ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON QUỐC TẾ 2014 THE MANUAL ROBOT AREA




NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON QUỐC TẾ 2014 THE MANUAL ROBOT AREA
MỤC LỤC
LỜI MỞ ĐẦU……………………………………………………………………….
LỜI CẢM ƠN……………………………………………………………………….
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN…………………………………...
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN……………………………………..
NHẬN XÉT CỦA HỘI ĐỒNG CHẤM ĐỒ ÁN TỐT NGHIỆP…………………
MỤC LỤC……………………………………………………………………………
DANH SÁCH HÌNH VẼ……………………………………………………………
CHƯƠNG I: ĐẶT VẤN ĐỀ………………………………………………...............1
- Lý do chọn đề tài………………….…………………………………………1
- Nhiệm vụ đề tài………………………………………….…………………...1
- Giới thiệu………...………………………………………………….1
- Nhiệm vụ…………………………………………………………….2
- Hướng thực hiện……………………………………………………..3
- Khó khăn…………………….……………………………………….4
- Giải quyết vấn đề…………….………………………………………4
CHƯƠNG II: THIẾT KẾ VÀ THI CÔNG………………………………………
- Cơ khí……………………………………………………………………..….
- Tính toán chọn động cơ……………………………………….……..5
-
Thiết kế….…………………………………………………………..6
- Giai đoạn 1:thiết kế robot…………………………………….6
2.1.1 phương án 1…….……………………………………..7
2.1.2 phuong án 2……………………………….…………11
2.2 Giai đoạn 2: Thiết kế tay gắp……….……………………12
2.2.1 phương án 1…………………………….……………12
2.2.2 phương án 2……………………………………...…..13
2.3 Thiết kế thanh trượt ngang……………..…………………..15
2.4 Thiết kế ụ trượt…………………………..…………………17
II. Điện tử……………….……………………………………………….........19
-
Mạch điện tử………..………………………………………………19
- Mạch công suất chính……………………………………19
- Mạch công suất phụ………..……………………………20
-
Giới thiệu một số linh kiện….....………………………..21
- Relay…………………………………………..21
- Opto PC817……………………………………21
- Mosfet 3205…………………………..……….22
-
Cấu tạo và ký hiêu Mosfet………………………………………23
- Cách kiểm tra Mosfet.…………..……………………..24
-
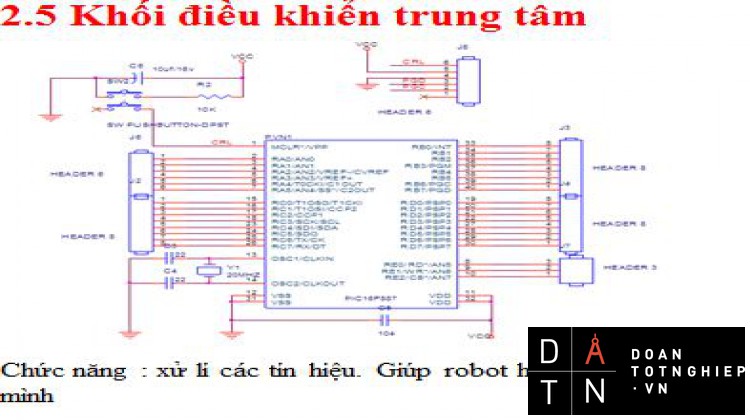
Mạch Vi Điều Khiển…….……………………………………...25
- Nguyên lý hoạt động…..………………………………25
- Tổng quan về Pic 16f887…….………………………..26
DANH MỤC HÌNH ẢNH
CHƯƠNG I. ĐẶT VẤN ĐỀ………………………
Hình 1.1: Sân thi đấu robocon.
Hình 1.2: Lưu đồ tiến độ hoàn thành công việc.
CHƯƠNG II. THIẾT KẾ VÀ THI CÔNG………………………..
Hình 1.1: Dụng cụ thiết kế : cưa.
Hình 1.2: Dụng cụ thiết kế: kềm bắn IV.
Hình 1.3: Nhôm định hình các loại.
Hình 1.4: Mica dạng tấm.
Hình 2.1.1: Thiết kế khung xe cho phương án 1.
Hình 2.1.2: Động cơ chính (chủ động).
Hình 2.1.3: Bánh xe chủ động.
Hình 2.1.4: Bánh xe bi cầu (bánh mắt trâu).
Hình 2.1.5: Buli hai rãnh lắp dây curoa.
Hình 2.1.6: Thiết kế khung xe cho phương án 2.
Hình 2.2.1: Thiết kế tay gắp cho phương án 1.
Hình 2.2.2: Thiết kế tay gắp cho phương án 2.
Hình 2.2.3: Tay gắp mầm có gắn ống xốp mềm.
Hình 2.3.1: Thanh trượt ngoài.
Hình 2.3.2: Thanh trượt trong.
Hình 2.3.3: Con lăn đặt trong thanh trượt.
Hình 2.4.1: Ụ trượt.
Hình 2.4.2: Ổ bi.
Hình 2.4.3: Bộ truyền xích bánh xích.
Hình 2.4.4: Ụ trượt trên trục chính.
Hình 2.4.5: Ụ trượt ngang.
Hình 2.5.1: Cơ cấu bắn.
Hình 2.5.2: Mô hình hoàn chỉnh.
CHƯƠNG III. ĐIỆN TỬ……………………………………….
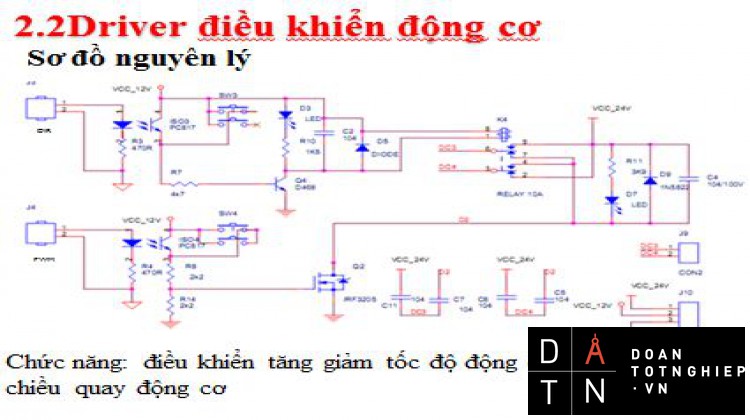
Hình 1.5.1: Mạch công suất chính.
Hình 1.5.2: Mạch công suất phụ.
Hình 1.5.3: Mosfet 3205 thực tế.
Hình 1.5.4: Sơ đồ nguyên lý Mosfet kênh N, kênh P.
Hình 1.5.5 Ký hiệu, cấu tạo Mosfet.
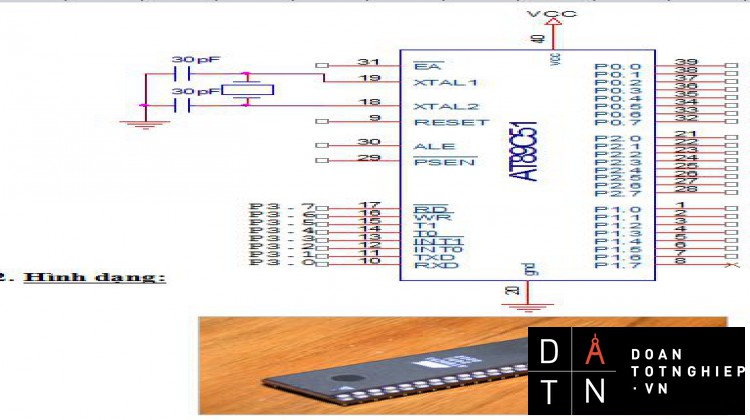
Hình 1.6.1: Mạch vi điều khiển.
Hình 1.6.2: Mạch nguồn cho vi điều khiển.
Hình 1.6.3: Tổng quan về Pic.
CHƯƠNG IV. LẬP TRÌNH……………………………………..
Hình 1.6.4: Cú pháp sử dụng hàm switch case.
Hình 1.6.5: Lưu đồ giải thuật & chương trình con.
CHƯƠNG I: ĐẶT VẤN ĐỀ
- Lý do chọn đề tài:
Hiện nay phong trào tham gia robocon đang là một trong những đề tài nóng bỏng, được các bạn sinh viên ngành kỹ thuật quan tâm. Đó là một sân chơi đầy thử thách nhằm vận dụng những kiến thức đã được học vào môi trường thực tiễn, đồng thời là sân chơi để chúng ta có thể trao dồi thêm kiến thức, là nơi tiếp xúc học hỏi lẫn nhau. Đặt biệt, ngành công nghệ kỹ thuật cơ điện tử là một trong những ngành được đánh giá là đầy đủ trình độ cũng như chuyên môn để tham gia sân chơi này. Do đó nhóm chúng em chọn đề tài robocon 2013 làm đề tài tốt nghiệp.

- Nhiệm vụ đề tài:
- Giới thiệu:
Hình 1.1
Sân thi đấu là khu vực có kích thước là 13x13m, được chia đều cho hai đội bằng một hàng rào sắt dọc theo đường kinh tuyến góc, vùng trái đất có đường kính là 8.5m, có các đường dẫn trắng tượng trưng cho các đường kinh tuyến và vĩ tuyến.
Có 7 ô trống để đặt lá cho mỗi đội, mỗi ô trống có đường kính lòng trong là 350mm và cao 50mm.
Bán cầu Bắc là nửa trên cua vùng trái đất, 4 ô ở giữa là vùng chung, phía trên là vùng cực Bắc.
Bán cầu Nam là nữa dưới của vùng trái đất, cũng được bố trí 4 ô như ở bán cầu Bắc.
Cách cực Bắc 2.7m nằm trên đường kéo dài của đường kinh tuyết góc, mặt trăng được đặt trên một trụ sắt có đường kính là 500mm và cách mặt sân thi đấu là 1500mm. Có hai đường giới hạn một và hai cách nhau một đoạn là 2,95m.
Vùng hoạt động của robot điều khiển bằng tay là vùng không gian được sơn màu xanh lục lam, khu xuất phát của robot bằng tay có kích thước là 700mmx700mm. Kho chứa lá của mỗi đội dược đặt ở phía dưới của sân thi đấu, lá là khối hình trụ đặt có kích thước là cao 200mm và có đường kính là 250mm.
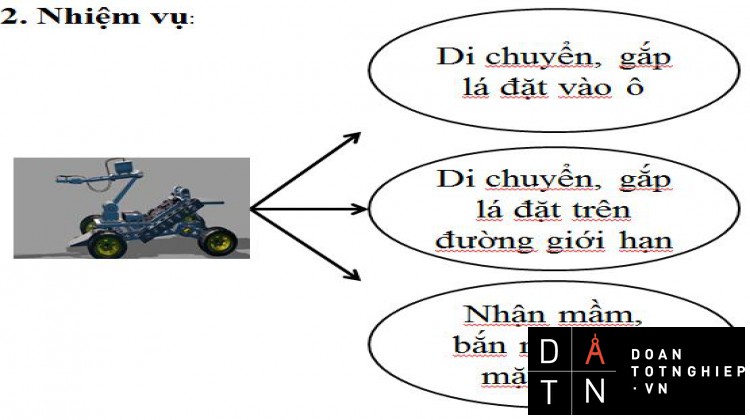
- Nhiệm vụ:
Robot the manual robot area được điều khiển đến vùng chứa lá, tiến hành gắp lá và di chuyển đến các ô trống ở bán cầu Nam, mỗi lá gắn thành công sẽ ghi được 10 điểm. Sau đó tiếp tục di chuyển đến vùng chứa lá, gắp lá bỏ trên đường giới hạn một cho robot tự động tiến hành gắp lá hoàn thành nhiệm vụ.
Sau khi robot tự động bỏ lá xong và di chuyển đến vùng chứa mầm, gắp mầm cho robot bằng tay bắn vào vùng mặt trăng. Nếu hoàn thành thì trận đấu kết thúc.
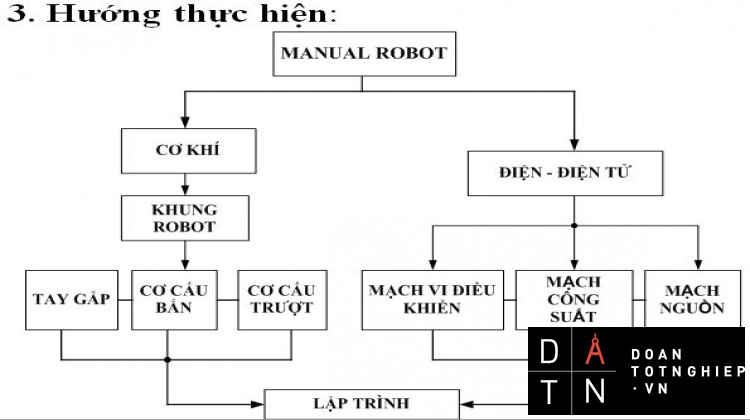
- Hướng thực hiện:
- Khó khăn:
- Chưa đưa ra được phương án thiết kế, ý tưởng hợp lý nhất cho mô hình.
- Mới bước đầu bắt tay vào làm nhóm chúng em còn gặp bỡ ngỡ, không biết nên thực hiện công việc nào trước và công việc nào sau.
- Thiếu kinh nghiệm trong việc mua các nguyên vật liệu, công cụ cần thiết phục vụ cho công việc.
- Chưa đưa ra được bản vẽ hợp lý dẫn đến những sai xót trong quá trình giai công tạo ra nhiều phế phẩm.
- Tốn nhiều chi phí.
- Giải quyết vấn đề.
- Những phần cơ khí và mạch điện tử được nhóm chúng em thực hiện song
song và chia công việc cho từng thành viên để có thể hoàn thành công việc
nhanh nhất.
- Đi mua ngoài thực tế vài lần và thông qua các thầy, các cô, các anh chị
khóa trước, các bạn khác có kinh nghiệm hơn để bổ sung cho sự thiếu hiểu
biết của mình.
- Tham khảo các tài liệu thực tế trên mạng, tham khảo các mô hình, cơ cấu truyền động thực tế của những khóa trước từ đó đưa thiết lập ý tưởng và đưa ra ý tưởng hợp lý nhất.
CHƯƠNG II: THIẾT KẾ VÀ THI CÔNG
Những kết cấu cơ khí, điện – điện tử, lập trình được nhóm tìm hiểu và tiến hành
thực hiện các bước song song .
I. CƠ KHÍ.
Đề tạo nên một con robot hay một mô hình sản phẩm hoàn chỉnh và hạn chế đến
mức thấp nhất những nhược điểm khó khăn khi sử dụng, cũng như chi phí tạo nên
một sản phẩm, thì vấn đề cần quan tâm nhất là đề các phương án giải quyết tối ưu
nhất phù hợp với mục tiêu của đề tài. Về đề tài THIẾT KẾ-CHẾ TẠO ROBOT thì
nhóm đã tìm hiểu tính toán và đề ra các phương án tối ưu nhất qua các giai đoạn.
Sau đó bắt tay vào thi công những phương án đã chọn.
- Chọn vật liệu, dụng cụ hổ trợ và tính toán chọn động cơ.
- Các vật liệu, dụng cụ hổ trợ:...........................
- ....................
- Hình 1.3 Hình 1.4
Ngoài ra, còn sử dụng thêm một số vật liệu và dụng cụ khác như: dũa, bu-lông đai ốc, khoan tay,…
- Chọn động cơ:
- Số vòng quay chưa qua bộ giảm tốc n = 1500 vòng/ phút , số vòng quay của
động cơ qua bộ truyền đai là (1:7) n = 214 vòng/phút và ta có vận tốc di chuyển robot
V=1.1m/s.
- Lực tác dụng : P = 15kg=150N
- Công suất tải:
Nt = M.n= 150.0,05.0,1.2.3,14.3,6= 17W
Trong đó:
- Nt : Công suất tải của động cơ chính.
- N ct : Công suất cần thiết.
. η = η1. (η2 )3 = 0.96. 0.993= 0.93.
Trong đó : η : Hiệu suất bộ truyền.
η1= 0,96– hiệu suất bộ truyền đai.
η 2 = 0,99 – hiệu suất của một cặp ổ lăn.
Công suất cần thiết:
- N ct = Nt/ η = 17/0,93 = 18,3W.
- Cần phải chọn động cơ có công suất lớn hơn công suất cần thiết:
2. Thiết kế.
Hai công đoạn này được thực hiện song song để nhanh chóng hoàn thành và
có một phương án thiết kế tối ưu nhất cho giai đoạn thi công .
- Giai đoạn 1:
Thiết kế đế robot: là phần thân chính dưới cùng của robot tự động, rất quan trọng dùng đề đưa toàn bộ robot tự động di chuyển trên sân thi đấu.
Phần khung đế làm bằng nhôm định hình trên lắp động cơ chính, bánh xe chủ động (bánh nhôm), bánh bi (bánh mắt trâu) và các thành phần khác của robot như: thanh trượt ngang, thanh trượt dọc, tay kẹp, cơ cấu bắn,…Dưới đây là các phương án thiết kế đế robot mà nhóm đã đề ra và vẽ mô phỏng kích thước thực tế, từ đó sẽ có thể phát hiện ra vấn đề bất hợp lý mà ta chưa tìm thấy.
2.1.1 Phương án 1:
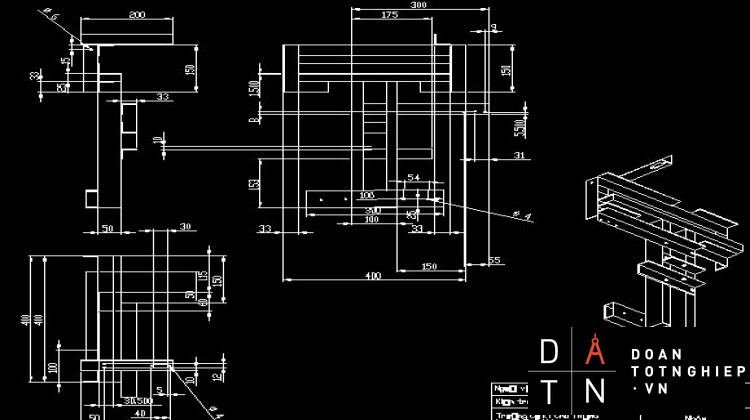
Hình 2.1.1
Ở phương án 1 phần khung đế robot có kết cấu dự kiến khá đơn giản, kích thước khung 500x600 mm, được làm bằng nhôm ống định hình.
Hình 2.1.3
- Thông số bánh xe chủ động:
- Khối lượng 210g,tải trọng 50kg.
- Đường kính ngoài 100mm.
- Bề rộng 35mm.
- Có gia công thêm hai rãnh để lắp dây curoa ,kếp hợp Buli đường kính 13mm tạo thành cơ cấu truyền hệ số 1:7. Động cơ 20 đến 50W, tốc độ 1500 đến 4000rmp gắn vào Buli có thể chạy tốt robot tự động.
- Ngoài ra có thể gắn bạc đạn( ổ bi) để làm bánh xe thụ động.
- Bánh xe được đúc bằng nhôm có độ bền cao, vỏ được bọc silicon mềm có nhiều rãnh nên có độ bám cao.
Phía sau đế robot gắn động cơ chính ( hình 2.1.2 ) và trên động cơ chính có gắn bánh xe nhôm ( hình 2.1.3 ) . Còn phía trước robot tự động gắn bánh xe mắt trâu ( như hình 2.1.4 ) có d=40mm để robot tự động có thể di chuyển một cách linh hoạt trên sân thi đấu.
.............................................................
CHƯƠNG III. KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN
- Kết quả:
- Kết quả đạt được:
Sau thời gian nghiên cứu và tìm hiểu về đề tài thiết kế và chế tạo ROBOCON và thực hiện các công việc song song tuy gặp không ít khó khăn, trở ngại khi thực hiện đề tài nhưng nhờ có sự hỗ trợ và giúp đỡ tận tình của thầy cô bộ môn, đặc biệt là thầy hướng dẫn NGUYỄN NGỌC THÔNG nên đề tài của nhóm chúng em đạt được kết quả khả quan, đó cũng là niệm động lực để nhóm hoàn thiện đề tài tốt hơn như:
+ Cơ khí cũng đã đáp ứng được yêu cầu của đề tài.
+ Mạch điện - điện tử hoạt động tương đối ổn định.
+ Các cơ cấu được hoàn thiện và hoạt động khá thành công.
- Nhìn chung robot hoạt động khá tốt, đáp ứng được yêu cầu của đề tài.
- Hạn chế và hướng khắc phục:
- Tuy có những kết quả khả quan bước đầu nhưng cũng có không ít những thiếu xót trong quá trình thực hiện:
+ Tay kẹp còn chậm làm mất nhiều thời gian khi gắp mầm.
+ Ro bot thiếu linh hoạt khi di chuyển.
+ Sử dụng bộ truyền động phức tạp, khó lắp ráp.
+ Do thiết kế thanh trượt hơi dài, liên kết yếu khi di chuyển làm tay gắp mầm không cố định gây khó khăn trong việc gắp mầm và thả mầm.
+ Cơ cấu bắn chưa chính xác bởi điều chỉnh bằng cảm nhận, quan sát của con người.
Những thiếu xót trên được nhóm tập trung xử lý và tìm ra nguyên nhân và từ đó đưa ra phương án khắc phục:
+ Về cơ khí: thiết kế và tiến hành lắp ráp, trong quá trình thiết kế tính toán đã xảy ra sai số, đồi hỏi người gia công cơ khí phải tính toán thật chính xác, việc sai số vẫn cho phép nhưng phải còn nằm trong giới hạn cho phép.
+ Cần thay đổi bộ truyền động xích bằng hệ thống khí nén, pit-tông nhằm làm robot linh hoạt hơn khi hoạt động.
+ Cần cải tiến cơ cấu bắn để nâng cao độ chính xác đến đích, đồng thời giảm tiếng ồn do khâu bắn gây ra.
- Hướng phát triển:
+ Thay đổi các bộ truyền xích bằng khí nén.
+ Cải tiến cơ cấu bắn.
+ Thiết kế tay kẹp bằng pit-tông nhằm rút ngắn thời gian lấy lá.
- Tài liệu tham khảo:
- Thiết kế ch tiết máy – Nguyễn Trong Hiệp & Nguyễn Văn Lẫm – NXB Giáo Dục, 2004.
- Diễn đàn: http// dientuvietnam.net.
- Diễn đàn: http//hoiquandtvt.net.









