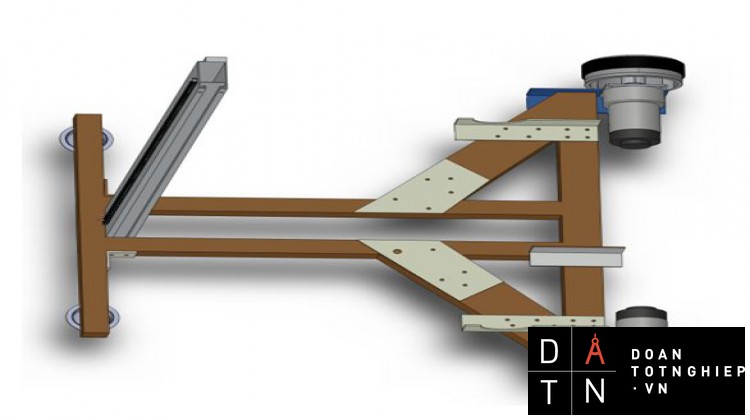
- Giai đoạn 2: thiết kế thanh trượt.
Thanh trượt có nhiêm vụ giữ cho xe con không rời ra khỏi phần thân chính khi Robot duy chuyển. Thanh trượt sẽ dẫn hướng cho xe con duy chuyển tịnh tiến mà không bị lệch khỏi phần thân chính khi duy chuyển trở về vị trí ban đầu. nên thanh trượt phải được thiết kế có thể trượt theo hai hướng qua lại như nhau mà không bị giới hạn khoảng cách.
Hình 1.2. Cơ cấu dẫn hướng cho xe con.
- Giai đoạn 3: Thiết kế chiếc xe con.
Xe con dùng để chứa những chiếc lá. Có nhiệm vụ vận chuyển những chiếc lá tới các ring.
Xe con được thiết kế đơn giản. Trên xe con có gắn bánh mắt trâu, bánh omi, động cơ để duy chuyển xe con chuyển động tịnh tiến qua lại, cần gạt lá, tay kẹp…
hình 1.3. Cơ cấu đẩy phôi.
Do xe con cần phải ôm sát vào ring. Nên bánh xe duy chuyển chính của xe con được đặt ở giữa. Bánh xe chuyển động chính của xe con là bánh omi. Vì khi duy chuyển Robot chỉ duy chuyển tới hoặc lui. Còn xe con chỉ có thể duy chuyển sang ngang. Bánh omi có đặc điểm có thể duy chuyển tới lui sang ngang một cách dể dàng.
Bánh omi được dùng làm bánh chuyển động chính của xe con.
Hai bánh mắt trâu được đặt hai bên để giữ thăng bằng cho xe con.
Hình 1.4. Kết cấu lắp bánh omi.
Hình 1.4.1. ổ bi
Chuyển động của xe con là chuyển động nhờ vào bộ truyền xích.
Hình 1.4.2. Cơ cấu chuyển động của xe con.
- Giai đoạn 4: Thiết kế cơ cấu gạt lá.
Trên thân xe con có gắn cơ cấu gạt lá. Để khi xe con chạy tới ring thì cơ cấu này sẽ gạt những chiễ lá vào trong các ring.
Cơ cấu gạt lá có thể duy chuyển tịnh tiến trên xe con. Nhờ hai truc dẫn hướng. khi duy chuyển thì động cơ trên cần gạt quay, bánh răng sẽ lăng trên từng mắt xích
được gắn chặt trên xe con, làm cho cần gạt duy chuyển tịnh tiến trên xe con.
Hình 1.5. Cơ cấu gạt phôi.
Hình 1.5.1. Cơ cấu động lực đẩy phôi.
- Giai đoạn 5: Thiết kế tay kẹp.
Tay kẹp được làm bằng nhôm hộp 20x10mm. Có gắn 4 ống nhôm tròn để giữ những chiếc lá không rơi khi Robot duy chuyển.
Tay kẹp là một kết cấu kẹp gần giống như tay con người có thể mở rộng ra hay khép vào. Hiện nay tay kẹp được ứng dụng rộng rãi trong ngành công nghiệp như tay máy robot công nghiệp, tay gắp công nghiệp…
Để tay kẹp có thể mở rộng ra hay khép lại vào thi cần phải có cơ cấu trợ động như dùng động cơ kéo, hệ thống pittong và khí nén, trục vit me…
Tay kẹp hoạt động như tay con người có thể mở ra kẹp lại một cách dể dàng. Hai thanh nhôm sẽ chuyển động như nhau nhưng mà đối lặp nhau, cùng mở ra và cùng kẹp chặt lại để giữ cho chiếc lá không bị rơi khi duy chuyển.
hình 1.6. Cơ cấu tay giữ phôi
Hình 1.6.1. Tay kẹp phôi
Tay kẹp có thể hoạt động được. Trên tay kẹp có gắn bánh răng, động cơ có gắn trục vít
Hình 1.6.2. Động cơ và bánh răng trong tay kep phôi.
- Giai đoạn 6: Thiết kế tay gắp mầm.
Tay gắp mầm làm bằng nhôm ống, có kết cấu đơn giản dể sử dụng.
Hoạt động nhờ động cơ có hộp giảm tốc , để khi hoạt động động cơ có độ hãm để giữ nguyên tay gắp ở vị trí mong muốn.
Hình 1.7. Cánh tay và động cơ kéo
- Giai đoạn 7: cơ cấu giữ xe con.
Trong quá trình thiết kế thì có một vấn đề đã phát sinh. Là khi Robot duy chuyển phần xe con sẽ bị tách ra khỏi phần thân chính. Vấn đề này cũng khá nan giải.
Sau đó, nhóm chúng em đã thiết kế thêm một phần cơ cấu để dử cho xe con không bị tách khỏi phần thân chính khi duy chuyển.
Cơ cấu này khi cấp nguồn vào thì nó sẽ hãm chặc lại giữ cho xe con không tách khỏi phần thân chính khi duy chuyển.
Hình 1.8. Cơ cấu thắng tren robo.
Sau khi thiết kế từng bộ phận, đây là Robot hoàn chỉnh:
Hình 1.8.1. Robo hoàn chỉnh
- Thi công các cơ cấu:
Thi công là một quá trình bắt tay vào công việc chế tạo để tạo nên một sản phẩm thực tế đúng với mục đích thiết kế. Theo đề tài này thì thi công là một bước công việc sau khi đã thiết kế mô phỏng các cơ cấu để có phương án thực hiện hiệu quả nhất.
- Giai đoạn 1: Thiết kế phần chính.
Song song với giai đoạn thiết kế nhóm đã tìm hiểu và sau đó chuẩn bị các nguyên vật liệu cho phần thân chính:
Động cơ chính: chọn động cơ đề, công suất lớn hơn.
Bánh xe nhôm: có đường kính d=100mm.
Nhôm: các loại nhôm hộp định hình, nhôm hộp vuông, nhôm V...
Và chuẩn bị các dụng cụ cho quá trình thi công: Cưa sắt, dũa, khoan tay ... Sau khi đã có phương hướng hợp lý từ giai đoạn thiết kế thì nhóm bắt tay ngay vào thi công :
Cắt nhôm đúng như kích thước ở phần thiết kế.
Gia công trục động cơ, lỗ bánh xe nhôm.
Sau một thời gian thi công thì nhóm cũng nhanh chóng hoàn thành phần thân chính.
- Đặc điểm:
Phần thân chính thực tế sau khi hoàn thành có hình dáng và kích thước giống với phương án thiết kế ban đầu. Đạt được các yêu cầu đã đề ra như đế xe có khối lượng nhẹ, chi phi cho phần đế thấp.
- Hạn chế:
Phần thân chính có kích thước hơi to.
Có thể thu nhỏ kích thước lại.
Mô hình thiết kế đã thi công:
................................................
CHƯƠNG 4 :KẾT LUẬN
Sau nhiều tháng tìm hiểu và thi công đồ án ‘ ROBOT TỰ ĐỘNG ‘,ban đầu chúng em gặp khá nhiều khó khăn và chưa có nhiều kinh nghiệm để khắc phục những sự cố gặp phải nhưng được sự trợ giúp của thầy cô , chúng em đã hoàn thành tốt đồ án :
- Cơ khí chạy chính xác và đáp ứng được yêu cầu của đề tài.
- Mạch điện chạy ổn định
- Các cơ cấu khá ăn khớp với nhau và hoạt động tốt.
- Những hạn chế và hướng khắc phục :
Tuy có những kết quả khả quan bước đầu nhưng không ít những thiếu sót dần được hiện ra qua thời gian nhóm thực hiện đề tài :
- Cánh tay ôm lá còn hạn chế vì khi robot bằng tay trao phôi, phôi phải đặt đúng vị trí thì tay kep mới ôm phôi được.
- Động cơ đề khó điều khiển vì khi chạy với vận tốc tối đa động cơ sẽ tạo một lực quán tính hướng về trước khi robot dừng đột ngột.
Những thiếu sót trên được nhóm tập trung xử lý để tìm ra nguyên nhân từ đó đưa ra các biện pháp khắc phục :
- Về cơ khí, với tay đẩy phôi, ban đầu tay đẩy lá chuyển động còn rít, khó di chuyển, làm cho mất nhiều thời gian khi thực hiện công việc của robot. Nhóm chúng em đã tập trung sửa chữa và khắc phục được lỗi này. Tuy chưa phải tuyệt đối nhưng đã đáp ứng được phần nào của yêu cầu của đề tài.
- Về phần động cơ, nhóm chúng em đã thử nghiệm trên động cơ đề. Động cơ khá mạnh momen lớn. nên khi chạy tạo ra một lực quán tính hướng về trước khi chạy nhanh, chúng em đã tăng độ ma sát của bánh xe bằng cách thay vỏ tạo ra những gai trên vỏ bánh xe, tạo ra lực ma sát lớn nên quán tính cũng được giảm bớt.
- Nhìn chung những mặt hạn chế trên đã khắc phục được trong thời gian thực hiện đề tài với sự hướng dẫn của Thầy và đồng thời có sự hỗ trợ của các bạn. Càng gặp nhiều khó khăn khi thực hiện đề tài chúng em càng học hỏi được nhiều và đó cũng là những khinh nghiệm quý báu trước khi chúng em ra trường.
- Hướng phát triển :
Robot có thể được cải tiến nhanh nhạy hơn, cơ cấu có thể hoàn thiện và tối ưu hơn, và robot có thể thay thế cách dò đường truyền thống là dùng mạch line bằng cách dùng cảm biền siêu âm, nhận dạng hình ảnh thông qua camera, đọc ví trí bằng LM629, dò đường bằng la bàn điện tử và cho robot nhớ các sự kiện đã diễn ra (có thể lưu trên file ‘txt hay excel’) để từ đó có thể biết được các lỗi mà robot gặp phải trong quá trình hoạt động. Robot có thể đưa vào ứng dụng trong cuộc sống thay thế con người làm những công việc nặng và nguy hiểm..
TÀI LIỆU THAM KHẢO
- “ Thiết kế chi tiết máy ” – Nguyễn Trong Hiệp, Nguyễn Văn Lẫm –NXB Giáo dục, năm 2004.
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON QUỐC TẾ 2014 điều khiển TỰ ĐỘNG











