THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN THIẾT KẾ VÀ THI CÔNG THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM, thuyết minh THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM, ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM
TỔNG QUAN MÔ HÌNH
* Giới thiệu mô hình:
Mô hình sấy sản phẩm được điều khiển tự động bởi S7- 300. Mô hình sấy nhận sản phẩm (phôi) từ mô hình gia công sản phẩm được băng tải chuyển tới buồng sấy, và được chuyển tới mô hình lưu kho.
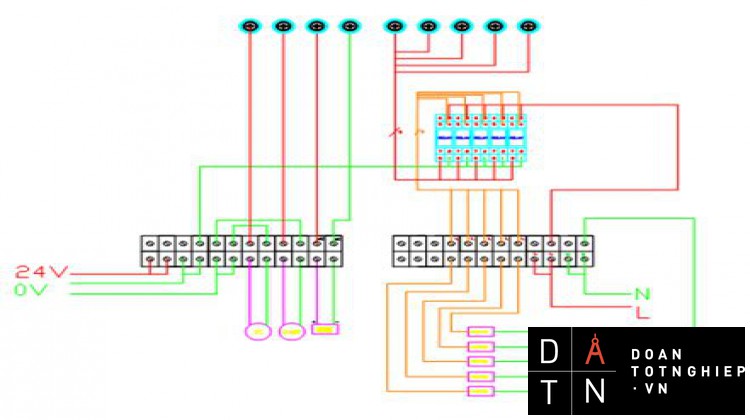
* Sơ đồ điện:
CHƯƠNG 1: CẢM BIẾN ĐO NHIỆT ĐỘ
1. 1. Khái niệm cơ bản:
Nhiệt độ là một trong số các đại lượng có ảnh hưởng rất lớn đến tính chất vật chất. Bởi vậy trong nghiên cứu khoa học, trong công nghiệp cũng nhu trong đời sống hàng ngày việc đo nhiệt độ là rất cần thiết. Tuy nhiên việc xác định chính xác một nhiệt độ là một vấn đề không đơn giản. Đa số các đại lượng vật lý điều có thể xác định trược tiếp nhò so sánh voi đại lượng cùng bản chất. Nhiệt độ là một đại lượng chỉ có thể đo gián tiếp dựa vào sự phụ thuộc của tính chất vật liệu vào nhiệt độ.
1.1.1 Thang đo nhiệt độ:
Để đo nhiệt độ trước hết phải thiết lập thang đo nhiệt độ. Thang nhiệt độ tuyệt đối được thiết lập dựa vào tính chất của khí lý tưởng.
Theo định lý Carnot ; Hiệu suất η của một động cơ nhiệt thuận nghịch hoạt động giũa hai nguồn nhiệt độ θ1 và θ2 trong một thang đo bất kỳ chỉ phụ thuộc vào θ1 và θ2
η =
Dạng của hàm F phụ thuộc vào thang đo nhiệt độ. Ngược lại việc chọn hàm F sẽ quyết định thang đo nhiệt độ. Đặc F(θ) = T, khi đó hiệu suất của động cơ nhiệt thuận nghịch được viết như sau:
η =1-
Trong đó T1 và T2 là nhiệt độ động học tuyệt đối của hai nguồn.
Đối với chất khí lý tưởng, nội năng U chỉ phụ thuộc vào nhiệt độ của chất khí và phương trình đặt trưng liên hệ giũa áp suất p, thể tích v và nhiệt độ có dạng:
p.v=G(θ)
Có thể chứng minh được rằng:
G(θ)= RT
Trong đó G là hằng số lý tưởng, T là nhiệt động học tuyệt đối.
Để có thể gán một giá trị cho T, cần phải xác định đơn vị nhiệt độ. Muốn vậy chỉ cần gán giá trị cho nhiệt độ tương ứng nào đó với điều kiện hiện tượng này hoàn toàn xác định và có tính lập lại.
Thang Kelvin (ThomSon Kelvin - 1852): Thang nhiệt động học tuyệt đối, đơn vị nhiệt độ là K. Trong thang đo này người ta gán cho nhiệt độ cân bằng ba trạng thái nước – nước đá – hơi một chỉ số bằng 273,15K.
Thang Celsius ( Andreas Celsius – 1742): Thang nhiệt độ bách phân, đơn vị nhiệt độ là 0C và một độ Celsius bằng một độ Kelvin.
Thiệt độ Celsius xác định qua nhiệt độ Kelvin theo biểu thức:
T(0C) =T(K) – 273,15
Thang Fahrenheit( Fahrenheit – 1760): Đơn vị la độ 0F. Trong thang đo nay nhiệt độ của điểm nước đá tan là 230F và điểm nước sôi là 2120F
Quan hệ giũa độ Fahrenheit va độ Celsius:
T0C = { T(0F) – 32}
T0F = { T(0C) + 32}
1.1.2 Nhiệt độ đo được và nhiệt độ cần đo:
Giả sử môi trường đo có nhiệt độ thực Tx, nhung khi đó ta chỉ nhận được là nhiệt độ Tc là nhiệt độ của phần tử cảm nhận của cảm biến. Nhiệt độ Tx là nhiệt độ cần đo, nhiệt độ Tc la nhiệt độ đo được. Điều kiện để đo đúng nhiệt độ là phải có sự cân bằng nhiệt giữa môi trường đo và cảm biến. Tuy nhiên, do nhiều nguyên nhân, nhiệt độ cảm biến không bao giời đạt tới nhiệt độ môi trường Tx. Do đó tồn tại một chênh lệch nhiệt độ Tx – Tc nhất định. Độ chính xác của phép đo phụ thuộc và hiệu số Tx – Tc, hiệu số này càng bé, độ chính xác của phép đo càng cao, muốn vậy khi đo cần phải:
- Tang cường sự trao đổi nhiệt giũa bộ cảm biến và môi trường đo.
- Giảm sự trao đổi nhiệt giũa cản biến và môi trường bên ngoài.
Chúng ta hãy khảo sát trường hợp đo bằng cảm biến tiếp xúc. Lượng nhiệt truyền từ môi trường vào bộ cảm biến xát định theo công thức:
dQ = αA(Tx – Tc)dt
với α là hệ số dẫn nhiệt.
A là diện tích bề mặt trao đổi nhiệt.
T là thời gian trao đổi nhiệt.
Lượng nhiệt cảm biến hấp thụ :
dQ = mCdTc
với : m - khối lượng cảm biến.
C – nhiệt dung của cảm biến
Nếu bỏ qua tổn thất nhiệt của cảm biến tỏa ra môi trường ngoài và giá đở, ta có :
αA(Tx – Tc)dt = mCdTc
Đặc , gọi là hằng số thời gian nhiệt, ta có :
Nghiệm của phương trình có dạng :
Để tăng cường trao đổi nhiệt giũa môi trường có nhiệt độ cần đo và cảm biến ta cần phải dùng cảm biến co phần tử cảm nhận có tỉ lệ thấp, hệ số dẫn nhiệt cao, để hạn chế nhiệt tổn thất từ cảm biến ra ngoài thì các tiếp điểm dẫn từ phần tử cảm nhận ra mạch đo bên ngoài phải có hệ số dẫn nhiệt thấp.
1.1.3. Phân loại cam biến đo nhiệt độ:
Cảm biến đo nhiệt độ được chia làm hai nhóm :
- Cảm biến tiếp xúc : Cảm biến tiếp xúc voi môi trường đo, gồm :
+ Cảm biến giản nở ( nhiệt kế giản nở).
+ Cảm biến điện trở ( nhiệt điện trở).
+ Cặp nhiệt ngẫu
- Cảm biến không tiếp xúc : Hỏa kế
1. 2. Nhiệt kế giãn nở :
Nguyên lý hoat động của nhiệt kế giảm nở dựa vào sự giãn nở của vật liệu khi tăng nhiệt độ. Nhiệt kế này có ưu điểm là đơn giảm, dễ chế tạo.
1.2.1. Nhiệt kế giãn nở dùng chất rắn:
Thường có hai loại : Gốm và kim loại, kim loai và kim loại.
- Nhiệt kế gốm – kim loại (Dilatomet) : Gồm loại thanh ống (1) đặt trong ống kim loại (2), một dầu thanh gốm liên kết với ống kim loại, con đầu A nối với hệ thống truyền động tới bộ chỉ thị. Hệ số giãn nở của kim loại αk và của gốm αg . Do αk > αg khi nhiệt độ tăng một lượng dt, thanh kim loại giãn thên một lượngdlk, thanh gốm giãn thêm dlg với dlk > dlg, làm cho thanh gốm dịch sang phải, dịch chuyển của thanh gốm phụ thuộc vào dlk - dlg do đóphụ thuộc nhiệt độ.
- Nhiệt kế kim loại – kim loại : Gồm hai thanh kim loai (1) và (2) có hệ số giãn nở nhiệt khác nhau liên kết với nhau theo chiều dọc. Giả α1 – α2, khi giãn nở nhiệt hai thanh kim loại cong về phía thanh (2), dụa vào độ công của kim loại có thể xác định nhiệt độ.
Nhiệt kế giản nở dung chất rắn thường dùng để đo nhiệt dộ dưới 700oC.
1.2.2. Nhiệt kế giản nở dung chất lỏng:
Nhiệt kế gồm binh nhiệt (1), ống mao dẫn (2) và chất lỏng (3). Chất lỏng thường dùng là thủy ngân có hệ số giản nở α = 18.10-5/oC, vỏ nhiệt kế bằng thủy tinh α=2.105/oC.
Khi đo nhiệt độ, bình nhiệt được đặc tiếp xúc với môi trường đo. Khi nhiệt độ tăng, chất lỏng giản nở và dân lên trong ống mao. Thang đo được chia độ trên vỏ theo dọc trên ống mao dẫn.
Dãy nhiệt độ làm việc -50 ÷ 600oC tùy theo vật liệu chết tạo vỏ bọc.
1.3. Nhiệt kế điện trở :
1.3.1 Nguyên lý:
Nguyên lý chung đo nhiệt độ bằng các điện trở là dựa vào sự phụ thuoc diện trở suất của vật liệu theo nhiệt độ.
Trong trường hợp tổng quát, sự thay đổi diện trở theo nhiệt độ có dạng :
R(T) = Ro.F(T – To)
Ro là điện trở của nhiệt độ To
F là hàm đặc trương cho vật liệu và F = 1 khi T = To
Hiện nay thường sử dụng ba loại diện trở đo nhiệt độ đó là : Điện trở kim loại, điện trở silic và điện trở chế tạo bằng hổn hợp Oxyt bán dẫn.
Trường hợp điện trở kim loại, hàm trên có dạng :
R(T) = Ro.exp[B()]
T là nhiệt độ tuyệt đối
B là hệ số thực nghiệm
Các hệ số được xác định chính xác bằng thực nghiệm khi đo những nhiệt dộ đã biết trước. Khi dã biết được giá giạ các hệ số, từ giá trị của R người ta xác định được nhiệt độ cần đo.
Khi độ biến thiện của nhiệt độ là ∆T (xung quanh giá trị T) nhỏ, diện trở có thế coi như thai đổi theo hàm tuyến tính :
R(T + ∆T) = R(T)(1 + αR∆T)
Trong đó :
αR =
được gọi hệ số nhiệt của điện trở hay gọi la độ nhạy nhiệt ở nhiệt độ T. Độ nhạy nhiệt phụ thuộc vào vật liệu và nhiệt độ.
Thực ra, điện trở không chỉ thay đổi khi nhiệt độ thay đổi do sự thay dổi diện trở suất mà còn chịu tác động sự thay đổi kích thước hình học của nó bởi vậy đối với một điện trở dây có chiều dày l và tiết diện s, hệ số nhiệt độ có dạng :
αR = αρ + αl - αs+
với αs = 2 αl Ta có αR = αρ - αl
Trên thực tế thường αρ > αl nên có thể coi αR = αρ
1.3.2. Nhiệt kế điện trở kim loại:
a. Yêu cầu đối với vật liệu làm điện trở:
- Có điện trở suất ρ dủ lớn de963 điện trở ban đầu Ro lớn mà kích thước vẫn nhỏ.
- Hệ số nhiệt điện trở nhiệt của nó tốt nhất là luôn luôn không đổi dấu, không triệt tiêu.
- Có đủ độ bền cơ, hóa ở nhiệt độ làm việc.
- Dễ gia cong và khả năng thay lẫn.
Các cảm biến nhiệt thường được chế tạo bằng Pt và Ni. Ngoài ra còn có Cu và W.
b. Cấu tạo nhiệt điện trở kim loại:
Dể tránh sự làm nóng đầu đo dòng điện chạy qua điện trở thường giới hạn ở giá trị một vài mA và điện trở có độ nhạy nhiệt cao thì điện trở có giá trị đủ lớn. Muốn vậy phải giảm tiết diện dây hoặc tăng chiều dài dây dẫn. Tuy nhiên giảm tiết diện dây độ bền lại thấp, dây điện trở để bị đứt, việc tang chiều dài lại làm tăng kích thước. Để hợp lý người ta chọn R ở 0oC có giá trị vào khoảng 100![]() , khi đó với điện trở platin sẽ có đường kính dây cỡ vài
, khi đó với điện trở platin sẽ có đường kính dây cỡ vài ![]() m và chiều dài khoảng 10cm sau khi quấn lại sẽ đươc nhiệt kế có chiều dài cở 1cm. Các sản phẩm thương mại thường có điện trở ở 0oC là 50
m và chiều dài khoảng 10cm sau khi quấn lại sẽ đươc nhiệt kế có chiều dài cở 1cm. Các sản phẩm thương mại thường có điện trở ở 0oC là 50![]() , 500
, 500![]() và 1000
và 1000![]() , các điện trở lớn thườn được dùng để đo o dãy nhiệt độ thấp.
, các điện trở lớn thườn được dùng để đo o dãy nhiệt độ thấp.
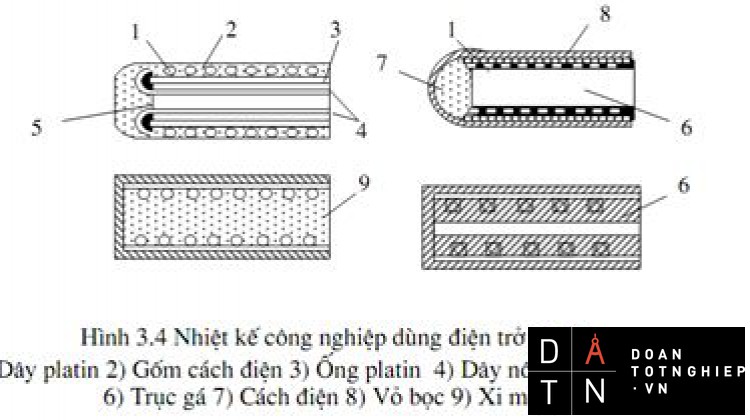
-Nhiệt kế công nghiệp: Để sử dụng cho mục đích công nghiệp, các nhiệt kết
phải có vở bọc tốt chống được va chạm và run động, điện trở được cuốn và bao bọc trong thủy tinh hoặc gom61va2 dặt trong vỏ bảo vệ bằng thép
- Nhiệt kế bề mặt
Dùng để đo nhiệt độ trên bề mặt của vật rắn. Chúng thường được chế tạo bằng phương pháp quang hóa và sử dụng vật liệu làm điện trở là Ni, Fe – Ni hoặc Pt. Cấu trúc của thiết kế bề mặt như nhình vẽ. Chiều dầy lớp kim loại cỡ vài ![]() m và kích thước nhiệt kết cỡ 1Cm2
m và kích thước nhiệt kết cỡ 1Cm2
Đặc trưng của nhiệt kế bề mặt:
- Độ nhạy nhiệt: ~ 5.10-3/oC đối với trường hợp Ni, Fe – Ni
~4.10-3/oC đối với trường hợp Pt
- Dãy nhiệt sử dụng -195oC ÷ 290oC đối với trường hợp Ni, Fe – Ni
-260oC ÷ 1400oC đối với trường hợp Pt
Khi sử dụng nhiệt kế bề mặt cần đặc biệt chú ý đến ảnh hưởng biến dạng của bề mặt đo.
1.3.3. Nhiệt kế điện trở silic:
Silic tinh khiết hoặc đơn tinh thể silic có hệ số nhiệt điện trở âm tuy nhiên khi được kích tạp loai n thì trong khoảng nhiệt độ thấp chúng lại có hệ số điện trở dương, hệ số điện trở ~ 0.7%oC ở 25oC. Phần tử cảm nhận nhiệt của cảm biến silic được chế tạo có kích thước 500x500x240 m được mạ kim loại ở một phía còn phía kia là bề mặt tiếp xúc.
Trong dãy nhiệt độ làm việc (-55oC ÷ 200oC) có thể lấy giá trị điện trở của cảm biến theo nhiệt độ theo công thức:
RT = Ro[1+A(T-To)+B(T-To)2]
Trong đó Ro và To là điện trở và nhiệt độ tuyệt đối ở điểm chuẩn.
Sự thai đổ nhiệt của điển trở tương đối nhỏ nên có thể tuyến tính hóa bằng cách mắc them điện trở phụ.
1.3.4. Nhiệt kế điện trở oxyt bán dẫn:
a. vật liệu chế tạo
Niệt điện trở được chế tạo từ hỗn hợp oxyt bán dẫn đa tinh thể như: MgO, MgAl2O4, Mn2O3, Fe3O4, Co2O3, NiO, FeTiO4.
Sự phụ thuộc của nhiệt điện trở theo nhiệt độ cho bởi biểu thức.
R(T) = Ro[]2.exp{()} (3.11)
Trong đó Ro() la điện trở ở nhiệt độ To(K).
Độ nhạy nhiệt
Vì ảnh hưởng của hàm mũ đến điện trở chiếm ưu thế nên biểu thức (3.11) viết lại:
R(T) = Ro.exp{()}
Và dộ nhạy nhiệt
Với có giá trị trong khoảng 3.000 – 5.000K
b. Cấu tạo
hỗn hợp bột oxyt được trộn theo tỉ lệ thích hợp sao đó được nén định dạng và thiêu kết ở nhiệt độ 1000oC. Các dây nối kim loại được hàn tại hai điểm trên bề mặt và được phủ bằng một lớp kim loại. Mặt ngoài có thể bọc bởi vỏ thủy tinh.
Điện trở có độ nhạy nhiệt rất cao nên có thể dùng để phát hiện những biến thiên nhiệt độ rất nhở cở 10-4 – 10-3K. Kích thước cảm biến nhỏ có thể đo nhiệt độ tại từng điểm. Nhiệt dung cảm biến nhỏ nên thời gian hồi đáp nhỏ. Tùy thuộc thành phần cấu tạo dãy nhiệt độ làm việc của cảm biến nhiệt điện trở từ vài độ đến 300oC
1.4 Cảm biến nhiệt ngẫu:
1.4.1. Hiệu ứng nhiệt điện:
Pương pháp đo nhiệt độ bằng cảm biến nhiệt ngẫu dựa trên cơ sở hiệu ứng nhiệt điện. Người ta nhận thấy rằng khi hai dây dẫn chế tạo từ vật liệu có bản chất hóa học khác nhau được nối vói nhau bằng mối hàn thành một mạch kính và nhiệt độhai mối hàn là t và to khác nhau thì trong mạch xuất hiện một dòng điện. Sứcđiện động xuất hiện do hiệu ứng nhiệt điện gọi là sức điện động nhiệt điện. Nếu một dầu của cập nhiệt ngẫu hàn với nhau, còn đầu thứ hai dể hở thì giữa hai cực suất hiện một hiệu điện thế. Hiện tượng trên có thể giải thích như sau:
Trong kim loại luôn luôn tồn tại một nồng độ điện tử tự do nhất dịnh phụ thuộc bản chất kim loại và nhiệt độ. Thong thường nhiệt độ tăng, nồng độ điện tử tăng.
Giả sử ở nhiệt độ to nồng độ điện tử trong A là NA(to), trong B là NB(to) và ở nhiệt độ t nồng độ điện tử trong A la NA(t), Trong B là NB(t). Nếu NA(to) > NB(to) thì nói chung NA(t) > NB(t) .
Xét dầu làm việc (nhiệt độ t), do NA(t) > NB(t) nên có sự khuyết tán điện tử từ A ¦ B và chổ tiếp xúc xuất hiện một hiệu điện thế eAB(t) có tác dung cản trở sự khuyết tán. Khi đạt cân bằng eAB(t) sẽ không đổi.
Tương tự tại mặt tiếp xúc ở dầu tự do (nhiệt độ to) cũng xuất hiện hiệu điện thế eAB(t0).
Giũa hai đầu của một dây dẫn cung có chenh lệch nồng độ điện tử tự do. Do đó cung có sự khuyết tán điện tử và hình thành hiệu điện thế tương ứng trong A là eA(t,to) và trong B là eB(t,to).
Suất điện động tổng sinh ra do hiệu điện thế nhiệt điện xát định bỏi công thức:
EAB = eAB(t)+ eBA(t0)+eA(to,t)+eB(t,to) (3.11)
Vì eA(to,t) và eB(t,to) nhỏ và ngược chiều nhau ta có thể bỏ qua, nen ta có:
EAB = eAB(t)+ eBA(t0) (3.12)
Nếu nhiệt độ hai mối hàn bằng nhau, chẳng hạn bằng to khi đó sức điện động tổng:
EAB = eAB(t0)+ eBA(t0) =0 (3.13)
Hay:
eBA(t0) = - eAB(t0) (3.14)
Như vậy:
EAB = eAB(t0) - eAB(t0) (3.15)
Phương trình (3.15) goi là phưng trình cơ bản của cập nhiệt ngẫu. Tử phương trình (3.15) nhận tahy1 nếu giữ nhiệt độ to = const thì:
EAB = eAB(t) + C = f(t) (3.16)
Chọn nhiệt độ ở một mối hàn to = const biết trước làm nhiệt độ so sánh và đo sức điện động sinh ra trong mạch ta có thể xác định được nhiệt độ t ở mối hàn thứ hai.
Sức điện động ở cặp nhiệt không thai đổi nếu ta nối thên vào mạch một dây dẫn thứ ba (hình 3.9). Nếu nhiệt độ hai đầu nối của dây thứ ba giống nhau.
Thật vậy:
- Trong trường hợp a:
EABC(t,to) = eAB(t) +eBC(to) + eCA(to)
Ví:
eAB(to) + eBC(to) + eCA(to) = 0
Nên:
EABC(t,to) = eAB(t) - eAB(to)
- Trường hợp b:
EABC(t,t1,to) = eAB(t) - eAB(to) + eBC(t1) + eCB(t1)
Vì:
eBC(t1) = - eCB(t1)
Nên:
EABC(t,to) = eAB(t) - eAB(to)
Nếu nhiệt độ hai dầu nối khác nhau sẽ làm xuất hiện suất điện động kí sinh.
1.4.2. Cấu tạo cập nhiệt:
- Vật liệu chế tạo:
Đẻ chế tạo cực nhiệt điện có thể dùng nhiều kim loại và hợp kim khác nhau. Tuy nhiên chung phải đảm bảo các yêu cầu sao:
+ Sức diện động đủ lớn (dể dể dàng chế tạo dụng cụ đo thứ cấp).
+ Có đủ độ bền cơ học và hóa học ở nhiệt độ làm việc.
+ Dễ kéo sợi.
+ Có khả năng thai lẫn.
+ Giá thành rẽ.
Hình (3.10) biểu diễn quan hệ giữa sức điện dộng và nhiệt độ của vật liệu dùng để chế tạo điện cực so voi điện cực chuẩn của platin.
- Cập nhiệt Platin – Rudi/Platin
Cực dương là hợp kim platin 90% và rodi 10%, cực âm là Platin sạch.
Nhiệt độ làm việc ngắn hạn cho phép tới 1600oC, Eđ = 16,77mV.
Nhiệt độ làm việc dày hạn < 1300oC.
Đường đặc tính có dạng bật hai, trong khoang nhiệt độ từ 0 ÷ 300oC, thi E≈0.
Môi trường có SiO2 có thể hỏng ở nhiệt độ 1000 ÷ 1100oC.
Dường kính điện cực thường chế tạo φ = 0.5 mm.
Do sai số của các cập nhiệt khác nhau tương đối nhỏ nên cập nhiệt nay thường được làm cập nhiệt chuẩn.
- Cập nhiệt Chromel/Alumel
Cực dương là Chrome (hợp kim gồm: 80%Ni, 10%Cr, 10%Fe), cực âm là Alumel (là hợp kim gồm: 95%Ni, 5%(Mn, Cr, Si).
Nhiệt độ làm việc ngắn hạn ~ 100oC, Eđ = 46,16 mV.
Nhiệt độ làm việc dài hạn < 900oC.
Đường kính cực φ =3 mm.
- Cập nhiệt Chromel/Coben
Cực dương là Chromel, cực am là Coben (lá hợp kim gồm: 56%Cu, 44%Ni).
Nhiệt độ làm việc ngắn hạn 800oC, Eđ = 66 mV.
Nhiệt độ làm việc dài hạn < 600oC.
- Cap nhiệt Đồng/Coben
Cực dương là đồng sạch, cực âm là coben.
Nhiệt độ làm việc ngắn hạn 600oC.
Nhiệt độ làm việc dài hạn < 300oC.
Loại này được dùng nhiều trong thí nghiệm vì dễ chế tạo.
Quan hệ giữa sức điện động và nhiệt độ của một số cập nhiệt cho ở hình 3.11
- Cấu tạo
Cấu tạo điển hình của một cập nhiệt công nghiệp như hình
Đầu làm việc của các điện cực (3) được hàn với nhau bằng hàn vảy, hàn khí hoặc hàn bằng tia điện tử. dầu tự do nối với dây (7) tới dụng cụ đo nhờ các vít nối (6) dây đặc trong đầu nối (8). Dể cách ly các diện cực người ta dùng các ống sứ cách điện (4), ống sứ trơ về hóa học và đủ dộ bền cơ và nhiệt ở nhiệt độ làm việc. Để bảo vệ các điện cực, các cặp nhiệt có vỏ bảo vệ (1) làm bằng sứ chụi nhiệt hoặc thép chụi nhiệt. Hệ thống bảo vệ phải có nhiệt dung đủ nhỏ đeể giảm bớt quán tính nhiệt và vật liệu chế tạo vỏ phải có độ dẫn nhiệt không quá nhỏ nhưng cũng không được quá lớn. Trường hợp vỏ bằng thep1moi61 hàn ở đầu làm việc có thể tiếp xúc với vỏ dể giảm thời gian hồi đáp.
1.4.3. Mạch đo và dụng cụ thứ cấp:
Nhiệt độ cần đo được xác định thông qua việc xác định sức điện động sinh ra ở hai đầu dây của cập nhiệt ngẫu. Dộ chính xác của phép đo sức điện động của cập nhiệt ngẫu phụ thuộc vào nhiều yếu tố. Muốn nâng cao độ chính xác cần phải :
- giảm thiểu ảnh hưởng của tác động của môi trường đo lên nhiệt độ đầu tự do.
- Giảm thiue63 sự sụt áp do có dòng điện chay qua các phần tử cảm biến và mạch đo.
a. Sơ đồ mạch đo dùng milivôn kê
- Sơ đồ
Khi đo hai dầu nhiệt độ (2) và (3) bằng nhau thi sức điện đống trong mạch chính là suất điện động của cập nhiệt, nếu chúng khác nhau thì trong mạch xuất hiện suất điện động kí sinh ở các mối nối làm sai lệch kết quả đo.
Dể đo trực tiếp hiệu nhiệt độ giũa hai diễm người ta dùng sơ đo vi sai như hình 3.14 .
Trong so đồ này cả hai đầu 1 và 2 của cập nhiệt la dầu làm việc tương ứng với nhiệt độ t1 và t2 . Kết quả đo cho phép xác định trược tiếp hiệu số hai hiệt độ t1 – t2.
...................................................
độ tăng gấp 2 lần. Do đó ta thu được họ các đường đặc tính cơ có độ dốc hơn và có tốc độ không tải lớn hơn. Vì vậy càng giảm từ thông thì tốc độ không tải lý tưởng của đặc tính cơ càng tăng, tốc độ động cơ càng lớn . Độ cứng đặc tính cơ giảm .
Phương pháp này rất kinh tế vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ với dòng kích từ là (1 ÷ 10)% dòng định mức phần ứng.
2.3.3 - Điều chỉnh tốc độ động cơ bằng cách thay đổi điện trở phụ:
Trong thực tế người ta thêm điện trở phụ vào mạch phần ứng động cơ :
R = Rư + Rf , và giữ điện áp U = Uđm, từ thông Ø = Ødm = const.
Ta có:
Ta được họ các đường đặc tính cơ như sau :
Hình 1.6: Họ đặc tính động cơ khi thay đổi điện trở phụ mạch phần ứng động cơ
+ Nhận xét : Khi tăng điện trở phụ trong mạch phần ứng động cơ thì độ dốc đặc tính cơ càng lớn ,đặc tính cơ mềm và độ ổn định tốc độ càng kém sai số tốc độ càng lớn. Tốc độ không tải không đổi và = ω0, còn độ sụt tốc độ Δω tăng. Khi đó ta được họ các đường đặc tính cơ nhân tạo cùng đi qua điểm tốc độ không tải (0, ω0 ) và độ rốc tăng khi điện trở Rf càng lớn, tức là độ cứng của đặc tính cơ giảm .
KẾT LUẬN : Cả 3 phương pháp trên đều điều chỉnh được tốc độ động cơ điện một chiều nhưng chỉ có phương pháp điều chỉnh tốc độ động cơ điện một chiều bằng cách thay đổi điện áp Uư đặt vào phần ứng của động cơ là tốt nhất và hay được sử dụng nhất vì nó thu được đặc tính cơ có độ cứng không đổi, điều chỉnh tốc độ bằng phẳng và không bị tổn hao .
CHƯƠNG 3: TỔNG QUAN VỀ PLC S7-300
3.1 GIỚI THIỆU PLC S7-300:
3.1.1 Thiết bị điều khiển logic lập trình:
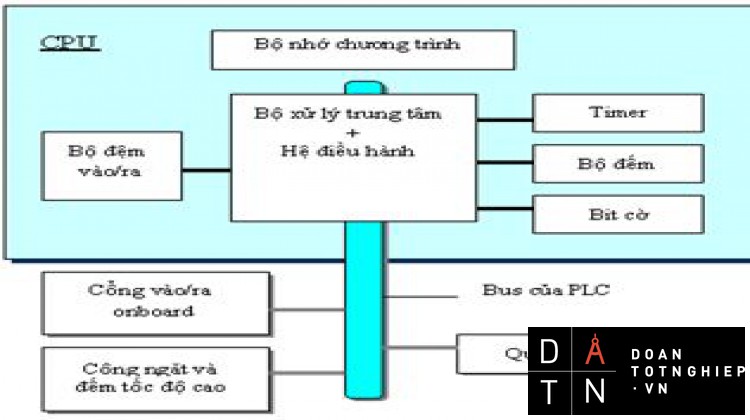
Thiết bị điều khiển logic lập trình ( Programmble Logic Controller) là loại thiết bị thực hiện linh hoạt các thuật toán điều khiển số thông qua một ngôn ngữ lập trình, thay vì phải thực hiện thuật toán đó bằng mạch số. Như vậy, PLC là một bộ điều khiển gọn,nhẹ và dễ trao đổi thông tin với môi trường bên ngoài ( với các PLC khác hoặc máy tính). Toàn bộ chương trình điều khiển được lưu trữ trong bộ nhớ của PLC dưới dạng các khối chương trình và được thực hiện theo chu kỳ của vòng quét (scan).
Hình 5.1: Cấu trúc bên trong của một PLC
Để thực hiện được một chương trình điều khiển, tất nhiên PLC phải có tính năng như một máy tính, nghĩa là phải có một bộ vi xử lý (CPU), một hệ điều hành, bộ nhớ để lưu chương trình điều khiển, dữ liệu và tất nhiên phải có các cổng vào/ra để giao tiếp được với đối tượng điều khiển và để trao đổi thông tin với môi trường xung quanh. Bên cạnh đó nhằm phục vụ bài toán điều khiển số, PLC còn phải có thêm một số khối chức năng đặc biệt khác như bộ đếm ( Counter), bộ định thời ( Timer).... và những khối hàm chuyên dùng.
Ưu điểm của bộ điều khiển lập trình so với điều khiển nối dây:
- Tính năng mở rộng: khả năng mở rộng xử lý bằng cách thay đổi chương trình lập trình một cách dễ dàng.
- Độ tin cậy cao.
- Cách kết nối thiết bị điều khiển đơn giản.
- Hình dáng PLC gọn nhẹ.
- Giá thành và chi phí lắp đặt thấp.
- Phù hợp với môi trường công nghiệp.
Các ứng dụng của PLC trong sản xuất và trong dân dụng:
- Điều khiển các robot trong công nghiệp.
- Hệ thống xử lý nước sạch.
- Công nghệ thực phẩm.
- Công nghệ chế biến dầu mỏ.
- Công nghệ sản xuất vi mạch.
- Điều khiển các máy công cụ.
- Điều khiển và giám sát dây chuyền sản xuất.
- Điều khiển hệ thống đèn giao thông.
- .....
3.1.2 Các tín hiệu kết nối PLC:
- Tín hiệu số:
Là các tín hiệu thuộc dạng hàm Boolean, dạng tín hiệu chỉ có 2 giá trị 0 và 1. Đối với PLC Siemens:
- Mức 0: tương ứng với 0V hoặc hở mạch
- Mức 1: tương ứng với 24V
Ví dụ: các tín hiệu từ nút nhấn, các công tắc hành trình.... đều là những tín hiệu số.
- Tín hiệu tương tự:
Là tín hiệu liên tục từ 0-10V hay từ 4-20mA.... Ví dụ: tín hiệu đọc từ Loadcell, cảm biến áp suất, cảm biến nhiệt, cảm biến lưu lượng....
- Tín hiệu khác:
Bao gồm các tín hiệu giao tiếp với máy tính, với các thiết bị ngoại vi khác bằng các giao thức khác nhau như giao thức RS 232, RS 485, Modbus....
3.1.3 Các module của PLC S7-300:
Để tăng tính mềm dẻo trong các ứng dụng thực tế mà ở đó phần lớn các dối tượng điều khiển có số tín hiệu đầu vào, đầu ra cũng như chủng loại tín hiệu vào/ra khác nhau mà các bộ điều khiển PLC được thiết kế không bi cứng hóa về cấu hình. Chúng được chia nhỏ thành các module. Số các module được sử dụng nhiều hay ít tùy thuộc vào từng bài toán, song tối thiểu bao giờ cũng có module chính ( module CPU, module nguồn). Các module còn lại là những module truyền nhận tín hiệu với các đối tượng điều khiển, chúng được gọi là các module mở rộng. Tất cả các moduel đều được gắn trên một thanh Rack.
Module CPU: đây là loại module có chứa bộ vi xử lý, hệ điều hành, bộ nhớ, các bộ thời gian, bộ đếm, cổng truyền thông... Và có thể có các cổng vào/ra. Các cổng vào/ra tích hợp trên CPU gọi là cổng vào ra onboard.
Trong họ PLC S7-300, các module CPU có nhiều loại và được đặt tên theo bộ vi xử lý bên trong như: CPU 312, CPU 314, CPU 315, CPU 316, CPU 318... Những module cùng một bộ vi xử lý nhưng khác nhau số cổng vào/ra onboard cũng như các khối hàm đặc biệt thì được phân biệt bằng cụm chữ cái IFM ( Intergrated Function Module). Ví dụ như CPU 312 IFM, CPU 314 IFM....
Ngoài ra, còn có các loại module CPU có hai cổng truyền thông. Trong đó cổng thứ hai dùng để nối mạng phân tán như mạng Profibus ( Process Field Bus). Loại này đi kèm với cụm từ DP ( Distributed Port) trong tên gọi. Ví dụ module CPU 315-2DP
Các module mở rộng được chia thành 5 loại:
- Module nguồn ( Power Supply):
Module nguồn là module tạo ra nguồn có điện áp 24VDC cấp nguồn cho các module khác. Có 3 loại: 3A, 5A, 10A.
- Module tín hiệu ( Signal Module):
Module ngõ vào số ( Digital Input): số các ngõ vào số mở rộng có thể là 8, 16 hoặc là 32 tùy thuộc vào từng loại module.
Module ngõ ra số ( Digital Output): số các ngõ ra số mở rộng có thể là 8, 16 hoặc là 32 tùy thuộc vào từng loại module.
Module ngõ vào/ra số ( Digital Input/Output): số các ngõ vào/ra số mở rộng có thể là 8 vào/8 ra hoặc 16 vào/16 ra tùy thuộc vào từng loại module.
Module ngõ vào tương tự ( Analog Input): bản chất chúng là những bộ chuyển đổi tương tự sang số (ADC). Số các cổng vào tương tự có thể là 2, 4 hoặc 8 tùy từng loại module, số bit có thể là 8, 10, 12, 14, 16 tùy theo từng loại module.
Module ngõ ra tương tự ( Analog Output): chúng là những bộ chuyển đổi số sang tương tự (DAC). Số các cổng ra tương tự có thể là 2 hoặc 4 tùy từng loại.
Module ngõ vào/ra tương tự ( Analog Input/Output): số các cổng vào ra tương tự có thể là 4 vào/2 ra hoặc 4 vào/4 ra tùy từng loại module.
- Module kết nối ( Interface Module):
Đây là loại module dùng để kết nối từng nhóm các module mở rộng thành một khối và được quản lý bởi một module CPU. Thông thường các module mở rộng được gắn liền nhau trên một thanh rack. Mỗi thanh rack chỉ có thể gắn được nhiều nhất 8 module mở rộng ( không kể module CPU và module nguồn). Một module CPU có thể làm việc nhiều nhất với 4 thanh rack và các rack này phải được nối với nhau bằng module IM.
- Module chức năng ( Function Module):
Module có chức năng điều khiển riêng như: module điều khiển động cơ bước, module điều khiển động cơ servo, module PID...
- Module truyền thông ( Communication Processor):
Module truyền thông giữa PLC với PLC hay giữa PLC với PC.
3.1.4 Cấu hình của một trạm PLC S7-300:
Hình 5.2: Cấu hình một trạm PLC S7-300
Cấu hình tối đa của một trạm PLC S7-300 có thể quản lý:
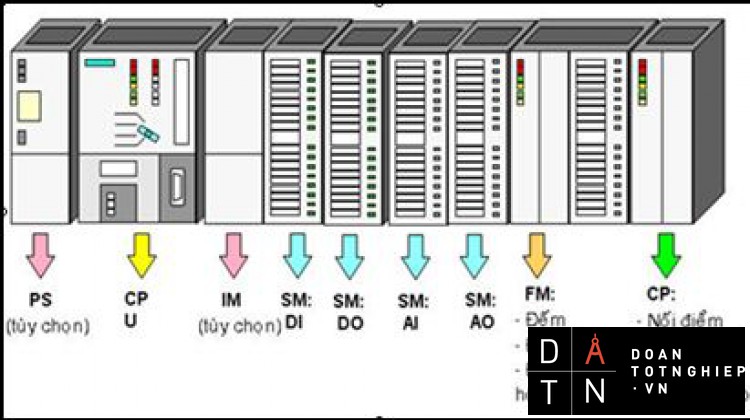
Hình 5.3: Cấu hình tối đa của một trạm PLC S7-300 trên bốn thanh rack
Những thành phần cơ bản của một trạm PLC S7-300:
|
Thành phần |
Chức năng |
Hình ảnh |
|
Rail |
Là nơi để gắn CPU và các module. |
|
|
Module nguồn ( Power Supply – PS) |
Chuyển đổi điện áp 120/230VAC sang 24VDC để cung cấp nguồn cho S7-300 và các module khác. |
|
|
CPU |
Thực hiện chương trình mà người dùng đã lập trình. Cung cấp nguồn 5V cho Backplane Bus. Kết nối các nút khác trong mạng MPI thông qua giao diện MPI. |
|
|
Module tín hiệu ( Signal Module – SM) |
Có chức năng nhận và truyền các tín hiệu với các đối tượng điều khiển. |
|
|
Module chức năng (Function Module – FM) |
Có chức năng điều khiển riêng như: điều khiển động cơ bước, động cơ servo, điều khiển bộ đém tốc độ cao, điều khiển hồi tiếp... |
|
|
Bộ xử lý truyền thông (Communication Proceesor – CP) |
Phục vụ truyền thông trong mạng giữa các PLC với nhau hoặc giữa PLC với PC |
|
|
Các điểm nối của SIMATIC |
Là nơi dùng để đấu dây cho các module Digital. |
|
|
Module kết nối ( Interface Module – IM) |
Có chức năng kết nối các module mở rộng lại với nhau và được quản lý bởi CPU. |
|
|
Cáp nối Profibus và đầu nối dây |
Dùng để liên kết các trạm trong MPI hoặc mạng Profibus |
|
|
Cáp nối thiết bị lập trình |
Có chức năng kết nối CPU với thiết bị lập trình, máy tính (PC). |
|
|
Bộ chuyển tiếp RS – 485 |
Khuếch đại những tín hiệu trong mạng MPI hoặc mạng Profibus rồi kết nối các tín hiệu. |
|
|
Thiết bị lập trình (PG), máy tính (PC) và phần mềm STEP 7 |
Lập trình chương trình điều khiển rồi truyền cho CPU |
3.1.5 Tổ chức bộ nhớ CPU:
Vùng nhớ chứa các thanh ghi: ACCU1, ACCU2, AR1, AR2....
Load Memory: là vùng nhớ chứa chương trình ứng dụng ( do người sử dụng viết) bao gồm tất cả các khối chương trình ứng dụng OB, FC, FB, các khối chương trình trong thư viện hệ thống được sử dụng ( SFC, SFB) và các khối dữ liệu DB. Vùng nhớ này được tạo bởi một phần bộ nhớ RAM của CPU và EEPROM ( nếu có EEPROM). Khi thực hiện động tác xóa bộ nhớ ( MRES) toàn bộ các khối chương trình và khối dữ liệu nằm trong RAM sẽ bị xóa. Cũng như vậy, khi chương trình hay khối dữ liệu được tải ( download) từ thiết bị lập trình ( PG, PC) vào module CPU, chúng sẽ được ghi lên phần RAM của vùng nhớ Load memory.
Work Memory: là vùng nhớ chứa các khối DB đang được mở, khối chương trình ( OB, FC, FB, SFC hoặc SFB) đang được CPU thực hiện và phần bộ nhớ cấp phát cho những tham số hình thức để các khối chương trình này trao đổi tham trị với hệ điều hành và với các khối chương trình khác ( local block). Tại một thời điểm nhất định vùng nhớ Work memory chỉ chứa một khối chương trình. Sau khi khối chương trình đó được thực hiện xong thì hệ điều hành sẽ xóa khỏi Work memory và nạp vào đó khối chương trình kế tiếp đến lượt được thực hiện.
System Memory: là vùng nhớ chứa các bộ đệm vào/ra số (I/Q), các biến cờ (M), thanh ghi C-Word, PV, T-bit của timer, thanh ghi C-Word, PV, C-bit của Counter. Việc truy cập sửa lỗi dữ liệu những ô nhớ này được phân chia bởi hệ điều hành của CPU hoặc do chương trình ứng dụng.
Có thể thấy rằng trong các vùng nhớ được trình bày ở trên không có vùng nhớ nào được dùng làm bộ đệm cho các cổng vào/ra tương tự. Nói cách khác, các cổng vào ra tương tự không có bộ đệm và như vậy mỗi lệnh truy nhập module tương tự ( đọc hoặc gửi giá trị) đều có tác dụng trực tiếp tới các cổng vật lý của module.
|
Tên gọi |
Kích thước truy nhập |
Kích thước tối đa ( tùy thuộc vào CPU) |
|
Process Input Image (I) Bộ đệm vào số |
I IB IW ID |
0.0-127.7 0-127 0-126 0-124 |
|
Process Output Image (Q) Bộ đệm ra số |
Q QB QW QD |
0.0-127.7 0-127 0-126 0-124 |
|
Bit Memory (M) Vùng nhớ cờ |
M MB MW MD |
0.0-255.7 0-255 0-254 0-252 |
|
Timer (T) |
T0-T255 |
|
|
Counter (C) |
C0-C255 |
|
|
Data Block (DB) Khối dữ liệu share |
DBX DBB DBW DBD |
0.0-65535.7 0-65535 0-65534 0-65532 |
|
Data Block (DI) |
DIX |
0.0-65535.7 |
|
Khối dữ liệu Instance |
DIB DIW DID |
0-65535 0-65534 0-65532 |
|
Local Block (L) Miền nhớ địa phương cho các tham số hình thức |
L LB LW LD |
0.0-65535.7 0-65535 0-65534 0-65532 |
|
Peripheral Input (PI) |
PIB PIW PID |
0-65535 0-65534 0-65532 |
|
Peripheral Output (PQ) |
PQB PQW PQD |
0-65535 0-65534 0-65532 |
Bảng 5.1: Vùng địa chỉ và tầm địa chỉ
Trừ phần bộ nhớ EEPROM thuộc vùng nhớ Load memory và một phần RAM tự nuôi đặc biệt ( non-valatile) dùng để lưu giữ tham số cấu hình trạm PLC như địa chỉ trạm ( MPI address), tên các module mở rộng, tất cả các phần bộ nhớ còn lại ở chế độ mặc định không có khả năng tự nhớ ( non-retentive). Khi mất nguồn nuôi hoặc khi thực hiện công việc xóa bộ nhớ ( MRES), toàn bộ nội dung của phần bộ nhớ non-retentive sẽ bị mất.
3.1.6 Vòng quét chương trình của PLC:
PLC thực hiện chương trình theo chu trình lặp. Mỗi vòng lặp được gọi là vòng quét (scan). Mỗi vòng quét được bắt đầu bằng giai đoạn chuyển dữ liệu từ các cổng vào số tới vùng bộ đệm ảo I, tiếp theo là giai đoạn thực hiện chương trình. Trong từng vòng quét, chương trình được thực hiện từ lệnh đầu tiên đến lệnh kết thúc của khối OB1 ( Block end). Sau giai đoạn thực hiện chương trình là giai đoạn chuyển các nội dung của bộ đệm ảo Q tới các cổng ra số. Vòng quét được kết thúc bằng giai đoạn truyền thông nội bộ và kiểm tra lỗi.
Thời gian cần thiết để PLC thực hiện được một vòng quét gọi là thời gian vòng quét ( Scan time). Thời gian vòng quét không cố định, tức là không phải vòng quét nào cũng được thực hiện lâu, có vòng quét được thực hiện nhanh tùy thuộc vào số lệnh trong chương trình được thực hiện, vào khối dữ liệu được truyền thông.... trong vòng quét đó.
Hình 4.4: Vòng quét của CPU
Như vậy giữa việc đọc dữ liệu từ đối tượng để xử lý, tính toán và việc gửi tín hiệu điều khiển tới đối tượng có một khoảng thời gian trễ đúng bằng thời gian vòng quét. Nói cách khác, thời gian vòng quét quyết định tính thời gian thực của chượng trình điều khiển trong PLC. Thời gian vòng quét càng ngắn, tính thời gian thực của chương trình càng cao.
Nếu sử dụng các khối chương trình đặc biệt có chế độ ngắt, ví dụ như khối OB40, OB80,... Chương trình của các khối sẽ được thực hiện trong vòng quét khi xuất hiện tín hiệu báo ngắt cùng chủng loại. Các khối chương trình này có thể được thực hiện tại mọi điểm trong vòng quét chứ không bị gò ép là phải ở trong gia đoạn thực hiện chương trình. Chẳng hạn nếu một tín hiệu báo ngắt xuất hiện khi PLC đang ở giai đoạn truyền thông và kiểm tra nội bộ, PLC sẽ tạm dừng công việc truyền thông, kiểm tra, để thực hiện khối chương trình tương ứng với khối tín hiệu báo ngắt đó. Với hình thức xử lý tín hiệu ngắt như vậy, thời gian vòng quét sẽ càng lớn khi càng có nhiều tính hiệu ngắt xuất hiện trong vòng quét. Do đó, để nâng cao tính thời gian thực cho chương trình điều khiển tuyệt đối không nên viết chương trình xử lý ngắt quá dài hoặc quá lạm dụng việc sử dụng chế độ ngắt trong chương trình điều khiển.
Tại thời điểm thực hiện lệnh vào/ra, thông thường lệnh không làm việc trực tiếp với cổng vào/ra mà chỉ thông qua bộ đệm ảo của cổng trong vùng nhớ tham số. Việc truyền thông giữa bộ đệm ảo với ngoại vi trong các giai đoạn 1 và 3 do hệ điều hành CPU quản lý. Ở một số module CPU, khi gặp lệnh vào/ra ngay lập tức, hệ thống sẽ cho dừng mọi công việc khác, ngay cả chương trình xử lý ngắt, để thực hiện lệnh trực tiếp với cổng vào/ra.
3.1.7 Bộ nhớ PLC:
- Vùng chứa chương trình ứng dụng: được chia thành 3 miền.
- OB ( Organisation Block): miền chứa chươ trình tổ chức.
- FC ( Function): miền chứa chương trình con, được tổ chức thành hàm và có biến hình thức để trao đổi dữ liệu.
-
FB ( Function Block): miền chứa chương trình con, được tổ chức thành hàm và có khả năng trao đổi dữ liệu với bất cứ một khối chương trình nào khác. Các dữ liệu này phải được xây dựng thành một khối dữ liệu riêng ( Data Block khối DB).
- Vùng chứa tham số của hệ điều hành: chia thành 7 miền khác nhau.
- I ( Process Image Input): miền dữ liệu các cổng vào số, trước khi bắt đầu thực hiện chương trình, PLC sẽ đọc giá trị logic của tất cả các cổng đầu vào và cất giữ chúng trong vùng nhớ I. Thông thường chương trình ứng dụng không đọc trực tiếp trạng thái logic của cổng vào số mà chỉ lấy dữ liệu của cổng vào từ bộ đệm I.
- Q ( Process Image Output): miền bộ đệm các dữ liệu cổng ra số. Kết thúc giai đoạn thực hiện chương trình, PLC sẽ chuyển giá trị logic của bộ đệm Q tới các cổng ra số. Thông thường chương trình không trực tiếp gán giá trị tới tận cổng ra mà chỉ chuyển chúng tới bộ đệm Q.
- M ( Miền các biến cờ): chương trình ứng dụng sử dụng các biến này để lưu giữ các tham số cần thiết và có thể truy nhập nó theo bit (M), byte (MB), từ (MW) hay từ kép (MD).
- T ( Timer): miền nhớ phục vụ bộ thời gian ( Timer) bao gồm việc lưu trữ giá trị thời gian đặt trước ( PV-Preset Value), giá trị đếm thời gian tức thời ( CV-Current Value) cũng như giá trị logic đầu ra của bộ thời gian.
- C ( Counter): miền nhớ phục vụ bộ đếm bao gồm việc lưu trữ giá trị đặt trước (PV-Preset Value), giá trị đếm thời gian tức thời ( CV-Current Value) và giá trị logic đầu ra của bộ đệm.
- PI: miền địa chỉ cổng vào của các module tương tự ( I/O External Input). Các giá trị tương tự tại cổng vào của module tương tự sẽ được module đọc và chuyển tự động theo những địa chỉ. Chương trình ứng dụng này có thể truy cập miền nhớ PI theo từng Byte (PIB), từng từ (PIW) hoặc từng từ kép (PID).
-
PQ: miền địa chỉ cổng ra cho các module tương tự ( I/O External Output). Các gái trị theo những địa chỉ này sẽ được module tương tự chuyển tới các cổng ra tương tự. Chương trình ứng dụng có thể truy nhập miền nhớ PQ theo từng Byte (PQB), từng từ (PQW) hoặc theo từng từ kép (PQD).
- Vùng chứa các khối dữ liệu: được chia làm 2 loại.
- DB ( Data Block): miền chứa dữ liệu được tổ chức thành khối. Kích thước cũng như số lượng khối do người sử dụng quy định, phù hợp với từng bài toán điều khiển. Chương trình có thể truy nhập miền này theo từng bit (DBX), byte (DBB), từ (DBW) hoặc từ kép (DBD).
- L ( Local Data Block): miền dữ liệu địa phương, được các khối chương trình OB, FC, FB tổ chức và sử dụng cho các biến nháp tức thời và trao đổi dữ liệu của biến hình thức với những khối chương trình gọi nó. Nội dung của một khối dữ liệu trong miền nhớ này sẽ bị xóa khi kết thúc chương trình tương ứng trong OB, FC, FB. Miền này có thể truy nhập từ chương trình theo bit (L), byte (LB), từ (LW) hoặc từ kép (LD).
3.1.8 Các kiểu dữ liệu của PLC S7-300:
Một chương trình ứng dụng trong S7-300 có thể sử dụng các kiểu dữ liệu sau:
BOOL: với dung lượng 1 bit và có giá trị 0 hoặc 1 ( đúng hoặc sai).
BYTE: gồm 8 bit, thường được dùng để biểu diễn cho một số nguyên dương trong khoảng từ 0 đến 225 hoặc mã ASCIIc của một kí tự.
WORD: gồm 2 byte để biểu diễn cho một số nguyên dương từ 0 đến 65535.
INT: gồm 2 byte, dùng để biểu diễn một số nguyên từ -32768 đến 32767.
DINT: gồm 4 byte, dùng để biểu diễn một số nguyên từ -2147483648 đến 2147483647.
REAL: gồm 4 byte dùng để biểu diễn một số thức dấu phẩy động.
S5T ( hay S5TIME): khoảng thời gian được tính theo giờ/phút/giây/mili giây.
TOD: biểu diễn giá trị thời gian tính theo giờ/phút/giây.
DATE: biểu diễn giá trị thời gian tính theo năm/tháng/ngày.
CHAR: biểu diễn một hay nhiều kí tự ( nhiều nhất là 4 kí tự).
3.1.9 Ngôn ngữ lập trình của PLC:
Các loại PLC thường có nhiều ngôn ngữ lập trình nhằm phục vụ các đối tượng sử dụng khác nhau. PLC S7-300 có 3 ngôn ngữ lập trình như sau:
Liệt kê lệnh ( STL – Statement List): đây là dạng ngôn ngữ thông thường của máy. Một chương trình được ghép bởi nhiều câu lệnh theo một thuật toán nhất định, mỗi lệnh chiếm một hàng và đều có cấu trúc chung là: tên lệnh + thuật toán.
Dạng thang ( LAD – Ladder Logic): đây là dạng ngô ngỡ đồ họa thích hợp với đối tượng quen thiết kế mạch điều khiển logic.
Dạng hình khối ( FBD – Function Block Diagram): đây là dạng ngô ngỡ đồ họa thích hợp với đối tượng quen thiết kế mạch điều khiển số.
Một chương trình viết trên LAD hoặc FBD có thể chuyển sang được dạng STL nhưng ngược lại thì không. Trong STL có nhiều lệnh nhưng LAD và FBD không có. Như vậy STL là ngôn ngữ mạnh nhất trong ba loại ngô ngữ lập trình cho S7-300.
Do mới làm quen với PLC S7-300 nên nhóm thực hiện đồ án chọn ngôn ngữ LAD làm ngôn ngữ chính để nghiên cứu và thực hiện viết chương trình điều khiển cho hệ thống, thiết bị.
3.1.10 Những khối OB đặc biệt:
Trong khi khối OB1 thực hiện đều đặn từng vòng quét trong giai đoạn thực hiện chương trình ( giai đoạn 2) thì các khối OB khác chỉ thực hiện khi có tín hiệu báo ngắt tương ứng, chúng bao gồm các khối sau:
- OB10 ( Time of Date Interrupt): chương trình trong khối OB10 sẽ được thực hiện khi giá trị của đồng hồ thời gian thực nằm trong một khoảng thời gian đã quy định. OB10 có thể gọi một lần hay nhiều lần cách đều nhau từng phút, từng giờ, từng ngày...
- OB20 ( Time Delay Interrupt): chương trình trong khối OB20 sẽ được thực hiện sau một khoảng thời gian trễ đặt trước kể từ khi gọi chương trình hệ thống SFC32 để đặt thời gian trễ.
- OB35 ( Cyclic Interrupt): chương trình trong khối OB20 sẽ được thực hiện cách đều nhau một khoảng thời gian nhất định. Mặc định thời gian này là 100ms, song ta có thể thay đổi nó trong bảng tham số của CPU nhờ phần mềm STEP7.
- OB40 ( Hardware Interrupt): chương trình trong khối OB20 sẽ được thực hiện khi có tín hiệu ngắt từ ngoại vi đưa vào CPU thông qua cổng vào số onboard đặc biệt, hoặc thông qua module SM, CP, FM.
- OB80 ( Cycle Time Dault): được thực hiện khi vòng quét vượt quá thời gian cực đại đã quy định ( mặc định là 100ms) hoặc có tín hiệu ngắt gọi OB nào đó mà OB này chưa kết thúc ở lượt gọi trước.
- OB81 ( Power Supply Fault): khi có lỗi về nguồn nuôi thì CPU sẽ gọi OB81.
- OB82 ( Diagnostic Interrupt): được gọi khi có phát hiện có sự cố từ các module vào/ra mở rộng. Các module mở rộng này phải có khả năng tự kiểm tra mình.
- OB85 ( Not Load Fault): được gọi khi chương trình có chế độ ngắt nhưng chương trình ngắt lại không có trong OB tương ứng.
- OB87 ( Communication Fault): được gọi khi CPU thấy có lỗi truyền thông.
- OB100 ( Star Up Information): được thực hiện một lần khi CPU chuyển trạng thái từ STOP sang RUN.
- OB121 ( Synchronous Error): được thực hiện khi CPU thấy lỗi logic trong chương trình như sai kiểu dữ liệu hoặc lỗi truy nhập khối DB, FC, FB không có trong CPU.
- OB122 ( Synchronous Error): được thực hiện khi CPU phát hiện có lỗi truy nhập module trong chương trình, ví dụ chương trình có lệnh truy nhập module vào/ra nhưng lại không tìm thấy module này.
3.2 NGÔN NGỮ LẬP TRÌNH CƠ BẢN – LAD:
3.2.1 Các lệnh về bit:
Tiếp điểm thường hở I, Q, M, L, D, T, C
Tiếp điểm thường đóng I, Q, M, L, D, T, C
Lệnh NOT
Ngõ ra ( cuộn coil) I, Q, M, L, D
Lệnh Reset bit I, Q, M, L, D, T, C
Lệnh Set bit I, Q, M, L , D
Xác định kết quả tại vị trí được chèn I, Q, M, *L, D
Lệnh Save: lưu giá trị RLO vào bit cờ B
Lệnh RS ( Reset – Set Flip Flop) I, Q, M, L ,D
|
I0.0 |
I0.1 |
M0.0 |
Q0.0 |
|
0 |
0 |
0 |
0 |
|
1 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
Bảng 4.2: Lệnh RS
Lệnh SR ( Set – Reset Flip Flop) I, Q, M, L ,D
|
I0.0 |
I0.1 |
M0.0 |
Q0.0 |
|
0 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
|
1 |
1 |
0 |
0 |
Bảng 4.3: Lệnh SR
3.2.2 Các lệnh về Timer và Counter :
Lệnh S_PULSE: khi I0.0 chuyển trạng thái từ 0 lên 1 thì Timer được kích chạy ¦ Q0.0 = 1. Khi I0.0 = 0 hoặc Timer chạy đủ thời gian đặt 2s thì Timer dừng hoặc khi I0.1 = 1 thì Timer cũng dừng ¦ Q0.0 = 0.
MW100 lưu giá trị đếm của Timer theo dạng Integer. MW102 lưu gía trị đếm của Timer theo dạng BCD. Chức năng của Timer này là tạo xung có thời gian được đặt sẵn.
Lệnh S_PEXT: Timer có kích thước lớn, khi có tín hiệu cạnh lên ở I0.0 thì Timer T5 chạy ¦ Q0.0 = 1. Nếu đủ thời gian đặt hoặc khi có tín hiệu I0.1 lên 1 thì Timer dừng ¦ Q0.0 = 0. Trong quá trình Timer chạy nếu có tín hiệu mới từ chân I0.0 thì thời gian Timer lại được tính lại từ đầu. Cá ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Lệnh S_ODTS: Timer kích có nhớ, khi có xung cạnh lên ở I0.0 thì Timer bắt đầu chạy ¦ Q0.0 = 1. Khi Timer ngưng và chỉ tắt khi có tín hiệu Reset ( I0.1). Trong quá trình chạy nếu có sự chuyển đổi tín hiệu từ chân I0.0 thêm 1 lần nữa thì Timer sẽ nhớ và tiếp tục chạy khi hết thời gian lần trước. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Khi I0.0 ON, Timer T5 sẽ được kích hoạt. Đủ thời gian cài đặt là 2S thì bit T5 tác động làm cho QA. 0 ON khi ngõ vào I0.1 tác động thì Timer được Reset. Giá trị hiện tại của Timer cũng như bit T5 sẽ được Reset về 0.
Lệnh S_CUD ( Up-Down Counter): ngõ vào I0.2 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 0 lên 1, C0 đếm tăng lên 1. Khi I0.1 chuyển trạng thái từ 0 đến 1, C0 đếm giảm xuống 1. Khi cả hai I0.0 và I0.1 đều chuyển trạng thái thì C0 không thay đổi. khi I0.3 = 1 thì C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & theo dạng BCD.
Lệnh S_CU ( Up Counter): ngõ vào I0.1 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 0 lên 1, C0 đếm tăng lên 1. Khi I0.2 = 1 thi C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Lệnh S_CD ( Down Counter): ngõ vào I0.1 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 1 xuống 0, C0 giảm đi 1. Khi I0.2 = 1 thì C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
ĐỒ ÁN TỐT NGHIỆP ĐIỆN THIẾT KẾ VÀ THI CÔNG THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM, thuyết minh THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM, ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÔ HÌNH SẤY SẢN PHẨM











