THIẾT KẾ ROBOT TAY MÁY 5 TRỤC BẬC TỰ DO




NỘI DUNG ĐỒ ÁN
THIẾT KẾ ROBOT TAY MÁY 5 TRỤC BẬC TỰ DO,thiết kế máy, , thuyết minh, động học máy, kết cấu máy, nguyên lý máy, quy trình sản xuất
Mục lục:
Chương I: Tổng Quan 10
I. Giới thiệu chung Robot: 10
1. Khái niệm Robot: 10
2. Một số hình ảnh về Robot được ứng dụng trong cuộc sống: 10
3. Sơ lược về tay máy Robot công nghiệp: 11
II. Nội dung đề tài: 15
III. Ý nghĩa đề tài: 15
IV. Phương pháp nghiên cứu: 15
V. Những khó khăn của đề tài: 16
Chương II: Thiết Kế Và Thi Công 17
I. Cơ khí: 17
1. Tay máy: 17
2. Băng tải: 24
3. Giới thiệu động cơ RC Servo: 30
II. Điện tử: 33
1. Khối nguồn 5V: 33
2. Khối hiển thị LCD: 34
3. Khối biến trở và nút nhấn: 51
4. Khối cách ly vi điều khiển với RC servo: 52
5. Khối vi điều khiển Pic 16F877A và giao tiếp I2C: 53
6. EEPROM 24C16: 66
III. Điều khiển: 68
1. Lưu đồ giải thuật: 68
2. Hướng dẫn sử dụng tay máy: 82
Chương III: Kết Quả Và Hướng Phát Triển 85
1. Kết quả trong đồ án môn học: 85
2. Kết quả chưa đạt được và hạn chế trong đồ án môn học: 85
3. Hướng phát triển đồ án môn học: 85
4. Tài liệu tham khảo: 86
Chương IV: Phụ Lục 87
Mục lục hình vẽ:
Hinh 1.1: Urbie của NASA có thể leo cầu thang 10
Hình 1.2: Robot hút bụi của tập đoàn iRobot 10
Hình 1.3: Robot công nghiệp của hãng Tosy Việt Nam 10
Hình 1.4: ASIMO là robot có những hoạt động rất giống người 10
Hình 1.5: Tay máy Robot công nghiệp đang làm việc trong nhà máy sản xuất 11
Hình 1.6: Toạ độ suy rộng của Robot 12
Hình 1.7: Qui tắc bàn tay phải 13
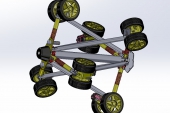
Hình 2.1: Robot Arm của 1 số sinh viên 17
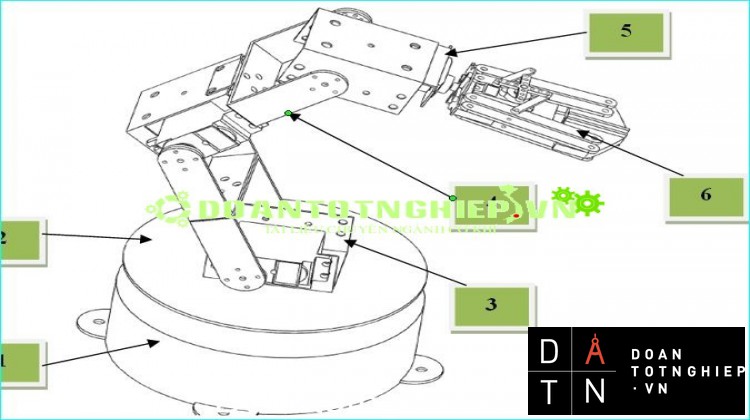
Hình 2.2: Mẫu thiết kế solidwork 18
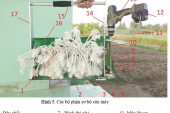
Hình 2.3: Mô hình tay máy thực tế trước đây ( bài tập lớn CĐT) 18
Hình 2.4: Mô hình tay máy tay máy hiện tại 18
Hình 2.5: Mẫu thiết kế Solidwork ( băng tải) 29
Hinh 2.6: Cấu trúc bên trong RC servo 30
Hình 2.7: RC servo MG 996R 31
Hình 2.8: Tín hiệu điều khiển động cơ RC servo 31
Hình 2.9: Điều khiển vị trí của trục ra của động cơ bằng cách điều chế độ rộng xung 32
Hình 2.10: Mạch nguồn 5V 33
Hình 2.11: LCD HD44780 34
Hình 2.12: Sơ đồ khối của HD44780 36
Hình 2.13: Bảng chức năng RS và R/W để sử dụng 37
Hình 2.14: Giản đồ xung cập nhật AC 38
Hình 2.15: Mối liên hệ giữa địa chỉ DDRAM và vị trí hiển thị của LCD 38
Hình 2.16: Mối liên hệ giữa địa chỉ ROM và dữ liệu tạo mẫu kí tự 39
Hình 2.17: Bảng mã kí tự (ROM code A00) 40
Hình 2.18: Mối liên hệ giữa địa chỉ của CGRAM, dữ liệu của CGRAM, và mã kí tự 41
Hình 2.19: Mạch LCD HD44780 50
Hình 2.20: Nút nhấn và biến trở 51
Hình 2.21: Mạch nút nhấn và biến trở 51
Hình 2.22: Opto PC817 52
Hình 2.23: Mạch cách ly RC servo với vi điều khiển bằng Opto 52
Hình 2.24: Sơ đồ chân của Pic 16F877A 53
Hình 2.25: Sơ đồ khối của Pic 16F877A 55
Hình 2.26: BUS I2C và các thiết bị ngoại vi 56
Hình 2.27: Truyền nhận dữ liệu giữa chủ/tớ 57
Hình 2.28: Điều kiện START và STOP của bus I2C 58
Hình 2.29: Quá trình truyền 1 bit dữ liệu 59
Hình 2.30: Dữ liệu truyền trên bus I2C 59
Hình 2.31: Bit ACK trên bus I2C 60
Hình 2.32: Lưu đồ thuật toán quá trình truyền nhận dữ liệu 60
Hình 2.33: Cấu trúc byte dữ liệu đầu tiên 61
Hình 2.34: Quá trình truyền dữ liệu 61
Hình 2.35: Ghi dữ liệu từ chủ đến tớ 62
Hình 2.36: Đọc dữ liệu từ thiết bị tớ 62
Hình 2.37: Quá trình phối hợp đọc/ghi dữ liệu 62
Hình 2.38: Mạch giao tiếp I2C 65
Hình 2.39: Cấu trúc chân 24C16 66
Hình 2.40: Địa chỉ eeprom 66
Hình 2.41: Mạch Eeproom 24C16 67
Hình 2.42: Hình ảnh thực tế mạch điện tử điều khiển tay máy 67
Hình 2.43: Giới thiệu sơ lược SVTH và GVHD qua LCD 81
Hình 2.44: Màn hình LCD hiển thị 2 chế độ cần hoạt động 82
Hình 2.45: Màn hình LCD hiển thị 2 chế độ cần dừng hoạt động 83
Chương I: Tổng Quan
Sự phát triển của khoa học kỹ thuật ngày càng nhanh góp phần nâng cao năng suất lao động. Đặc biệt là sự ra đời và phát triển của công nghệ chế tạo Robot nhằm tạo ra sự tự động hóa trong quá trình sản xuất giảm đi sức lao động bằng chân tay của người lao động. Qua đây, tay máy robot (Robot Arm) được ứng dụng rất nhiều trong cuộc sống.
- Giới thiệu chung Robot:
- Khái niệm Robot:
Robot hay người máy là một loại máy có thể thực hiện những công việc một cách tự động bằng sự điều khiển của máy tính hoặc các vi mạch điện tử được lập trình.
Robot là một tác nhân cơ khí, nhân tạo, ảo, thường là một hệ thống cơ khí và điện tử. Với sự xuất hiện và chuyển động của mình, robot gây cho người ta cảm giác rằng nó giác quan giống như con người. Từ "robot" (người máy) thường được hiểu với hai nghĩa: robot cơ khí và phần mềm tự hoạt động.
Một số hình ảnh về Robot được ứng dụng trong cuộc sống.................................................
- Sơ lược về tay máy Robot công nghiệp:
- Khái niệm chung:
Robot sản xuất phổ biến nhất là tay máy công nghiệp. Một tay máy công nghiệp tiêu biểu bao gồm 7 thành phần làm bằng kim loại được nối với nhau bằng 6 khớp. Máy tính điều khiển robot bằng cách quay từng động cơ được nối với từng khớp (một số cánh tay robot cỡ lớn dùng thủy lực hay khí nén).Robot sử dụng các cảm biến chuyển động để đảm bảo nó chuyển động đến đúng vị trí mong muốn
- Bậc tự do của Robot:
Bậc tự do là số khả năng chuyển động của một cơ cấu (chuyển động quay hoặc tịnh tiến). Để dịch chuyển được một vật thể trong không gian, cơ cấu chấp hành của Robot phải đạt được một số bậc tự do. Nói chung cơ hệ của Robot là một cơ cấu hở, do đó bậc tự do của nó có thể tính theo công thức :
Trong đó:
n - Số khâu động;
pi - Số khớp loại i (i = 1,2,. . .,5: Số bậc tự do bị hạn chế).
Đối với các cơ cấu có các khâu được nối với nhau bằng khớp quay hoặc tịnh tiến (khớp động loại 5) thì số bậc tự do bằng với số khâu động. Đối với cơ cấu hở, số bậc tự do bằng tổng số bậc tự do của các khớp động.
Để định vị và định hướng khâu chấp hành cuối một cách tuỳ ý trong không gian 3 chiều Robot cần có 6 bậc tự do, trong đó 3 bậc tự do để định vị và 3 bậc tự do để định hướng.
Một số công việc đơn giản nâng hạ, sắp xếp ... có thể yêu cầu số bậc tự do ít hơn. Các robot hàn, sơn... thường yêu cầu 6 bậc tự do. Trong một số trường hợp cần sự khéo léo, linh hoạt hoặc khi cần phải tối ưu hoá quỹ đạo, ... người ta dùng Robot với số bậc tự do lớn hơn 6.
- Hệ toạ độ:
Mỗi Robot thường bao gồm nhiều khâu liên kết với nhau qua các khớp, tạo thành một xích động học xuất phát từ một khâu cơ bản đứng yên. Hệ toạ độ gắn với khâu cơ bản gọi là hệ toạ độ cơ bản (hay hệ toạ độ chuẩn). Các hệ toạ độ trung gian khác gắn với các khâu động gọi là hệ toạ độ suy rộng. Trong từng thời điểm hoạt động, các toạ độ suy rộng xác định cấu hình của robot bằng các chuyển dịch dài hoặc các chuyển dịch góc cuả các khớp tịnh tiến hoặc khớp quay (như hình 1.6). Các toạ độ suy rộng còn được gọi là biến khớp.
Các hệ toạ độ gắn trên các khâu của Robot phải tuân theo qui tắc bàn tay phải: Dùng tay phải, nắm hai ngón tay út và áp út vào lòng bàn tay, xoè 3 ngón: cái, trỏ và giữa theo 3 phương vuông góc nhau, nếu chọn ngón cái là phương và chiều của trục z, thì ngón trỏ chỉ phương, chiều của trục x và ngón giữa sẽ biểu thị phương, chiều của trục y (hình 1.6).
Trong Robot ta thường dùng chữ O và chỉ số n để chỉ hệ toạ độ gắn trên khâu thứ n. Như vậy hệ toạ độ cơ bản (Hệ toạ độ gắn với khâu cố định) sẽ được ký hiệu là O0; hệ toạ độ gắn trên các khâu trung gian tương ứng sẽ là O1, O2,..., On-1, hệ toạ độ gắn trên khâu chấp hành cuối ký hiệu là On.
Hình 1.7: Qui tắc bàn tay phải
- Cấu trúc:
Một robot công nghiệp có 6 khớp rất giống với một cánh tay của con người gồm có vai, khuỷu tay và cổ tay. Thường thì vai sẽ được gắn với một bệ cố định hơn là một cơ thể di động. loại robot này có 6 bậc tự do, có nghĩa là nó có thể quay theo 6 hướng khác nhau. Cánh tay của một người bình thường có 7 bậc tự do.
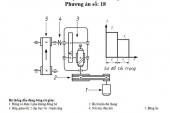
- Các thành phần chính của Robot
Một Robot thường bao gồm các thành phần chính như: cánh tay Robot, nguồn động lực, dụng cụ gắn lên khâu chấp hành cuối, các cảm biến, bộ điều khiển, bộ điều khiển bằng tay (tech pendan), máy tính ... các phần mềm lập trình cũng nên được coi là một thành phần của hệ thống Robot. Mối quan hệ giữa các thành phần trong Robot như hình 1.8.Nguồn động lực là các động cơ điện (một chiều hoặc động cơ bước), các hệ thống xy lanh khí nén, thuỷ lực để tạo động lực cho tay máy hoạt động. Dụng cụ thao tác được gắn trên khâu cuối của Robot, dụng cụ của Robot có thể có nhiều kiểu khác nhau như: dạng bàn tay để nắm bắt đối tượng hoặc các công cụ làm việc như mỏ hàn, đá mài, đầu phun sơn ...
Bộ tech pendant thường dùng để điều khiển Robot bằng tay và có thể lập trình cho các hoạt động đơn giản của Robot .
Các phần mềm để lập trình và các chương trình điều khiển Robot được cài đặt trên máy tính, dùng điều khiển Robot thông qua bộ điều khiển. Bộ điều khiển còn được gọi là mođun điều khiển, nó thường được kết nối với máy tính. Một mođun điều khiển có thể còn có các cổng vào - ra để làm việc với nhiều thiết bị khác nhau như các cảm biến giúp Robot nhận biết trạng thái của bản thân, xác định vị trí của đối tượng làm việc hoặc các dò tìm khác; điều khiển các băng tải hoặc cơ cấu cấp phôi hoạt động phối hợp với Robot.
- Kết cấu của tay máy
Như đã nói trên, tay máy là thành phần quan trọng, nó quyết định khả năng làm việc của Robot. Các kết cấu của nhiều tay máy được phỏng theo cấu tạo và chức năng của tay người; tuy nhiên ngày nay, tay máy được thiết kế rất đa dạng, nhiều cánh tay Robot có hình dáng rất khác xa cánh tay người. Trong thiết kế và sử dụng tay máy, chúng ta cần quan tâm đến các thông số hình - động học, là những thông số liên quan đến khả năng làm việc của Robot như: Tầm với (hay trường công tác), số bậc tự do (thể hiện sự khéo léo linh hoạt của Robot), độ cứng vững, tải trọng vật nâng, lực kẹp . . .
Các khâu của Robot thường thực hiện hai chuyển động cơ bản :
• Chuyển động tịnh tiến theo hướng x, y, z trong không gian Descarde, thông thường tạo nên các hình khối, các chuyển động này thường ký hiệu là T hoặc P.
• Chuyển động quay quanh các trục x, y, z ký hiệu là R.
Tuỳ thuộc vào số khâu và sự tổ hợp các chuyển động (R và T) mà tay máy có các kết cấu khác nhau với vùng làm việc khác nhau. Các kết cấu thường gặp của Robot là robot kiểu toạ độ Đề các, toạ độ trụ, toạ độ cầu, Robot kiểu SCARA, hệ toạ độ góc (phỏng sinh) ...
- Hoạt động chung của tay máy Robot công nghiệp:
Công việc của cánh tay người là di chuyển bàn tay từ điểm này đến điểm khác. Tương tự như thế, cánh tay robot để di chuyển cơ cấu cuối cùng từ điểm này đến điểm khác. Bạn có thể cố định dạng chuyển động của cánh tay robot với một số loại cơ cấu chấp hành cuối cùng tùy theo từng ứng dụng. Một cơ cấu chấp hành thông dụng là một phiên bản thu nhỏ của một bàn tay có thể cầm nắm các vật khác nhau. Các cánh tay robot thường có các cảm biến áp suất gắn bên trong để thông báo cho máy tính biết cần bao nhiêu lực để gắp một vật, giúp cho nó không đánh rơi hay làm vỡ đồ vật nó đang giữ.
Robot công nghiệp được thiết kế để làm những công việc lặp đi lặp lại chính xác, trong một môi trường được điều khiển. Để dạy robot làm công việc của mình, người lập trình sẽ dẫn cánh tay qua những chuyển động nhờ sử dụng những điều khiển bằng tay. Những robot này sẽ lưu trữ trình tự chuyển động chính xác trong bộ nhớ của nó và lặp đi lặp lại chuyển động này trên các dây truyền lắp ráp.
Qua những dữ liệu tìm hiểu và phân tích tay máy Robot công nghiệp đã đưa hướng đi của chúng em với đồ án môn học Cơ điện từ: Robot Arm 5 DOF (tay máy robot 5 bậc tư do).
- Nội dung đề tài:
- Yêu cầu chế tạo hoàn thiện mô hình cánh tay Robot 5 bậc tự do bằng động cơ RC servo, hoạt động được các khớp tay máy 1 cách linh hoạt và chính xác.
- Điều quan trọng hơn hết của đề tài là việc tính toán thiết kế, chế tạo, nguyên lý hoạt động của tay máy và phần lý thuyết vẽ mạch giao tiếp I2C và mạch điều khiển bằng hệ thống vi điều khiển.
- Cánh tay Robot hoan thiện tốt được 3 chế độ Manual, Autorun và Practice.
- Ý nghĩa đề tài:
Đề tài điều khiển cánh tay Robot là một ứng dụng thực tế mà hiện nay dạng phát triển mạnh mẽ, đa dạng và sinh động, nó được ứng dụng nhiều trong các nhà máy sản xuất nhằm giảm bớt công sức lao động của con người đồng thời nâng cao số lượng cũng như chất lượng của sản phẩm, nên nó phù hợp nhiều ứng dụng thực tế,... Việc trình bày thao tác đối với cánh tay Robot, nhất là động cơ RC servo được ứng dụng trong các phòng thí nghiệm và trường học, nhằm tăng sự phát triển cho sinh viên và học sinh có khả năng tiếp cận với thực tế nhiều hơn, khả năng tư duy cao hơn….
- Phương pháp nghiên cứu:
- Tìm hiểu vi xử lí PIC16F877A phần cứng và tập lệnh.
- Tìm hiểu ngôn ngữ lập trình và biên dịch CCS, viết chương trình và biên dịch ra file.hex nạp cho vi điều khiển PIC.Viết chương trình điều khiển cho một động cơ RC servo quay một góc xác định bằng kit thực hành đa năng.
- Tìm hiểu về LCD và giao tiếp I2C.
- Thiết kế phần cơ khí và chế tạo Robot.
- Thiết kế mạch điều khiển và thử nghiệm cho quay từng khớp của cánh tay máy.
- Lập trình hoàn thiện cánh tay máy Robot.
- Những khó khăn của đề tài:
- Tìm hiểu giải thuật tính toán cơ khí cánh tay Robot còn hạn chế.
- Mạch điều khiển phải đảm bảo ổn định nhất trong việc hoạt động của tay máy, nhất là mạch nguồn để cung cấp vào tay máy. Cảm biến nhận biết phôi của tay máy cần có 1 vị trí xác định và ổn định.
- Lập trình để cho táy máy hoạt động như theo ý muốn là 1 vấn đề khó khăn. Vì chưa có kinh nghiệm nhiều, cho nên để tìm hiểu cách lập trình tốt cần 1 thời gian dài............................
Chương II: Thiết Kế Và Thi Công
- Cơ khí:
- Tay máy:
- Mẫu thiết kế:
Do động cơ RC servo là một loại động cơ có kích thước 40x20x10 mm3 , cho nên trong quá trình thiết trình thiết kế cần tìm hiểu về rất nhiều vật liệu để thiết kế phần cơ khí nhẹ và chịu tải trọng tốt trong lúc hoạt động của động cơ RC servo. Cần thiết kế bộ khung cả tay máy nhỏ gọn và nhẹ để kết nối từng module của từng động cơ lại với nhau.
Ngoài ra, trong phần thiết kế là làm phần đế tay máy thật vững chắc và lúc quay phần thật nhẹ nhàng làm cho động cơ RC servo bớt chịu tải cho cả cánh tay, để khắc phục điều đó cần có 1 bạc đạn cùng gắn chung với RC servo để giảm bớt tải.
Điều quan trọng nhất là phần tay kẹp của tay máy cần thiết kế làm sao trong lúc hoạt động gắp sản phẩm di chuyển từ nơi ban đầu đến nơi kết thúc thật vững chắc và khả năng gắp vật tương đối linh hoạt. Đây là vấn đề trong nhóm đang tìm nhiều phướng án giải quyết.
Trong phần thiết kế cơ khí điều chúng ta cần chú ý là lúc hoạt động của tay máy phải giữ được trọng tâm của tay máy.
Từ những mẫu thiết kế đã được học hỏi từ những sinh viên đã từng làm đề tài này, em đã đưa ra mẫu thiết kế riêng cho nhóm khi làm đồ án môn học này, phù hợp với thời gian đã nhận đồ án và phù hợp với cách lập trình của 1 thành viên trong nhóm. Ngoài ra, mẫu thiết kế tay máy có thể hoạt động tương đối chính xác với những yêu cầu đề ra

Hình 2.3: Mô hình tay máy thực tế

.......................................................................................................................................................................
- Băng tải:
- Tìm hiểu truyền động đai:
Truyền động đai thường được dùng để truyền dẫn giữa các trục tương đối xa nhau và yêu cầu làm việc êm. Bộ truyền có kết cấu khá đơn giản và có thể giữ an toàn cho các chi tiết máy khác khi bị quá tải đột ngột. Tuy nhiên vì có trượt giữa đai và bánh đai nên tỷ số truyền không ổn định
Tùy theo hình dạng và tiết diện có 3 loại đai: đai dẹt, đai hình thang và đai tròn. Trong đó đai dẹt và đai hình thang là phổ biến nhất.
Bộ truyền đai có thể làm việc đến công suất đến 1500KW, nhưng thường dùng trong khoảng 0,3 đến 500KW. Tỷ số truyền của đai dẹt không quá 6, đối với bộ truyền có bánh căng i có thể đến 10. Đối với bộ truyền đai hình thang i không quá 10.
- Các thông số hình học:
........................................................................................................
- Phương pháp nối đai:
Các yếu tố yêu cầu khi nối đai:
- Đảm bảo được sức bền đầu giữa 2 đầu mối nối và tiết diện nguyên hay phải đảm bảo sức bền để bộ truyền làm việc trong thời gian nhất định.
- Trọng lượng, bề dày và độ cứng của đầu nối càng ít so với đoạn đai nguyên càng tốt nhằm tránh sinh ra tải trọng động khi làm việc.
- Có thể nối và phục hồi mối nối 1 cách nhanh chóng.
- Hiện nay có 3 cách nối đai như sau:
- Dán: thường dùng cho đai da và vải cao su, chỗ nối giống như phần nguyên nên có thể làm việc 2 mặt với vận tốc cao nhưng nhược điểm là khả năng chịu tải kém và phụ thuộc vào chất lượng keo
- Khâu : được sử dụng rộng rãi, ưu điểm làm việc được 2 mặt với vận tốc cao, nhược điểm khả năng chịu tải kém và phụ thuộc vào dây nối và chất lượng mối nối.
- Nối bằng vật nối: được sử dụng rộng rãi như dùng bu lông đai ốc, dùng bản lề, dùng ghép đinh tán, móc xương cá, chấu, miếng kẹp và vít. Ưu điểm chắc chắn, khả năng tải cao nhưng có nhược điểm trọng lượng và bề dày nên chỉ dùng với bộ truyền với vận tốc thấp ( v < 10 m/s), làm việc 1 mặt và kích thước bộ truyền lớn,
Chương III: Kết Quả Và Hướng Phát Triển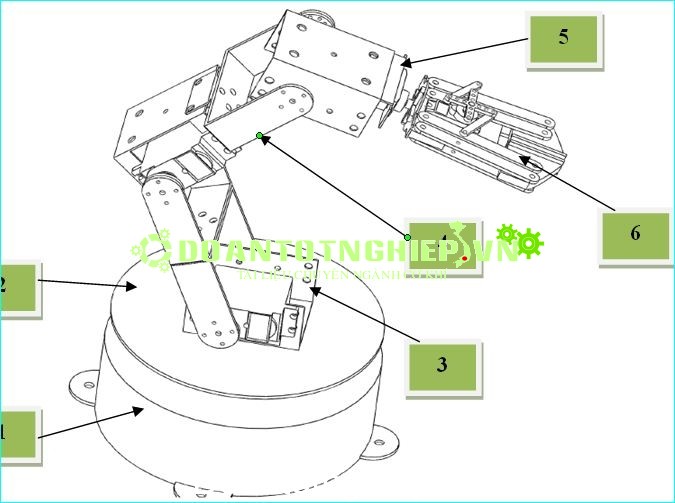
- Kết quả trong đồ án môn học:
Sau 14 tuần thực hiện, đồ án môn học của chúng em đã hoàn tất, sau đây là 1 số kết quả đã được :
- Thiết kế và chế tạo hoàn thành phần cơ khí của tay máy 5 bâc tự do (Robot Arm 5 Dof).
- Thiết kế và chế tạo hoàn thành mạch điện tử bao gồm chung: mạch giao tiếp I2C, mạch biến trở, mạch nguồn 5V để điều khiển động cơ.
- Lập trình và điều khiển RC Servo, lập trình tay máy thực hiện được 3 chế độ: chế độ tự động hoạt động các khớp quay cho trước, điều khiển biến trở để quay từng khớp của tay máy và cuối cùng chế độ dạy học của tay máy nhớ lại đường đi được đưa ra trước.
- Kết quả chưa đạt được và hạn chế trong đồ án môn học:
- Phần tay kẹp còn gặp nhiều trục trặc và khả năng gắp vật nặng còn hạn chế.
- Tay máy chỉ nội suy từng khớp mà chưa nội suy khâu của tay máy để hoạt động.
- Phần tính toán cho tay máy chưa thực hiện được. Ngoài ra chưa đưa ra được các thông số góc quay từng khớp của tay máy.
- Chưa giải quyết được bài toán động học nghịch của tay máy.
- Hướng phát triển đồ án môn học:
- Dù đã cố gắng hết sức nhưng do thời gian có hạn nên việc thực hiện đề tài phải dừng lại. Chúng tôi, những người thực hiện đề tài hy vọng những khóa sau sẽ phát triển hoàn thiện hơn để ứng dụng vào trong sản xuất. Sau đây là một vài đề nghị cho những ai muốn phát triển đề tài:
Dùng vi điều khiển PIC để thiết kế mạch điều khiển giao tiep may tính.
Thiết kế phần giao tiếp với máy tính tạo sự linh hoạt trong điều khiển.
Điều khiển linh hoạt hơn cho tất cả các khớp hoạt động cùng lúc, tạo sự linh hoạt của cánh tay. - Thiết kế băng tải di chuyển vật kết hợp cánh tay máy gắp vật.
- Dùng motor sevor AC để có công suất lớn và tốc độ đáp ứng nhanh. Dùng Matlab kết hợp Solidwork và mô hình thực của tay máy để kiểm tra không gian hoạt động của tay máy...................CLIP