đồ án TÍNH TOÁN THIẾT KẾ ROBOT 6 BẬC TỰ DO ỨNG DỤNG TRONG VIỆC TỰ ĐỘNG HÓA SẢN XUẤT Ô TÔ THỜI 4.0

NỘI DUNG ĐỒ ÁN
TRƯỜNG ĐẠI HỌC CÔNG NGHỆ GTVT
************************
NHIỆM VỤ ĐỒ ÁN TỐT NGHIỆP
1.Thông tin sinh viên thực hiện đồ án
2.Đề tài đồ án
“TÍNH TOÁN THIẾT KẾ ROBOT 6 BẬC TỰ DO ỨNG DỤNG TRONG VIỆC TỰ ĐỘNG HÓA SẢN XUẤT Ô TÔ THỜI 4.0”
3.Nội dung yêu cầu
- Xây dựng mô hình thực nghiệm robot 6 bậc tự do.
- Thiết kế bộ điều khiển.
- Viết chương trình điều khiển.
4.Nội dung thuyết minh
- Tổng quan về robot công nghiệp.
- Tính toán thiết kế robot.
- Thiết kế robot.
5.Các bản vẽ kỹ thuật
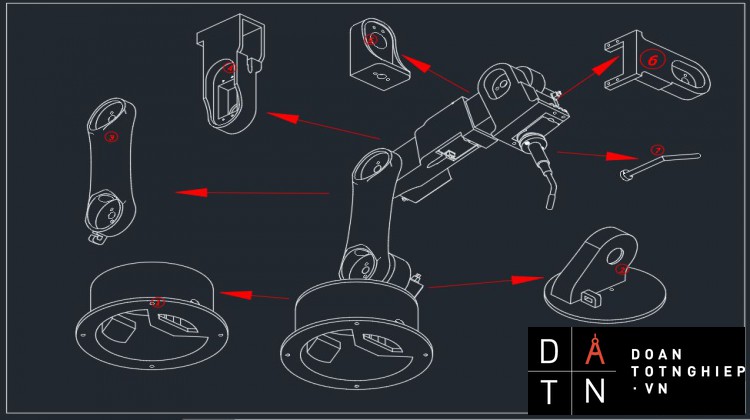
- Bản vẽ lắp ghép.
MỤC LỤC
LỜI MỞ ĐẦU.. 4
CHƯƠNG 1 : TỔNG QUAN VÀ ỨNG DỤNG ROBOT TRONG CÔNG NGHIỆP Ô TÔ.. 5
1.1 Khái niệm và phân loại5
1.1.1 Khái niệm.. 5
1.1.2 Phân loại Robot6
1.2 Cấu trúc chung của Robot công nghiệp. 8
1.3 Xu hướng phát triển. 9
1.4 Ứng dụng của Robot công nghiệp vào việc sản xuất ô tô hiện nay. 9
1.4.1 Ứng dụng trong sản xuất ô tô. 12
1.4.2 Nhà máy Vinfast và hành trình vươn tầm thế giới24
1.5 Mục tiêu và phương pháp thiết kế. 26
1.5.1 Mục tiêu đề tài26
1.5.2 Phương pháp thiết kế. 27
1.5.3 Nội dung. 27
CHƯƠNG 2: TÍNH TOÁN THIẾT KẾ ROBOT.. 28
2.1 Cơ sở lý thuyết và thiết kế. 28
2.1.1Cơ sở lý thuyết28
2.1.2 Thiết kế. 38
2.2 Phân tích lựa chọn thiết kế. 39
2.3 Thiết kế mô hình trên Solidworks. 41
2.3.1 Giới thiệu phần mềm Solidworks. 41
2.3.2 Thiết kế Robot42
CHƯƠNG 3: THIẾT KẾ MÔ HÌNH.. 44
3.1 Thiết kế các chi tiết bộ phận của Robot44
3.2 Thiết kế bộ điều khiển. 45
3.2.1 Mạch Arduino. 45
3.2.2 Mạch Điều khiển robot45
3.3.3 Giao diện sử dụng QT. 46
3.3 Thiết kế chương trình điều khiển. 48
3.3.1Điều khiển Robot48
3.2.2Code chương trình. 50
3.4 Một số kết quả mô hình (ảnh thực tế)68
KẾT LUẬN.. 70
TÀI LIỆU THAM KHẢO.. 71
DANH MỤC HÌNH ẢNH
Hình 1.1 Các loại tự động hóa công nghiệp 5
Hình 1.2 Các thế hệ Robot 7
Hình 1.3 Robot bốc dỡ hàng hóa 8
Hình 1.4 Robot hàn thân, vỏ ô tô 12
Hình 1.5 Robot lắp giáp 13
Hình 1.6 Phôi cuộn kim loại 13
Hình 1.7 Robot làm việc môi trường độc hại 14
Hình 1.8 Các cuộn tôn bằng nhôm được nhập khẩu 14
Hình 1.9 Máy nâng hạ cuộn tôn 15
Hình 1.10 Máy uốn dập tôn 15
Hình 1.11 Máy cắt tôn 16
Hình 1.12 ROBOT đưa các tấm kim loại vào máy dập 16
Hình 1.13 Sản phẩm được dập ra với hình dạng đặc thù 17
Hình 1.14Khung sườn ô tô 17
Hình 1.15ROBOT kẹp các khung và lắp ghép lại với nhau 18
Hình 1.16 Khung ô tô được lắp ghép và hàn lại với nhau bằng robot 18
Hình 1.17 Ghép khung hoàn thiện 19
Hình 1.18 Robot đưa khung vỏ vào sơn 19
Hình 1.19 Sơn tĩnh điện 20
Hình 1.20 Sơn phủ các lớp với nhau 20
Hình 1.21 Sơn bóng và hoàn thiện 21
Hình 1.22 Lắp ráp 21
Hình 1.23 Lắp ráp ô tô 22
Hình 1.24 Xe sau khi được lắp ráp xong sẽ được cho đi test các tính năng 22
Hình 1.25 Kiểm tra khả năng chống nước 23
Hình 1.26 Kiểm tra lốp và tốc độ bánh xe 23
Hình 1.27Các thông số cơ bản khi kiểm tra xe 24
Hình 1.28 Test thử xe 24
Hình 1.29 Cổng chào nhà máy Vinfast 25
Hình 1.30 Chủ tịch Phạm Nhật Vượng phát biểu thành lập công ty 25
Hình 1.31Hai mẫu xe Lux A và Lux SA 25
Hình 1.32 Nhà máy sản xuất 80% là robot tự động 26
Hình 1.33 Độ an toàn xe đạt mức 5 sao theo TCQT 26
Hình 2.1 Sơ đồ trình tự thiết kế 28
Hình 2.2 Chiều dài và góc xoắn của một khâu 29
Hình 2.3 Các thông số của khâu: θ, d, a và α. 29
Hình 2.4 Hệ trục tọa độ của robot trong mô hình hình học 30
Hình 2.5 Đồ thị quỹ đạo chuyển động 35
Hình 2.6 Đồ thị vận tốc, gia tốc điểm tác động cuối E 36
Hình 2.7 Vị trí robot 37
Hình 2.8 Robot Stanford cấu hình RRTRRR 39
Hình 2.9 Robot KUKA cấu hình RRRRRR 39
Hình 2.10 Robot Elbow cấu hình RRRRRR 39
Hình 2.11 Thông số kỹ thuật nhựa ABS 40
Hình 2.12 Động cơ servo 40
Hình 2.13 Giao diện thiết kế 41
Hình 2.14 Khâu 1 42
Hình 2.15 Bước 1 42
Hình 2.16 Bước 2 42
Hình 2.17 Bước 3 42
Hình 2.18 Bước 4 42
Hình 2.19 Robot hàn 43
Hình 2.20 Robot gắp 43
Hình 3.1Máy in 3d đang in sản phẩm 44
Hình 3.2Kết thúc quá trình in 44
Hình 3.3Bảng thông số in 45
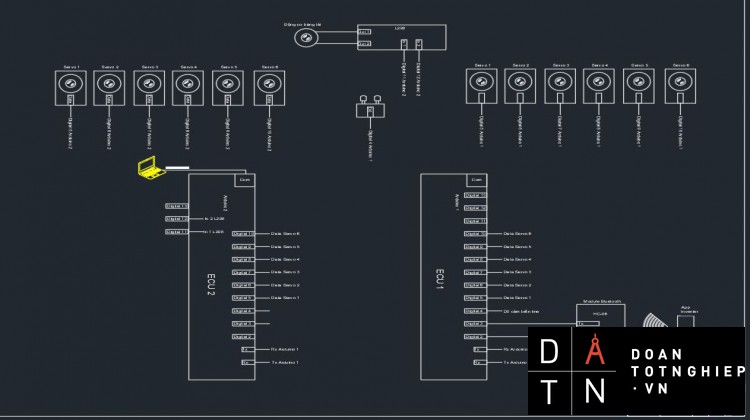
Hình 3.4 Sơ đồ khái quát về hệ thống sử dụng động cơ bước 45
Hình 3.5 Sơ đồ mạch điều khiển 49
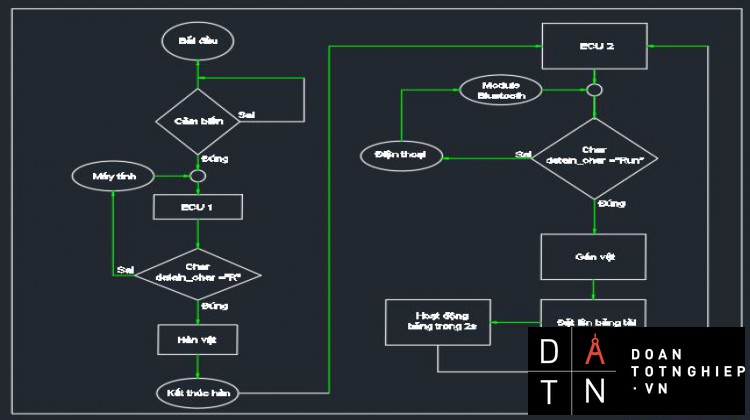
Hình 3.6 Lưu đồ thuật toán quá trình Robot 49
Hình 3.7 Ảnh thực tế robot 68
Hình 3.8 Line robot mô hình sản xuất thực tế 69
LỜI MỞ ĐẦU
Cuộc cách mạng khoa học công nghệ 4.0 đã, đang và sẽ diễn ra một cách mạnh mẽ trên toàn thế giới và đạt được những thành tựu vô cùng to lớn. Đó là những tiền đề cơ sở và là điều kiện quan trọng cho các ngành công nghiệp có động lực để phát triển, phục vụ đắc lực cho cuộc sống con người. Trong đó, công nghệ sản xuất ô tô một cách tự động bởi máy móc, robot thay thế dần sản xuất thủ công không phụ thuộc nhiều vào con người ngày càng có ý nghĩa sâu sắc, thực chất đối với công cuộc hiện đại hóa, cộng nghệ hóa đất nước đưa nền công nghiệp ô tô nước nhà nói riêng và trên thế giới nói chung ngày càng phát triển mạnh.
Do vậy việc tính toán thiết kế các mô hình robot giúp hiểu rõ hơn về cấu tạo cũng như cách làm việc của nó. Để hiểu được điều đó dưới đây bọn em sẽ trình bày tổng quan và ứng dụng của robot vào việc sản suất ô tô tự động hiện nay không những trên thế giới mà Việt Nam chúng ta cũng đang phát triển mạnh việc tự động hóa sản xuất ô tô, đưa nền công nghiệp ô tô Việt Nam sánh vai với các cường quốc công nghiệp. Sau đó đưa ra tính toán thiết kế, lựa chọn thiết kế và thiết kế robot trên phần mềm Solidworks. Rồi kết hợp thiết kế bộ điều khiển và mạch điều khiển 2 robot Hàn, Gắp tạo ra một line nhỏ trong quá trình sản xuất tự động hóa ô tô hiện nay.
Trong quá trình làm còn một số hạn chế và thiếu sót bởi trình độ và đã được các thầy cô giáo trong bộ môn giúp đỡ đặc biệt là thầy giáo hướng dẫn Qua đó chúng em rất mong được sự góp ý và chỉ bảo của các thầy cô để bài báo cáo của chúng em được hoàn thiện hơn. Em xin chân thành cảm ơn.
CHƯƠNG 1 : TỔNG QUAN VÀ ỨNG DỤNG ROBOT TRONG CÔNG NGHIỆP Ô TÔ
1.1 Khái niệm và phân loại
1.1.1 Khái niệm
Robot công nghiệp là tay máy vạn năng, hoạt động theo chương trình và có thể lập trình lại để hoàn thành và nâng cao hiệu quả hoàn thành các nhiệm vụ khác nhau trong công nghiệp, như vận chuyển nguyên vật liệu, chi tiết, dụng cụ hoặc các thiết bị chuyên dùng khác.
Kỹ thuật tự động hóa trong công nghiệp đã đạt tới trình độ rất cao: không chỉ tự động hóa các quá trình vật lý mà cả quá trình xử lý thông tin. Vì vậy, tự động hóa trong công nghiệp tích hợp công nghệ sản xuất, kỹ thuật điện, điện tử, kỹ thuật điều khiển tự động trong đó có tự động hóa nhờ máy tính.
Hình 1.1 Các loại tự động hóa công nghiệp
Robot công nghiệp có 2 đặc trưng cơ bản:
- Là thiết bị vạn năng, được tự động hóa theo chương trình và có thể lập trình lại để đáp ứng một cách linh hoạt, khéo léo các nhiệm vụ khác nhau.
- Được ứng dụng trong những trường hợp mang tính công nghiệp đặc trưng như vận chuyển và xếp dỡ nguyên vật liệu, lắp ráp, đo lường,…
Do thể hiện 2 đặc trưng cơ bản trên của Robot công nghiệp, hiện nay định nghĩa sau đây về Robot công nghiệp do viện nghiên cứu Robot của Mỹ đề xuất được sử dụng rộng rãi.
Hiện nay nhu cầu sử dụng Robot trong công nghiệp ngày càng tăng , các loại Robot được chế tạo ngày càng đa dạng , độ chính xác cao hơn, linh hoạt hơn, giá cả phù hợp hơn, năng suất và tuổi thọ cao hơn. Mặc dù dải ứng dụng của Robot ngày càng mở rộng, nhưng theo thống kê vào năm 2000 tại Mỹ , lượng Robot hàn và xử lý phôi chiếm khoảng 78% tổng số lượng Robot công nghiệp sử dụng tại thời điểm đó. Số lượng Robot lắp ráp chiếm khoảng 10% , phần còn lại là của các loại Robot công nghiệp khác.
1.1.2 Phân loại Robot
Trong công nghiệp người ta sử dụng những đặc điểm khác nhau cơ bản nhất của Robot để giúp cho việc nhận biết được dễ dàng. Có bốn yếu tố chính để phân loại Robot như sau :
a. Phân loại theo dạng hình học của không gian hoạt động
|
Robot tọa độ góc (cartesian Robot) |
Robot tọa độ trụ (cylindrical Robot) |
Robot toa độ cầu (spherical Robot) |
Robot khớp bản lề (articular Robot) |
|
|
|||
|
Sử dụng 3 đường trượt vuông góc nhau trong không gian 3 trục tọa độ x, y, z. Robot sử dụng các khớp tịnh tiến chuyển động theo 3 trục tọa độ, phạm vi làm việc của Robot mở rộng theo hình chữ nhật.
|
Trục cơ bản là trục dọc, Robot di chuyển lên và xuống dọc theo trục, quay quanh trục. Phạm vi làm việc của Robot được mở rộng theo 1 hình trụ quanh trục cơ bản.
|
Sử dụng các khớp lồng vào nhau, giúp Robot có khả năng chuyển động lên hoặc xuống theo chiều ngang trục quay. Dạng đa khớp nối cho phép Robot mở rộng không gian làm việc theo hình cầu.
|
Đó là một kiểu tay máy có cấu tạo đặc biệt gồm 2 khớp quay và 1 khớp trượt, nhưng cả 3 khớp đều có trục song song với nhau.
|
|
Do sự đơn giản về kết cấu, tay máy kiểu này có độ cứng vững cao, độ chính xác được đảm bảo đồng đều trong toàn bộ vùng làm việc nhưng ít khéo léo. Vì vậy,tay máy kiểu tọa độ góc được dùng để vận chuyển lắp ráp.
|
Độ cứng vững cơ học của tay máy trụ tốt thích hợp với tải nặng, nhưng độ chính xác định vị góc trong mặt phẳng nằm ngang giảm khi tầm với tăng.
|
Độ cứng vững của tay máy này thấp hơn 2 loại trên và độ chính xác định vị phụ thuộc vào tầm với. Tuy nhiên loại này có thể nhặt được vật dưới nền.
|
Kết cấu này làm tay máy cứng vững hơn theo phương đứng nhưng kém cứng vững theo phương ngang. Loại này chuyên dùng cho công việc lắp ráp với tải trọng nhỏ theo phương đứng.
|
Bảng 1.1 Các dạng Robot theo hình học không gian
b. Phân loại theo thế hệ
Theo quá trình phát triển của Robot, ta có thể chia ra theo các thế hệ sau đây:
Hình 1.2 Các thế hệ Robot
c. Phân loại theo hệ thống truyền động
- Robot truyền động điều khiển bằng điện.
- Robot truyền động điều khiển bằng khí nén.
- Robot truyền động điều khiển bằng thủy lực.
- Robot truyền động điều khiển hỗn hợp.
1.2 Cấu trúc chung của Robot công nghiệp
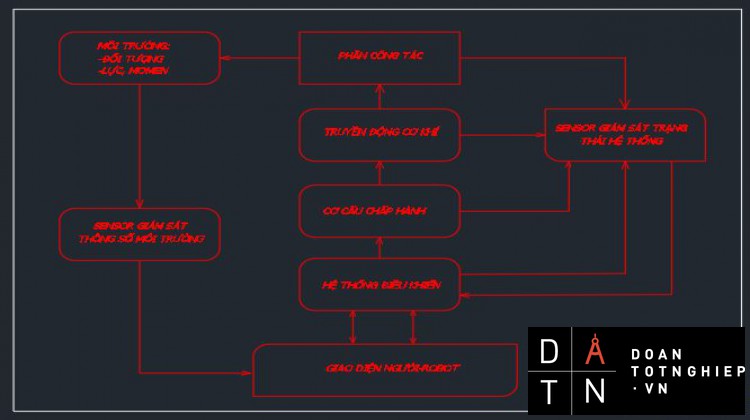
Mọi RBCN được cấu thành bởi các hệ thống chính sau:
- Tay máy (manipulator) là cơ cấu cơ khí gồm các khâu, khớp. Chúng hình thành cánh tay để tạo các chuyển động cơ bản, cổ tay tạo nên sự khéo léo, linh hoạt và bàn tay (end effector) để trực tiếp hoàn thành các thao tác trên đối tượng.
- Cơ cấu chấp hành tạo chuyển động cho các khâu của tay máy. Nguồn động lực của các cơ cấu chấp hành là động cơ các loại: điện, thủy lực, khí nén hoặc kết hợp giữa chúng.
- Hệ thống cảm biến gồm các sensor và thiết bị chuyển đổi tín hiệu cần thiết khác. Các Robot cần hệ thống sensor trong để nhận biết trạng thái của bản thân các cơ cấu của Robot và các sensor ngoài để nhận biết trạng thái của môi trường.
- Hệ thống điều khiển (controller) và giao diện người dùng hiện nay thường là máy tính để giám sát và điều khiển hoạt động của Robot.
Hình 1.3 Sơ đồ cấu trúc chung của Robot công nghiệp
Tay máy là phần cơ sở, quyết định khả năng làm việc của RBCN. Đó là thiết bị cơ khí đảm bảo cho Robot khả năng chuyển động trong không gian và khả năng làm việc như nâng hạ vật, lắp ráp,…Ban đầu,việc thiết kế và chế tạo tay máy là phỏng tác cấu tạo và chức năng của tay người. Về sau, đây không còn là điều bắt buộc nữa. Tay máy hiện nay rất đa dạng và có nhiều loại có dáng vẻ khác rất xa với tay người. Tuy nhiên, trong kỹ thuật Robot người ta vẫn dùng các thuật ngữ quen thuộc như: vai, cánh tay, cổ tay, bàn tay và các khớp… để chỉ tay máy và các bộ phận của nó.
Trong thiết kế và sử dụng tay máy, người ta quan tâm đến các thông số có ảnh hưởng lớn đến khả năng làm việc của chúng như:
-Sức nâng, độ cứng vững, lực kẹp của tay,…
-Tầm với hay vùng làm việc: kích thước và hình dạng vùng mà phần công tác có thể với tới.
-Sự khéo léo, nghĩa là khả năng định vị và định hướng phần công tác trong vùng làm việc. Thông số này liên quan đến số bậc tự do của phần công tác.
Ngoài ra để định vị và định hướng phần công tác một cách tùy ý trong không gian 3 chiều cần có 6 bậc tự do, trong đó 3 bậc tự do để định vị trí, 3 bậc tự do để định hướng.
1.3 Xu hướng phát triển
Nhằm mục tiêu thiết kế, chế tạo các thế hệ Robot công nghiệp ngày càng thông minh, linh hoạt, nhỏ gọn, tin cậy, chính xác, tuổi thọ cao... một số vấn đề sau đang được các nhà khoa học quan tâm giải quyết :
- Tối ưu hóa cấu trúc cơ khí với việc chú ý tới việc sử dụng vật liệu nhẹ, độ bền cao
- Các bài toán cơ học : động hoc, động lực học-điều khiển, cân bằng…
- Các cơ cấu dẫn động và cảm nhận tín hiệu cũng là vấn đề quan tâm lớn trong kỹ thuật Robot.
- Điều khiển thông minh là hướng phát triển lớn của kỹ thuật Robot, thu hút nhiều sự quan tâm của nhiều nhà khoa học trên thế giới.
Ngành công nghệ ô tô của Việt Nam nói chung hay toàn thế giới thì xu hướng tự động hóa sản xuất, hạn chế sử dụng con người thay vào đó là cánh tay robot có thể làm việc liên tục và chính xác tạo năng suất cao. Vì vậy sản xuất ô tô đã và đang được sản xuất tự động hóa bằng robot.
1.4 Ứng dụng của Robot công nghiệp vào việc sản xuất ô tô hiện nay
Trong hơn 50 năm, ngành công nghiệp ô tô đã sử dụng robot trong dây chuyền lắp ráp của họ cho nhiều quy trình sản xuất khác nhau. Ngày nay, các nhà sản xuất ô tô đang khám phá việc sử dụng robot trong nhiều quy trình hơn nữa. Robot hiệu quả hơn, chính xác, linh hoạt và đáng tin cậy hơn vào các dây chuyền sản xuất này. Công nghệ này đã cho phép ngành công nghiệp ô tô vẫn là một trong những chuỗi cung ứng tự động hóa nhất trên toàn cầu và là một trong những ngành sử dụng rô bốt nhiều nhất.
Với hàng nghìn dây điện và các bộ phận trên mỗi chiếc xe, phải mất một quá trình sản xuất phức tạp để đưa các bộ phận đến nơi cần thiết. Dưới đây là một số ứng dụng robot quan trọng đối với một dây chuyền lắp ráp hiệu quả:
- Tầm nhìn robot
Một cánh tay robot công nghiệp nhẹ có “mắt” có thể thực hiện công việc chính xác hơn vì nó có thể “nhìn thấy” những gì nó đang làm. Cổ tay robot mang tia laser và dãy camera giúp máy phản hồi tức thì. Giờ đây, rô bốt có thể thực hiện bù trừ thích hợp khi lắp đặt một bộ phận, vì chúng biết nó đi đâu. Việc lắp đặt các tấm cửa, kính chắn gió và chắn bùn chính xác hơn với tầm nhìn của robot so với các cánh tay robot thông thường.
- Trong hầu hết các nhà máy sản xuất ô tô, các cánh tay robot nhẹ lắp ráp các bộ phận nhỏ hơn như động cơ và máy bơm với tốc độ cao. Các công việc khác như vặn vít, lắp bánh xe, lắp kính chắn gió đều do cánh tay robot thực hiện.
- Công việc của một thợ sơn ô tô không hề dễ dàng và việc khởi động rất độc hại. Tình trạng thiếu lao động cũng khiến việc tìm thợ sơn chuyên nghiệp, có tay nghề cao trở nên khó khăn hơn. Các cánh tay robot có thể lấp đầy khoảng trống vì công việc đòi hỏi sự nhất quán cho mỗi lớp sơn. Robot có thể đi theo một con đường được lập trình sẵn, luôn bao phủ các khu vực rộng lớn và hạn chế lãng phí. Máy cũng rất hữu ích để phun chất kết dính, chất bịt kín và sơn lót.
- Robot có thể đi theo một con đường phức tạp nhiều lần mà không hỏng hóc, khiến nó trở thành công cụ hoàn hảo cho các công việc cắt và tỉa. Robot nhẹ với công nghệ cảm ứng lực phù hợp hơn với loại công việc này. Các công việc bao gồm cắt tỉa đèn flash từ khuôn nhựa, khuôn đánh bóng và cắt vải.
- Robot sản xuất ô tô mang lại cho các công ty ô tô một lợi thế cạnh tranh. Họ nâng cao chất lượng và giảm chi phí bảo hành; tăng công suất và giải tỏa tắc nghẽn; và bảo vệ người lao động khỏi những công việc bẩn thỉu, khó khăn và nguy hiểm. Các nhà máy lắp ráp ô tô chỉ sử dụng robot để hàn và sơn tại chỗ, nhưng có nhiều cơ hội khác để sử dụng robot trong toàn bộ chuỗi cung ứng. OEM, Tier 1 và các nhà sản xuất linh kiện khác đều có lợi từ việc sử dụng robot trong ngành sản xuất xe hơi.
Các nhà sản xuất chuyển sang sử dụng robot vì nhiều lý do. Trong ngành công nghiệp ô tô, ba trong số những động lực lớn nhất là chất lượng, năng lực và an toàn.
- Ưuđiểm của việc áp dụng robot vào sản xuất
+ Tăng chất lượng sản xuất ô tô
Robot của nhà máy sản xuất ô tô làm giảm khả năng thay đổi từng phần. Có khả năng lặp lại cao, chúng không bao giờ mệt mỏi hoặc bị phân tâm, vì vậy mọi chu kỳ đều được thực hiện theo cùng một cách. Họ cũng không làm rơi các bộ phận hoặc xử lý chúng theo cách gây ra hư hỏng. Điều đó làm giảm lãng phí trước đây do lỗi của con người, điều này cũng có nghĩa là ít thay đổi hơn trong việc lắp ráp xe hơi. Được trang bị hệ thống thị giác, rô bốt ô tô thậm chí có thể phát hiện sự thay đổi của vật liệu đến và điều chỉnh đường đi được lập trình của chúng cho phù hợp. Điều này dẫn đến sự hài lòng của khách hàng cao hơn, ít lỗi hơn và chi phí bảo hành thấp hơn.
+ Giải quyết năng lực sản xuất
Chuỗi cung ứng ô tô vận hành tinh gọn với lượng hàng tồn kho tối thiểu để chống lại sự chậm trễ trong sản xuất. Các nhà sản xuất phụ tùng ô tô luôn cố gắng đạt được thời gian nhất quán và kiểm soát quy trình trong từng bước của dây chuyền sản xuất. Ngay cả vấn đề nhỏ nhất cũng có thể dừng một dây chuyền lắp ráp. Robot không bị mệt mỏi khi kết thúc ca làm việc, vì vậy thời gian chu kỳ là không đổi cả ngày, hàng ngày và tốc độ sản xuất cao nhất là nhất quán. Hơn nữa, việc chạy rô-bốt qua các thời gian nghỉ và thay đổi ca sẽ mang lại sản lượng bổ sung từ các dây chuyền sản xuất khi so sánh với các dây chuyền được thực hiện thủ công.
+ Bảo vệ người lao động
Nhiều công việc trong sản xuất ô tô rất nguy hiểm. Đôi khi, những nguy hiểm là rõ ràng, như khi đổ kim loại nóng chảy trong một xưởng đúc. Những lần khác, chúng ngấm ngầm hơn, giống như các rối loạn cơ xương do nâng, vặn và chuyển động lặp đi lặp lại. Robot có thể ngăn chặn những nguy cơ này đối với con người. Trong lắp ráp ô tô, robot giữ cho công nhân không tiếp xúc với khói từ quá trình hàn và sơn, cũng như tia lửa hàn và tiếng ồn của máy dập. Người máy ô tô cắt giảm các khiếu nại về tai nạn và thương tích bằng cách loại bỏ người lao động khỏi những công việc và môi trường bẩn thỉu và nguy hiểm này.
+ Thêm tính linh hoạt
Robot ô tô có ba ưu điểm so với tự động hóa cứng hoặc chuyên dụng
+ Thời gian thay đổi tối thiểu từ một công việc đến công việc tiếp theo: Thiết kế bộ kẹp linh hoạt thường là tất cả những gì cần thiết để tải một chương trình phần mới.
+ Khả năng xử lý sản phẩm trong gia đình:Cho dù đó là rô bốt dây chuyền lắp ráp ô tô, hàn điểm các kiểu thân xe khác nhau liên tiếp nhanh chóng hay đèn nháy cắt tỉa bằng máy nhỏ gọn từ một loạt các khuôn nhựa, rô bốt có thể chuyển đổi linh hoạt gần như ngay lập tức. Bằng cách sử dụng hệ thống thị giác hoặc công nghệ khác như thẻ RFID, có thể xử lý nhiều bộ phận khác nhau.
+ Ít rủi ro tham gia: Khi một dòng sản phẩm biến mất, rô bốt có thể được triển khai lại với ít chi phí bổ sung hoặc miễn phí. Ngược lại, tự động hóa cứng thường bị loại bỏ.
Có hàng nghìn bộ phận trong mỗi ô tô và xe tải, và cần vô số quy trình sản xuất để tạo ra chúng. Những tiến bộ trong công nghệ rô bốt ô tô, chẳng hạn như hệ thống thị giác và cảm biến lực, có nghĩa là nhiều thứ trong số này phù hợp hơn bao giờ hết để tự động hóa robot.
1.4.1 Ứng dụng trong sản xuất ô tô
- Hàn (SPOT VÀ ARC): Robot lớn có khả năng chịu tải cao và tầm với xa có thể hàn các tấm thân xe; trong khi các robot nhỏ hơn hàn các cụm lắp ráp phụ như giá đỡ và giá đỡ. Hàn hồ quang MIG và TIG robot định vị mỏ hàn theo cùng một hướng trong mỗi chu kỳ, tốc độ lặp lại và khoảng cách hồ quang đảm bảo mọi chế tạo đều được hàn theo cùng một tiêu chuẩn cao.
Hình 1.4: Robot hàn thân, vỏ ô tô
- Lắp ráp: Các công việc như vặn vít, lắp kính chắn gió và lắp bánh xe đều là những ứng cử viên cho cánh tay robot trong các nhà máy sản xuất xe hơi. Trong nhiều nhà máy sản xuất linh kiện ô tô, rô bốt - ví dụ như máy “Delta” tốc độ cao - đang lắp ráp các cụm thành phần nhỏ hơn như máy bơm và động cơ.
Hình 1.5: Robot lắp ráp
- Dùng máy: Dỡ khuôn nóng từ máy ép phun hoặc máy đúc khuôn, và xếp dỡ các trung tâm gia công CNC là tất cả các ví dụ điển hình về robot chăm sóc máy sản xuất.
Hình 1.6 Phôi cuộn kim loại
Loại bỏ vật liệu: Bởi vì nó có thể đi theo một con đường phức tạp lặp đi lặp lại, rô bốt là một công cụ lý tưởng cho các công việc cắt và tỉa nhẹ. Ví dụ bao gồm cắt các loại vải như tiêu đề, trang trí đèn flash từ khuôn nhựa và khuôn đúc, và khuôn đánh bóng. Công nghệ cảm ứng lực cho phép robot duy trì áp lực liên tục lên bề mặt trong các ứng dụng như thế này.
- Phần chuyển giao: Đổ kim loại nóng chảy trong xưởng đúc và chuyển một con tem kim loại từ máy ép này sang máy ép khác là những công việc khó chịu đối với công nhân con người, nhưng chúng là những nhiệm vụ lý tưởng của robot.
........
Với mục tiêu là triển khai loại robot 6 bậc tự do sao cho việc chế tạo không quá khó khăn, phức tạp và giá thành hợp lý, trong phạm vi đồ án tốt nghiệp chúng em sẽ chọn Robot KUKA để phân tích, tính toán, thiết kế, chế tạo, điều khiển và lập trình.
2.1 Phân tích lựa chọn thiết kế
a, Vật liệu
Thay vì sử dụng nhôm tấm, thanh nhôm định hình, nhựa mica cùng với phương pháp gia công cắt gọt thường được sử dụng để chế tạo các mô hình robot. Cánh tay robot 6 bậc của bọn em sử dụng phương pháp in 3D với nhựa ABS để in các chi tiết cho cánh tay robot.
Bằng phương pháp in 3D có thể thực hiện được ở tất cả các loại mẫu thiết kế, không bị hạn chế bởi độ phức tạp của bề mặt hay độ khó về cấu trúc thiết kế. Chỉ cần 1 lần thao tác là có thể in ra được toàn bộ sản phẩm dù có cấu trúc phức tạp đến đâu.
Có 2 loại nhựa phổ biến được sử dụng rộng rãi trong in 3D vì đặc tính vả giá thành hợp lý là nhựa ABS và nhựa PLA.
- Nhựa ABS cứng rắn nhưng không giòn, cân bằng tốt giữa độ bền kéo, va đập, độ cứng bề mặt, độ rắn, độ chịu nhiệt các tính chất ở nhiệt độ thấp và các đặc tính về điện. Có tính chất đặc trưng là độ bền cơ học cao, độ cứng cao, khả năng chịu va đập không giảm nhanh ở nhiệt độ thấp, độ ổn định dưới tải trọng rất tốt, ABS chịu nhiệt tương đương hoặc tốt hơn Acetal, PC…ở nhiệt độ phòng.Nhiệt độ in của nhựa ABS khá cao từ 230 độ C trở lên.
- Nhựa PLA tương đối dòn, cơ tính thấp, nhưng sản phẩm in ra khá đẹp và đầy đủ chi tiết. Việc sử dụng nhựa PLA khó khăn vì nó giòn khi nó đã hạ nhiệt. Ngưỡng nhiệt độ của nó là thấp hơn so với ABS. Nhiệt độ in của PLA cũng tương đối thấp, tầm dưới 190 độ C.
- Về chi phí thì nhựa ABS có giá rẻ hơn nhựa PLA ( 14-60$ / 1kg nhựa ABS so với 19-75$ / 1kg nhựa PLA ).
Việc lựa chọn nhựa ABS để in các chi tiết cho cánh tay Robot là phù hợp.
.......
2.3 Thiết kế mô hình trên Solidworks
2.3.1 Giới thiệu phần mềm Solidworks
Hiện nay Solidworks được sử dụng khá phổ biến trên thế giới. Ở Việt Nam phần mềm này được sử dụng rất nhiều không chỉ trong lĩnh vực cơ khí mà nó còn được mở rộng ra các lĩnh vực khác như: Điện, khoa học ứng dụng, cơ mô phỏng,..
Phần mềm Solidworks cung cấp cho người dùng những tính năng tuyệt vời nhất về thiết kế các chi tiết các khối 3D, lắp ráp các chi tiết đó để hình thành nên nhưng bộ phận của máy móc, xuất bản vẽ 2D các chi tiết đó là những tính năng rất phổ biến của phần mềm Solidworks, ngoài ra còn có những tính năng khác nữa như: Phân tích động học ( motion), phân tích động lực học (simulation). Bên cạnh đó phần mềm cong tích hợp modul Solidcam để phục vụ cho việc gia công trên CNC nhờ có phay Solidcam và tiện Solidcam hơn nữa bạn cũng có thể gia công nhiều trục trên Solidcam, modul 3Dquickmold phục vụ cho việc thiết kế khuôn.
Việc tích hợp nhiều tính năng và modul cũng như các Add-in trên phần mềm Solidworks giúp cho người sử dụng chuyên môn hóa trên phần mềm hơn. Và không cần phải sử dụng nhiều phần mềm để thực hiện các công việc khác nhau.
Các chức năng CAD,CAE,CAM.
Giao diện thiết kế
Hình 2.13 Giao diện thiết kế
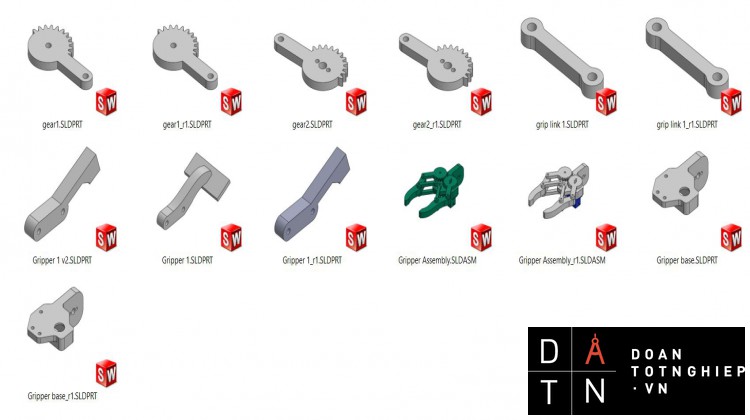
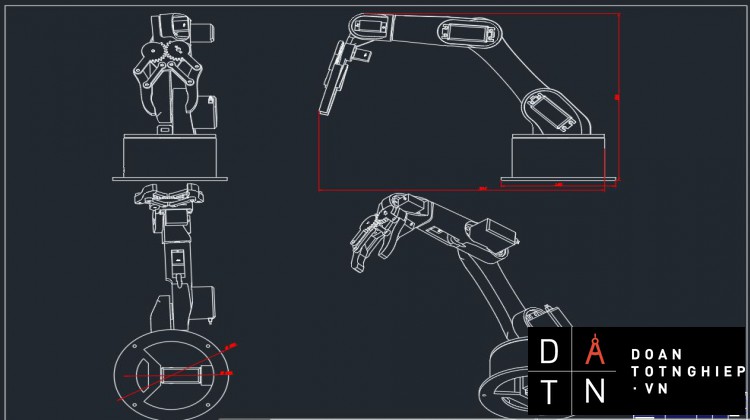
2.3.2 Thiết kế Robot
Robot gồm 6 khớp quay được mô phỏng theo thiết kế robot KUKA sử dụng bộ truyền bánh răng làm tăng tỷ số truyền từ động cơ để có thể đáp ứng được các yêu cầu khi gắp vật. Robot được hình thành bởi 5 khâu . Các khâu được kết nối truyền động với nhau qua hệ thống động cơ servo , mỗi khớp quay sẽ là một bậc tự do của robot.









