THIẾT KẾ THI CÔNG HỆ THỐNG ĐIỀU KHIỂN MỨC DÙNG GIẢI THUẬT PID TRONG S7-200


NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file step, file Orcad..ASM, HEX file mô phỏng DSN.OPJ MAX... thuyết minh, HỆ THỐNG ĐIỀU KHIỂN MỨC DÙNG GIẢI THUẬT PID TRONG S7-200, THIẾT KẾ THI CÔNG HỆ THỐNG, ĐIỀU KHIỂN MỨC DÙNG GIẢI THUẬT, PID TRONG S7-200
MỤC LỤC
Nội dung Trang
Lời mở đầu.. 01
Chương1. MỞ ĐẦU................................................................................................................. 02
1.1. Đặt vấn đề ......................................................................................................... 02
1.2. Mục đích nghiên cứu........................................................................................ 03
1.3. Đối tượng và phạm vi nghiên cứu................................................................... 03
1.4. Ý nghĩa khoa học ............................................................................................. 03
1.5. Ý nghĩa thực tiễn của đề tài nghiên cứu......................................................... 03
1.6. Nhiệm vụ nghiên cứu........................................................................................ 04
1.7. Phương pháp nghiên cứu.................................................................................. 04
1.8. Kết quả nghiên cứu........................................................................................... 04
Chương 2. TỔNG QUAN VỀ MÔ HÌNH ĐIỀU KHIỂN BỒN NƯỚC................................ 05
2.1. Mô hình hệ thống bồn nước............................................................................. 05
2.1.1. Nguyên lý hoạt động của hệ thống....................................................... 05
2.1.2. Tính toán các bộ phận trong hệ thống.................................................. 05
2.1.3. Mô hình.................................................................................................... 09
2.2. Hệ thống điều khiển.......................................................................................... 10
2.2.1. Bộ điều khiển PLC S7-200.................................................................... 10
2.2.1.1. Programmable Logic Controllers.............................................. 10
2.2.1.2. CPU 224XP................................................................................... 11
2.2.2. Cảm biến đo mức..................................................................................... 14
2.2.2.1. Cảm biến siêu âm......................................................................... 14
2.2.3. Khối nguồn................................................................................................ 19
2.2.3.1. Bộ nguồn....................................................................................... 19
2.2.3.1. Bộ khuyếch đại công suất.......................................................... 20
2.2.4. Thiết bị chấp hành.................................................................................. 21
2.2.4.1. Bơm................................................................................................ 21
Chương 3. WinCC.PHẦN MỀM GIÁM SÁT HỆ THỐNG.................................................. 23
3.1. PC-Access ......................................................................................................... 23
3.2. Phần mềm WinCC 6.0 ...................................................................................... 26
3.3.2.1. Tạo Tag............................................................................................ 26
3.3.2.2. Thiết kế giao diện.......................................................................... 31
Chương 4. THUẬT TOÁN ĐIỀU KHIỂN.............................................................................. 39
4.1. Phương pháp trong phòng thí nghiệm............................................................ 41
4.2. Phương pháp thực nghiệm Zieler Nichols..................................................... 43
Chương 5. KẾT QUẢ............................................................................................................... 50
5.1. Cách thiết lập giá trị ......................................................................................... 50
5.1. Kết quả thực nghiệm bộ điều khiển PID ....................................................... 53
TÀI LIỆU THAM KHẢO......................................................................................................... 59
CHÚ THÍCH CÁC HÌNH ĐƯỢC SỬ DỤNG TRONG ĐỀ TÀI
Hình Trang
Hình 2.1: Khung đế................................................................................................................... 05
Hình 2.2: Lắp bồn vào hệ thống............................................................................................. 06
Hình 2.3: Lắp bơm vào hệ thống............................................................................................ 07
Hình 2.4: Lắp Cảm biến vào hệ thống................................................................................... 07
Hình 2.5: Hệ thống hoàn chỉnh (Bản vẽ thiết kế trên Autocad)........................................ 09
Hình 2.6: Mô hình thiết kế thực tế......................................................................................... 09
Hình 2.7: Cấu tạo cơ bản của một bộ điều khiển................................................................. 11
Hình 2.8: Đặc tính của CPU 224XP....................................................................................... 11
Hình 2.9: Đặc tính ngõ vào số của CPU 224XP................................................................... 12
Hình 2.10: Đặc tính ngõ ra số của CPU 224XP.................................................................... 12
Hình 2.11: Đặc tính ngõ vào Analog của CPU 224XP........................................................ 12
Hình 2.12: Đặc tính ngõ ra Analog của CPU 224XP........................................................... 13
Hình 2.13: Sơ đồ kết nối của CPU 224XP............................................................................. 14
Hình 2.14: Các thành phần cấu tạo bên trong cảm biến siêu âm....................................... 15
Hình 2.15: Cảm biến siêu âm.................................................................................................. 15
Hình 2.16: Thông số đặc tính của cảm biến.......................................................................... 16
Hình 2.17: Thông số kích thước của cảm biến..................................................................... 17
Hình 2.18: Sơ đồ kết nối của cảm biến.................................................................................. 18
Hình 2.19: Sơ đồ Teach-In....................................................................................................... 18
Hình 2.20: Góc búp của cảm biến.......................................................................................... 19
Hình 2.21: Mạch nguồn 24VDC............................................................................................. 19
Hình 2.22: Khối khuyếch đại công suất................................................................................ 20
Hình 2.23: Mạch nguồn 24VDC thực tế................................................................................ 21
Hình 3.1: Mở PC-Access.......................................................................................................... 23
Hình 3.2: Giao diện PC-Access.............................................................................................. 23
Hình 3.3: Thiết lập PLC........................................................................................................... 24
Hình 3.4: Đặt tên cho PLC....................................................................................................... 24
Hình 3.5: Tạo Folder và Item.................................................................................................. 25
Hình 3.6: Sau khi tạo Folder và Item..................................................................................... 26
Hình 3.7: Giao diện giám sát Tag PC-Access....................................................................... 27
Hình 3.8: Mở WinCC 6.0......................................................................................................... 27
Hình 3.9: Tạo một Project mới................................................................................................ 27
Hình 3.10: Giao diện WinCC.................................................................................................. 28
Hình 3.11: Add Driver cho WinCC........................................................................................ 28
Hình 3.12: Thiết lập OPC......................................................................................................... 29
Hình 3.13: Chọn OPC Server.................................................................................................. 29
Hình 3.14: Add Driver cho WinCC........................................................................................ 30
Hình 3.15: Mở S7-200 OPC Server........................................................................................ 30
Hình 3.16: Chọn Tag từ PC-Access........................................................................................ 31
Hình 3.17: Kết nối PC-Access và WinCC qua OPC............................................................. 31
Hình 3.18: Nạp Tag từ PC Access........................................................................................... 32
Hình 3.19: Sau khi nạp Tag từ PC Access............................................................................. 32
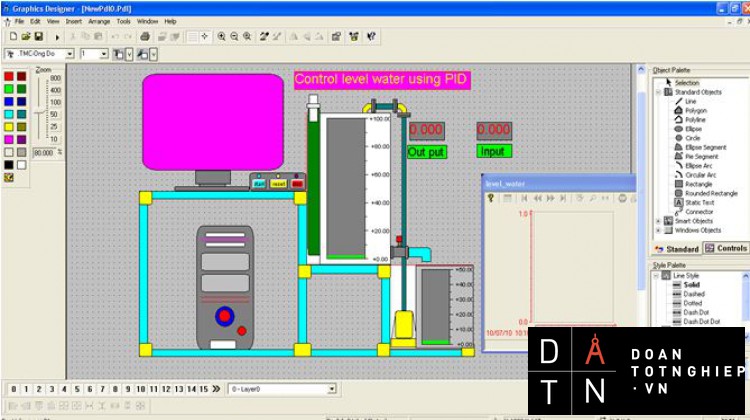
Hình 3.20: Mở Graphics Designer.......................................................................................... 33
Hình 3.21: Giao diện Graphics Designer.............................................................................. 33
Hình 3.22: Công cụ vẽ giao diện............................................................................................ 34
Hình 3.23: Thư viện hình mẫu................................................................................................ 34
Hình 3.24: Thiết lập I/O Field................................................................................................. 35
Hình 3.25: Thiết lập thanh Bar............................................................................................... 36
Hình 3.26: Thiết lập nút nhấn................................................................................................. 37
Hình 3.27: Giao diện mô hình................................................................................................. 38
Hình 4.1: Mô hình tổng quan của hệ thống........................................................................... 39
Hình 4.2: Sơ đồ khối của hệ thống......................................................................................... 40
Hình 4.3: Sơ đồ khối phương pháp trong phòng thí nghiệm............................................... 43
Hình 4.4: Đáp ứng nấc của hệ hở có dạng S.......................................................................... 44
Hình 4.5: Bảng xác định thông số PID................................................................................... 44
Hình 4.6: Đáp ứng nấc của hệ kín khi K = Kgh..................................................................... 46
Hình 4.7: Bảng xác định thông số PID................................................................................... 46
Hình 4.8: Thiết lập Kp,Ti......................................................................................................... 48
Hình 4.9: Thiết lập ngõ ra, thời gian lấy mẫu....................................................................... 48
Hình 4.10: Dạng ngõ ra của tín hiệu khi đặt là Kpcrit......................................................... 49
Hình 4.11: Bảng xác định thông số PID theo phương pháp thực nghiệm......................... 50
Hình 5.1: Giao diện WinCC.................................................................................................... 51
Hình 5.2: Mở Graphics Designer............................................................................................ 51
Hình 5.3: Giao diện Graphics Designer................................................................................. 52
Hình 5.4: Graphics hoạt động ở chế độ RunTime................................................................ 53
Hình 5.5: Dạng tín hiệu ngõ ra khi đặt giá trị là 15%.......................................................... 54
Hình 5.6: Dạng tín hiệu ngõ ra khi đặt giá trị là 20%.......................................................... 55
Hình 5.7: Dạng tín hiệu ngõ ra khi đặt giá trị là 30%.......................................................... 56
Hình 5.8: Dạng tín hiệu ngõ ra khi đặt giá trị là 45%.......................................................... 57
Hình 5.9: Dạng tín hiệu ngõ ra khi đặt nhiều giá trị............................................................ 58
CÁC KÝ HIỆU ĐƯỢC SỬ DỤNG TRONG ĐỀ TÀI
A: Mặt cắt ngang của bồn.
Cd: Hệ số chảy ra khỏi bồn.
g=9.8m/s2: Hằng số hấp dẫn.
h: Chiều cao của nước trong bồn.
Kp, Kl, K0 là các hệ số.
PLC: Programmable Logic Controler.
Q: Khoảng nước có sẵn trong bồn
Qin:Tốc độ của dòng nước chảy vào bồn
Qout: Tốc độ nước chảy ra khỏi bồn
Qp: Là tốc độ bơm.
Vp: Là điện áp đặt vào bơm.
V0: Là ngõ ra bộ khuyếch đại công suất.
Vi: Là điện áp ngõ vào của bộ khuyếch đại công suất,
Lời mở đầu
Việt Nam đang bước vào kỷ nguyên Tự Động Hóa & Hiện Đại Hóa hòa mình cùng thế giới để phát triển. Việc xây dựng các hệ thống điều khiển ứng dụng trong các quá trình công nghệ vào công nghiệp tự động hóa của nước nhà là điều vô cùng quan trọng. Trên cơ sở tiếp thu tri thức của nhân loại để phục vụ cho việc đi tắt, đón đầu là một vấn đề vô cùng cấp thiết. Đề tài hướng vào việc tìm hiểu và khám phá lĩnh vực điều khiển chính xác để phục vụ cho yêu cầu điều khiển thực tế.
Hệ thống điều khiển mức dùng giải thuật PID ứng dụng một trong những thuật toán điều khiển quá trình như : Điều khiển mức, điều khiển lưu lượng, điều khiển vận tốc, điều khiển vị trí. Việc ứng dụng giải thuật điều khiển chính xác này vào thực tế nhằm làm giảm sai số trong kết quả điều khiển.
Với việc chiếm tỷ lệ cao so với các giải thuật điều khiển khác (> 80%), giải thuật điều khiển PID chiếm một vị trí vô cùng quan trọng trong các giải thuật điều khiển dùng trong công nghiệp. Việc nghiên cứu, ứng dụng được thuật giải này làm mở ra cơ hội cho bản thân trong lĩnh vực điều khiển.
Tác giả:
NGUYỄN NGỌC NAM
CHƯƠNG 1: MỞ ĐẦU
1.1. Đặt vấn đề
Sự phát triển không ngừng của xã hội mà động lực chính là cuộc cách mạng về khoa học công nghệ đã tạo ra nhiều máy móc, thiết bị phục vụ cho con người. Nhu cầu của chúng ta là vô hạn nên máy móc cũng không ngừng phát triển để đáp ứng kịp nhu cầu đó.
Trong ngành công nghiệp tự động hóa, điều khiển thiết bị theo yêu cầu có sẵn, thiết bị được lập trình sẵn, thiết bị hoạt động dựa vào các tín hiệu phản hồi...ngày càng được áp dụng rộng rãi. Điều đó giúp giảm bớt sức lao động và tăng năng suất, chất lượng cho sản phẩm và bảo vệ sức khỏe của người lao động.
Hiện nay có rất nhiều cách điều khiển thiết bị như dùng vi mạch số, vi xử lí, vi điều khiển, PLC, điều khiển bằng máy tính, điều khiển thông minh…. Với nhiều phương pháp điều khiển khác nhau. Phương pháp điều khiển PID là phương pháp được sử dụng phổ biến nhất hiện nay và phương pháp điều khiển PID thỏa mãn khá tốt các yêu cầu thực tế đặt ra.
Trong bài nghiên cứu này, em quyết định tìm hiểu về phương pháp điều khiển bồn nước dùng giải thuật PID với mong muốn có thêm những kiến thức về điều khiển tự động nhằm phục vụ tốt hơn cho yêu cầu công việc sau này.
Tầm quan trọng của đề tài
Như đã trình bày ở trên, vấn đề điều khiển đối tượng chính xác là rất cần thiết trong sản xuất công nghiệp. Các thiết bị càng ngày càng hiện đại và kích thước cũng nhỏ hơn nên các thao tác trong quá trình sản xuất đòi hỏi độ chính xác cao. Một sai sót nhỏ có thể ảnh hưởng xấu đến toàn bộ sản phẩm. Do đó, ngày càng nhiều phương pháp điều khiển chính xác được nghiên cứu phát triển, và phương pháp điều khiển dùng giải thuật PID là một trong những sự lựa chọn đó.
Trong thực tế, vấn đề điều khiển mức chiếm một tỷ lệ rất lớn trong các lĩnh vực về dầu mỏ, hóa chất, công nghiệp thực phẩm,… khi thực hiện pha chế theo một tỷ lệ nhất định nào đó. Để điều khiển mức, có rất nhiều cách như đã chỉ ra ở trên. Trong đề tài này, em chủ yếu tập trung nghiên cứu điều khiển mức theo giải thuật PID.
Với đề tài trên, em thực hiện mong muốn nâng cao kiến thức trong lĩnh vực điều khiển tự động còn khá mới mẻ và nhiều thách thức. Đồng thời qua đó giúp bổ sung, hoàn thiện và vận dụng các kiến thức đã học trong nhà trường.
1.2. Mục đích nghiên cứu
Em thực hiện đề tài với mục đích sau:
- Củng cố và vận dụng kiến thức đã học: điện tử cơ bản, điện tử công suất, điều khiển tự động, PLC,… vào mô hình thực tế.
- Tìm hiểu về phương pháp điều khiển PID.
- Nâng cao khả năng thi công mô hình thực tế.
- Xây dựng một mô hình, trên cơ sở đó phát triển thành mô hình thí nghiệm cho sinh viên các khóa sau.
1.3. Đối tượng và phạm vi nghiên cứu
- Nghiên cứu mô hình điều khiển giám sát hệ thống bồn nước bằng máy tính.
- Thiết kế và thi công mô hình.
- Nghiên cứu giải thuật điều khiển PID.
- Lập trình điều khiển hệ thống.
1.4. Ý nghĩa khoa học
- Ứng dụng kết quả nghiên cứu lý thuyết vào thực tiễn.
- Đánh giá được sự ưu việt của giải thuật điều khiển PID.
1.5. Ý nghĩa thực tiển của đề tài nghiên cứu
- Ứng dụng kết quả nghiên cứu lý thuyết vào thực tiễn.
- Đánh giá được sự vượt trội của giải thuật điều khiển chính xác dựa trên mô hình điều khiển bồn nước.
1.6. Nhiệm vụ nghiên cứu
- Nghiên cứu việc xây dựng bộ điều khiển bồn nước sử dụng PLC S7-200.
- Nghiên cứu việc sử dụng WinCC trong điều khiển giám sát hệ thống bồn nước.
- Nghiên cứu truyền thông PPI trong việc truyền tín hiệu từ điều khiển bồn nước về nơi giám sát.
- Nghiên cứu việc điều khiển hệ thống bồn nước sử dụng bộ điều khiển kinh điển PID.
- Thi công.
- Lập trình điều khiển
1.7. Phương pháp nghiên cứu
- Xây dựng mô hình thực nghiệm.
- Sử dụng mô hình thực nghiệm để kiểm chứng lý thuyết đã được học.
1.8 Kết quả nghiên cứu
- Một mô hình điều khiển dùng PLC S7-200 và giám sát mức dùng phần mềm PC-Access và WinCC.
- Thuật toán điều khiển PID cho mô hình đối tượng mức.
- Chương trình điều khiển.
- Một cuốn báo cáo kết quả thực hiện đề tài.
CHƯƠNG 2: TỔNG QUAN MÔ HÌNH ĐIỀU KHIỂN MỨC
2.1. Xây dựng mô hình hệ thống điều khiển mức
2.1.1 Nguyên lý hoạt động của hệ thống
Hệ thống gồm 2 bồn (bồn trên và bồn dưới) đặt lệch nhau để tạo áp suất chảy. Bồn trên có một van điều khiển bằng tay để tạo nhiễu với lưu lượng khác nhau. Mức nước ở bồn trên được đo bằng một cảm biến siêu âm với ngõ ra analog. Nước được bơm vào bồn trên bằng một động cơ được điều khiển bằng bộ điều khiển PLC S7-200. Toàn bộ hệ thống được giám sát bằng phần mềm PC-Access và WinCC thông qua một máy tính được kết nối qua mạng PC/PPI.
Mức nước được đặt từ máy tính qua màn hình giao diện, sau đó hệ thống được cho phép hoạt động bằng nút nhấn Start từ mô hình hoặc nút nhấn Start từ màn hình. Hệ thống được điều khiển liên tục để đảm bảo mức nước bám theo liên tục giá trị đặt.
2.1.2Thiết kế các bộ phận trong hệ thống
- Phần đế của hệ thống:
Hình 2.1: Khung đế
Để đảm bảo tính thẩm mỹ, không rỉ, chắc chắn đỡ toàn bộ hai bồn nước. Phần đế được thiết kế bằng nhôm loại 1: kích thước 38*38mm. Các thanh nhôm được ghép nối với nhau thông qua tấm phíp.
- Bồn trên và bồn dưới :
Hai bồn có thể tích bằng nhau và được làm bằng vật liệu kính để dễ dàng quan sát mức nước trong bồn. Với kích thước D=30mm (chiều dài của bồn). R = 25 mm (chiều rộng của bồn ). H = 50 mm ( chiều cao của bồn ), do đó thể tích của bồn là :
V = D*R*H = 30*25*50 = 0.0375 m3 = 37.5 lit
Hình 2. 2: Lắp bồn vào hệ thống
- Bơm và ống dẫn trong mô hình.
Để điều khiển mức mước ở bồn trên, ta dùng bơm DC để bơm nước từ bồn dưới lên bồn trên. Trong hình sau là sơ đồ lắp đặt bơm trong mô hình.
Để dẫn nước, em cho chọn ống dẫn là ống nhựa PLC có đường kính là 21 mm.
Hình 2.3: Lắp bơm vào hệ thống
- Lắp đặt cảm biến đo mức :
Để đo mức mực nước trong bồn, em sử dụng cảm biến siêu âm. Hình sau là sơ đồ lắp đặt cảm biến siêu âm dùng trong hệ thống.
Hình 2.4: Lắp Cảm biến vào hệ thống
Cảm biến được đặt trong lồng ống nhựa PVC để tránh nhiễu từ bên ngoài và hạn chế việc dung dịch sóng sánh, làm ảnh hưởng đến kết quả đo.
- Lắp đặt mạng giám sát bằng máy tính:
Để giám sát và điều khiển mức trong hệ thống, em sử dụng kết hợp với máy tính và hai phần mềm : PC-Access và WinCC.
Thiết bị PLC S7-200 có chuẩn giao tiếp RS-485. Máy tính có các giao tiếp COM (RS-232), USB. Trong hệ thống, em sử dụng máy tính với giao tiếp RS-232 thông qua bộ chuyển đổi RS-232/RS-485 kết nối với chuẩn RS-485 của PLC thông qua giao thức PC/PPI.
Để phần mềm trên PLC và phần mềm WinCC trên máy tính có thể hiểu nhau, em sử dụng phần mềm PC-Access tạo sự liên thông giữa các biến (bit, byte, word) trong PLC với các Tag trong phần mềm WinCC.
Phần mềm WinCC dùng để tạo giao diện giám sát và điều khiển giữa máy với người dùng.
- Hệ thống hoàn chỉnh:
Hệ thống điều khiển mức hoàn chỉnh gồm:
- Khung đế để giữ bồn.
- Bơm được đặt trong bồn dưới và bơm lên bồn trên qua ống đường ống PVC. Hệ thống đường ống được nối dài xuống đáy bồn trên để giảm khả năng sóng của nước gây ra khi bơm làm nhiễu lên kết quả đo của hệ thống.
- Cảm biến siêu âm cho ngõ ra tuyến tính với mức nước trong bồn với điện áp thay đổi liên tục từ 0-10V. Cảm biến được đặt trong một ống PVC đường kính là 49mm nhằm để tránh sự sóng sánh của nước khi bơm, cho kết quả mức chính xác hơn. Để thoát khí khi nước dâng lên, hạ xuống trong ống, em đã khoan xung quanh ống nhiều lỗ thoát hơi phía trên.
- Máy tính kết hợp với hai phần mềm dùng để giám sát, theo dõi và điều khiển hệ thống. Hệ thống này có thể đựơc khởi động/dừng thông qua máy tính hoặc các nút nhấn Start/Stop ở hiện trường.
- Nguồn 24VDC cung cấp cho hệ thống.
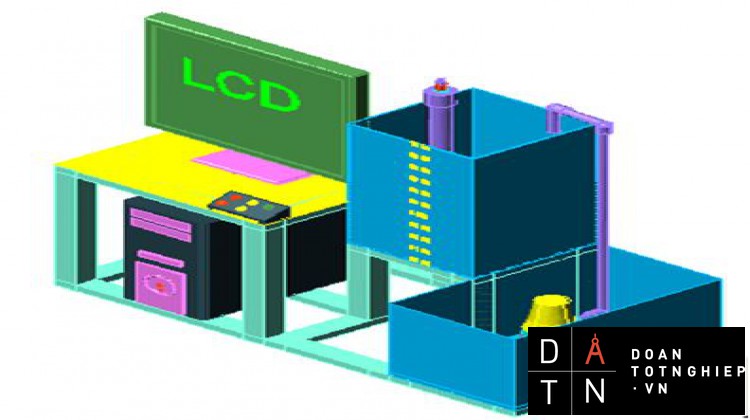
Hình 2.5: Hệ thống hoàn chỉnh (bản vẽ thiết kế trên AutoCad)
2.1.3. Mô hình hoàn chỉnh sau thi công.
Hình 2. 6: Mô hình thiết kế thực tế
2.2. Hệ thống điều khiển
2.2.1. Bộ điều khiển PLC S7-200
2.2.1.1. Programmable Logic Controllers
PLC viết tắt của chữ Programmable Logic Controller, là thiết bị khả trình cho phép thực hiện linh hoạt các thuật toán điều khiển logic thông qua ngôn ngữ lập trình. Người sử dụng có thể lập trình để thực hiện một loạt các sự kiện theo trình tự của vòng quét. Các sự kiện này được các cảm biến đưa vào PLC hoặc qua bộ định thời (Timer) hay các Counter. PLC có những ưu điểm sau:
- Lập trình dễ dàng, ngôn ngữ lập trình dễ học
- Gọn nhẹ, dễ dàng bảo quản sửa chữa
- Dung lượng bộ nhớ lớn có thể chứa được những chương trình phức tạp
- Hoàn toàn tin cậy trong môi trường công nghiệp
- Giao tiếp được với các thiết bị thông minh như: máy tính, máy in, các thiết bị điều khiển, các modul mở rộng và chính các thiết bị PLC khác.
- Giá cả có thể cạnh tranh
Các thiết kế đầu tiên là nhằm thay thế cho các phần cứng Relay, dây nối và các Timer. Qua quá trình phát triển, các tập lệnh nhanh chóng đi từ lệnh logic đơn giản đến các lệnh đếm, định thời, các lệnh di chuyển thanh ghi, các lệnh số học… Các PLC hiện đại có dung lượng bộ nhớ và số lượng ngõ vào ra nhiều hơn.
Hình 2.7: Cấu trúc cơ bản của một bộ điều khiển[1-trang5]
2.2.1.2. CPU 224XP
|
|
Hình 2.8: Đặc tính của CPU 224XP[2-trang396]
Ngõ vào đấu dây theo kiểu Sink hoặc Soure
- Khi áp đầu vào là 24VDC thì dòng là 4mA
Hình 2.9: Đặc tính ngõ vào số của CPU 224XP[2-Trang 397]
Phạm vi điện áp:
- 5 – 28.8 VDC cho Q0.0 đến Q0.4 Và 20.4 – 28.8 cho Q0.5 đến Q1.1
Hình 2.10: Đặc tính ngõ ra số của CPU 224XP[2-trang398]
Đặc tính ngõ vào Analog
- Điện áp ngõ vào ± 10 V
- Dãy dữ liệu word -32000 đến 32000
Hình 2.11 : Đặc tính ngõ vào Analog của CPU 224XP[2-trang 399]
Đặc tính ngõ ra Analog
- Số ngõ ra là 1
- Điện áp là từ 0 đến 10V
- Dòng từ 0 đến 20mA
- Dữ liệu dạng Word từ 0 – 32000
Hình 2.12 : Đặc tính ngõ ra Analog của CPU 224XP[2-trang399]
Sơ đồ kết nối chân:
PLC 224XP có nguồn cấp vào là 24VDC tại chân L+ và M Power, và xuất nguồn ra là 24VDC tại ngõ ra Output.
Ngõ vào/ ra Analog:
-
Ngõ vào Analog
- Chân M đấu với Mass
- Chân A nối áp ngõ vào
- Chân B nối dòng ngõ vào
- Ngõ ra Analog
- Chân I khi ngõ ra là dòng
- Chân V khi ngõ ra là áp
Hình 2.13 : Sơ đồ kết nối của CPU 224XP[2-trang402]
2.2.2. Cảm biến đo mức.
Để đo mức thay đổi liên tục, người ta có thể sử dụng rất nhiều cách. Ta có thể liệt kê một số cách như sau :
-
Đo mức dùng điện trở.
- Ưu điểm : đơn giản, rể xử dụng, rẻ
- Nhược điểm: chỉ đo được khoảng cách ngắn.
-
Đo mức dùng thông qua dò sự thay đổi giá trị điện dung tiếp xúc giữa cảm biến và mức chất lỏng bên ngoài.
- Ưu điểm.: đáp ứng rất tốt các yêu cầu đặt ra để đo khoảng cách
- Nhược điểm: chi phí rất lớn khoảng 12000.000 Việt Nam đồng/1con
- Đo mức dùng cảm biến siêu âm.
Trong đề tài, em sử dụng cảm biến siêu âm.
2.2.2.1. Cảm biến siêu âm
Loại cảm biến này phát ra xung siêu âm. Nếu tồn tại vật thể trong vùng làm việc của cảm biến sẽ xuất hiện sóng phản xạ về đầu thu. Cấu trúc của một cảm biến siêu âm thường được mô tả như sau:
Hình 2.14: Các thành phần cấu tạo bên trong cảm biến siêu âm[5]
Phần tử cơ bản của loại cảm biến này là bộ biến âm thường là một thạch anh tạo dao động được bảo vệ bằng một chất nhựa tổng hợp nhằm chống lại sự ẩm ướt, bụi bẩn và các nhân tố khác của môi trường. Bộ thu âm thanh sẽ hứng âm đưa tới bộ biến đổi âm thanh thành tín hiệu điện. Tất cả các thành phần này để trong một vỏ.
Cơ sở lý thuyết cảm biến siêu âm
Sóng âm là những sóng cơ truyền trong các môi trường khí, lỏng, rắn. Sóng âm thanh di chuyển với vận tốc thay đổi theo nhiệt độ và áp suất của môi trường. Tại nhiệt độ và áp suất tiêu chuẩn v = 300 m /s.
Hình 2.15: Cảm biến siêu âm[3-trang560]
Thông số đặc trưng của cảm biến siêu âm Unam 18:
Hình 2.16 : Thông số đặc tính của cảm biến[3-trang590]
- Phạm vi cài đặt: từ 100…700 mm
- Phạm vi hoạt động: 110.. 700 mm
- Điện áp cung cấp : 12.. 30 VDC
- Dòng tiêu thụ max : 30 mA
- Dòng ngõ ra: < 200 mA
- Tín hiệu ngõ ra được báo hiệu bằng đèn Led
- Tần số sóng âm 230 KHz
- Cấp bảo vệ IP 67
Kích thước cảm biến siêu âm UNam 18 :
- Đường kính thân Sensor là 18 mm
- Đường kính ốc gắn ngoài là 24 mm
- Chiều dài thân Sensor 78 mm
- Chiều dài cả Sensor là 89 mm
- Trên thân Sensor còn có Led báo hiệu trạng thái và Buton Teach- In
Hình 2.17: Thông số kích thước của cảm biến[3-trang590]
Sơ đồ kết nối chân cảm biến:
- BN(1): nối nguồn 24VDC
- BK(4): chân ngõ ra
- BU(3): chân nối Mass
- WH(2): chân nối nguồn dương 24VDC dùng để điều khiển cảm biến
Hình 2.18 : Sơ đồ kết nối của cảm biến[3-trang590]
Teach-In sensor
- B1 : Nhấn nút cho đến khi đèn chớp tắt 2 màu qua lại
- B2 : Buông nút, đèn chớp tắt màu đỏà đổ nước vào đầy.
- B3 : Nhấn nút, buông nút, đèn chớp tắt màu vàngà tháo cạn nước.
- B4 : Nhấn nút, cả 2 đèn sáng để hoàn tất quá trình.
Với cách thiết lập này, mực nước cao tương ứng với 0V, mực nước thấp tương ứng với 10V.
Thiết lập ngược lại ở bước 2 và b ước 3 sẽ thay đổi mức cao tương ứng 10V, mức thấp tương ứng với 0V
Hình 2.19 : Sơ đồ Teach- In[3-trang598]
Góc búp của cảm biến:
Với mỗi cảm biến siêu âm khác nhau thì có góc búp khác nhau. Tùy từng mục đích sử dụng khác nhau mà ta chọn loại cảm biến siêu âm có góc búp khác nhau.
Ở đây ta chọn loại cảm biến có góc búp nhỏ nhằm đáp ứng được yêu cầu đo mức nước trong bồn.
Hình 2.20: Sơ đồ góc chiết của cảm biến[3-trang590]
2.2.3. Khối nguồn
2.2.3.1. Bộ nguồn
Khối nguồn cung cấp nguồn cho toàn bộ hệ thống. Để thiết kế mạch nguồn, em dùng chương trình Orcad 9.2 để thiết kế mạch. Mạch nguồn được thiết kế như sau:
Hình 2.21 : Mạch nguồn 24V
Nguyên lý hoạt động : Nguồn 220VAC qua bộ biến áp 10A và cho đầu ra là 24VAC. Đầu ra 24VAC qua Diode cầu 35A cho nguồn một chiều ở ngõ ra. Nguồn một chiều được đi qua hai tụ, tụ có tác dụng làm cho phẳng điện áp và đi vào chân 2 của IC 7824. Vì nguồn cần là 2.5-3A nên ta mắc thêm IC D718 để chịu dòng cho 7824. Nguồn lấy ra cung cấp cho PLC và các thiết bị chấp hành.
- Trong mạch nguồn 24V này Diode cầu đóng vai trò chỉnh lưu từ điện xoay chiều (AC) sang điện một chiều (DC).
- U1 – IC ổn áp LM 7824 tạo điện áp chuẩn 24V.
- Tụ C1 dùng lọc tần số thấp để tạo ra nguồn DC tương đối phẳng.
- Tụ C2 dùng để lọc tần số cao để chống nhiễu cho mạch nguồn.
- Điện trở R1 có giá trị là 1k để phân cực cho LED báo nguồn.
- LED D1 dùng để báo nguồn
2.2.3.2. Bộ khuyếch đại công suất
Khối công suất dùng để khuếch đại công suất tín hiệu từ ngõ ra PWM của PLC cấp điều khiển động cơ DC, và qua hai điện trở 2.2k để phân áp.
Nguyên lý hoạt động : Nguồn dương Vcc = 24VDC được nối với chân dương của động cơ ( chân 2 của J2) , chân còn lại của động cơ ( chân âm) được nối với chân 3 của J2.
Hình 2.22 : Khối khuếch đại công suất.
Khi PLC cấp xung dương, điện áp qua điện trở R = 2.2k sẽ kích cho IRF 540 hoạt động, IRF hoạt động thì từ nguồn dương Vcc qua động cơ, đi qua FET và về Mass, làm cho động cơ hoạt động. Khi ta không cấp xung cho PLC thì FET ngắt và làm cho động cơ dừng.
- IC IRF540 là IC dùng để kích xung
- Diode D4 dùng để bảo vệ FET, chống dòng điện dội ngược về khi đóng ngắt.
Mạch nguồn thực tế:
Hình 2.23: Mạch nguồn 24V thực tế
2.2.4 .Thiết bị chấp hành
2.2.4 .1.Bơm
Ta dùng loại bơm chìm đặt trong bể, do đó nó được làm mát ngay cả khi hệ thống hoạt động.
Kích thước nhỏ gọn, nhẹ, rất dễ mang, di chuyển khi cần thiết.
Để điều khiển mức nước trong bồn ta dùng bơm DC có nguồn là 24VDC và áp là 2.5 A.
Lưu lượng bơm là 70m3/h.
Chiều cao cột nước bơm 2m.
CHƯƠNG III: WINCC-PHẦM MỀM GIÁM SÁT HỆ THỐNG
III.1. Phần mềm PC-Access
Để giám sát và điều khiển hệ thống ta dùng WinCC. Vì WinCC không bắt tay trực tiếp với S7-200 nên ta dùng phần mềm PC-Access. PC-Access giúp WinCC và S7-200 có thể hiểu và giao tiếp được với nhau.
Mở phần mềm PC-Access: vào Start\Simatic\S7-200 PC access V.1.0.0.56\S7-200 PC-Access
Hình 3.1: Mở PC-Access
Sau khi bấm chọn, màn hình xuất hiện giao diện :
Hình 3.2 : Giao diện PC-Access
Sau đó ta thêm PLC vào trong từng hệ thống bằng cách Click chuột phải vào Microwin và chọn new PLC. Mỗi trạm được phân biệt với nhau bằng địa chỉ PLC
Hình 3.3 : Thiết lập PLC
Chọn tên PLC và địa chỉ tương ứng.
Để đặt tên cho PLC được kết nối, chọn New PLC, chọn chuột phải, chọn Rename.
Hình 3.4 : Đặt tên cho PLC
Số lượng PLC có thể tới 126 do vậy ta có thể tạo tối đa 126 trạm, trạm có địa chỉ từ 1-126 thông qua mạng RS485. Tương tự ta có thể tạo các trạm khác tương ứng nhưng ta phải định địa chỉ mới cho các trạm tương ứng này cho phù hợp.
Tạo Tag cho từng trạm tương ứng bằng cách Click chuột phải vào trạm cần tạo Tag rồi chọn New Forder : nếu muốn tạo một Tag trong một trạm.
Item : nếu muốn tạo ra một Tag riêng rẽ
................................
- Trong đó Đối tượng điều khiển trong hệ thống bao gồm : Mạch khuyếch đại công suất, bơm, hệ bồn.
- Thành phần cảm biến hồi tiếp tín hiệu mức ở bồn về bộ điều khiển có G(s)=1.
- Giá trị đặt được cấp vào cho mô hình điều khiển qua màn hình giao diện.
Phân biệt giữa phương pháp điều khiển trong phòng thí nghiệm và phương pháp thực nghiệm.
Phương pháp trong phòng thí nghiệm : Mô hình toán học của đối tượng được tính toán dựa trên việc đo các thông số như thể tích bình, mức nước, lưu lượng dòng chảy,… Sau khi có mô hình toán học, người ta sử dụng các phương pháp như giải tích, quỹ đạo nghiệm số, giản đồ Bode,.. để thiết kế bộ điều khiển do bản chất bộ điều khiển PID là bộ điều khiển sớm trễ pha.
Phương pháp thực nghiệm : Mô hình toán học và bộ điều khiển được xác định bằng phương pháp thực nghiệm (dựa trên thực nghiệm, suy ra). Lúc này, người ta không cần quan tâm đến các thông số như đã chỉ ra trong phương pháp điều khiển trong phòng thí nghiệm. Đối tượng được điều khiển lúc này được coi là một hộp đen, người ta lần lượt cấp tín hiệu điều khiển ở ngõ vào, sử dụng thiết bị quan sát kết quả ngõ ra (thường là đáp ứng thời gian). Dựa trên đáp ứng thời gian đó, sử dụng một số các phương pháp thực nghiệm như Ziegler Nichols, …. Để xác định mô hình toán và Bộ điều khiển.
IV.1. Phương pháp trong phòng thí nghiệm[4]
Hệ thống có dạng bậc nhất, trong đó chất lỏng được chảy vào và chảy ra khỏi bồn. Tùy thuộc vào mực nước cân bằng, trong đó Qin là tốc độ của nước chảy vào bồn, Q là khoảng nước có sẵn trong bồn và Qout là tốc độ dòng chảy của nước ra khỏi bồn. Nếu A là mặt cắt ngang của bồn và h là chiều cao của nước trong bồn, hệ thống trên có thể viết :
Tốc độ của dòng chảy ra khỏi bồn tùy thuộc vào hệ số chảy ra của bồn, chiều cao của mực nước trong bồn, hằng số hấp dẫn, tiết diện của vòi chảy ra, vì thế :
Trong đó
Cd là hệ số chảy ra của bồn.
a diện tích bề mặt van xả
g = 9.8m/s2
Phương trình trên mô tả một mối quan hệ không tuyến tính giữa tốc độ dòng chảy và chiều cao của nước trong bồn. Ta có thể tuyến tính hóa từng đoạn hoạt động của nó.
Trong đó
Qin tốc độ nước chảy vào bồn
Qout = Q0
h0 : Chiều cao của mực nước
Xét trên từng đoạn nhỏ, ta có :
và
Kết hợp những công thức trên, ta có :
Phương trình có thể tuyến tính hóa dùng chuỗi Taylor và lấy thành phần đầu
Lấy thành phần đầu,
Hoặc
Hay nói cách khác, tuyến tính hóa
Sẽ được
Thực hiện biến đổi Laplace, ta được hệ thống bậc nhất:
Bơm, cảm biến mức và bộ khuyếch đại nguồn là những phần tử đơn giản với độ lợi tỷ lệ và hệ thống không có thành phần động. Mối liên hệ giữa ngõ vào và ngõ ra có thể viết như sau :
Đối với bơm
Qp = Kp.Vp
Cảm biến mức,
Vl = Kl.h
Bộ khuyếch đại nguồn,
V0 = K0.Vi
Trong đó
Qp là tốc độ bơm.
Vp là điện áp đặt vào bơm.
V0 là ngõ ra bộ khuyếch đại công suất.
Và Vi là điện áp ngõ vào của bộ khuyếch đại công suất,
Kp, Kl, K0 là các hệ số
Sơ đồ khối hệ thống có dạng :
Hình 4.3: Sơ đồ khối phương pháp trong phòng thí nghiệm
Phương pháp trong phòng thí nghiệm rất khó thực hiện chính xác khi ta xác định các thông số ở trên để xây dựng thuật toán nên trên thực tế ta ít dùng.
IV.2. Phương pháp thực nghiệm Ziegler Nichols
Phương pháp Zeigler-Nichols là phương pháp thực nghiệm để thiết kế bộ điều khiển P, PI, hoặc PID bằng cách dựa vào đáp ứng quá độ của đối tượng điều khiển. Bộ điều khiển PID cần thiết kế có hàm truyền là:
Zeigler và Nichols đưa ra hai cách chọn thông số bộ điều khiển PID tùy theo đặc điểm của đối tượng.
Cách 1: Dựa vào đáp ứng quá độ của hệ hở, áp dụng cho các đối tượng có đáp ứng đối với tín hiệu vào là hàm nấc có dạng chữ S như hình 4.4, ví dụ như nhiệt độ lò nhiệt, tốc độ động cơ, …
Hình 4.4: Đáp ứng nấc của hệ hở có dạng S
Thông số bộ điều khiển P, PI, PID được chọn như sau:
|
Thông số
Bộ đk |
Kp |
Ti |
Td |
|
P |
T2/(T1.k) |
∞ |
0 |
|
PI |
0.9T2/(T1.k) |
T1/0.3 |
0 |
|
PID |
1.2T2/(T1.k) |
2T1 |
0.5T1 |
Hình 4.5: Bảng xác định thông số PID
Ví dụ: Hãy thiết kế bộ điều khiển PID điều khiển nhiệt đô của lò sấy, biết đặc tính quá độ của lò sấy thu được từ thực nghiệm có dạng như sau:
Giải. Dựa vào đáp ứng quá độ thực nghiệm ta có:
T1 = 8 min = 480 sec
T2 = 24 min = 1440sec
Chọn thông số bộ điều khiển PID theo phương pháp Ziegler-Nichols
Ti=2T1=2x480=960sec
Td=0,5T1=0,5x480=240sec
Do đó:
Cách 2: Dựa vào đáp ứng quá độ của hệ kín, áp dụng cho các đối tượng có khâu tích phân lý tưởng, ví dụ như mực chất lỏng trong bồn chứa, vị trí hệ truyền động dùng động cơ,... Đáp ứng quá độ (hệ hở) của các đối tượng có khâu tích phân lý tưởng không có dạng như hình trên mà tăng đến vô cùng. Đối với các đối tượng thuộc loại này ta chọn thông số bộ điều khiển PID dựa vào đáp ứng quá độ của hệ kín như hình sau. Tăng dần hệ số khuếch đại K của hệ kín ở hình sau đến giá trị giới hạn Kgh, khi đó đáp ứng ra của hệ kín ở trạng thái xác lập là dao động ổn định với chu kỳ Tgh.
Hình 4.6: Đáp ứng nấc của hệ kín khi K = Kgh
Thông số bộ điều khiển P, PI, PID được chọn như sau:
|
Thông số
Bộ đk |
Kp |
Ti |
Td |
|
P |
0.5 Kgh |
∞ |
0 |
|
PI |
0.45Kgh |
0.83Tgh |
0 |
|
PID |
0.6Kgh |
0.5Tgh |
0.125Tgh |
Hình 47: Bảng xác định thông số PID
Ví dụ: hãy thiết kế bộ điều khiển PID điều khiển vị trí góc quay của động cơ DC, biết rằng nếu sử dụng bộ điều khiển tỉ lệ thì bằng thực nghiệm ta xác định được khi K=20 vị trí góc quay động cơ ở trạng thái xác lập là dao động với chu kỳ T=1sec
Giải: Theo dữ liệu của bài toán, ta có: Kgh = 20, Tgh = 1sec
Chọn thông số bộ điều khiển PID theo Ziegler-Nichols:
Kp=0.6Kgh=0,6x20=12
TI=0,5Tgh=0,5x1=0,5sec
TD=0,125Tgh=0,125x1=0,125sec
Do đó:
- Đối tượng điều khiển:
Đối tượng điều khiển là vận tốc động cơ DC. Ta đã biết vận tốc động cơ DC phụ thuộc vào dòng điện hay điện áp mà ta cấp cho (dĩ nhiên phải nằm trong khoảng cho phép của động cơ). Cụ thể ở đây ta sử dụng động cơ 24VDC, do đó điện áp cấp không được vượt quá 24V. Tuy nhiên việc cấp áp cho động cơ trong một khoảng rộng từ 0 đến 24V là khó khăn.
Do đó ta điều khiển tốc độ theo xung PWM (Pulse width Modulation), cụ thể là Duty Cycle.
Vậy các ngõ vào và ra của bộ điều khiển PID như sau:
- Ngõ vào: e = vận tốc hiện đại – vận tốc thiết lập
- Ngõ ra: U = % duty cycle
Phụ thuộc giữa %duty và vận tốc được gần như tuyến tính nên để đơn giản, ta giả sử nó hoàn toàn tuyến tính. Vậy, ta có thể điều khiển vận tốc được thông qua %duty
Xác định các thông số cho giải thuật điều khiển bằng phương pháp 2.
Với giá trị thời gian lấy mẫu là 0.1s vào ô Sample Timer. Đặt giá trị Kp từ 0.1 vào ô Gain. Khoảng đặt thấp nhất là 0.0, khoảng đặt cao nhất là 100.0 (chú ý : đơn vị đặt dạng phần trăm). Thời gian tích phân 0.00 vào Intergral Time. Thời gian vi phân 0.00 vào Derivative Time.
Hình 4.8: Thiết lập Kp,Ti
Chọn Next để tiếp tục, màn hình xuất hiện thiết lập cho ngõ ra của bộ điều khiển PID. Chọn Output Type là Digital, Duty Cycle Time là 0.1
Hình 4.9: Thiết lập ngõ ra, thời gian lấy mẫu
Hoàn tất quá trình thiết lập và viết đoạn chương trình sau vào Main :
Thực hiện quan sát tín hiệu ngõ ra được hiển thị trên màn hình máy tính thông qua phần mềm WinCC.
Thay đổi giá trị Kp cho đến khi màn hình xuất hiện dao động như hình sau :
Hình 4.10: dạng ngõ ra của tín hiệu khi đặt là Kpcrit
Ở đây, bằng thực nghiệm em xác định được với Kpcrit bằng 2.4, hệ dao động và xác định được T=2s (Chú ý : Van phải được mở lưu lượng lớn nhất khi thực hiện khảo sát)
Với giá trị Kpcrit xác định được là 2.4 . Ta tìm được T = 2S
Xác định thông số của bộ điều chỉnh theo bảng sau:
|
Bộ điều chỉnh |
Kp |
TI |
TD |
|
P |
0.5Kpcrit |
|
|
|
PI |
0.45Kpcrit |
0.83T |
|
|
PID |
0.6Kpcrit |
0.5T |
0.125T |
Hình 4.11: Bảng xác định thông số PID theo phương pháp thực nghiệm
Dựa vào bảng xác định thông số PID của Zieler – Nichols ta xác định được Kp:
Kp = 0.5x Kpcrit = 0.5x2.4 = 1.2
Và Tn là:
Tn = 0.83xT = 0.83x2 = 1.66 sec
Do đó hàm truyền của hệ thống ổn định mức sẽ là:
CHƯƠNG 5: KẾT QUẢ
5.1. Cách thiết lập giá trị.
Mở giao diện WinCC: Giao diện WinCC sẽ như hình sau:
Hình 5.1: Giao diện WinCC
Sau đó ta Double Click vào mục Graphics Designer
Hình 5.2: Mở Graphics Designer
Tiếp tục Double Click vào Pdlo. Để mở giao diện Graphics Designer ra
Chờ đợi trong giây lát. Màn hình Graphics Designer xuất hiện như hình sau:
Hình 5.3: Giao diện Graphics Designer
Trên thanh Menu ta nhấn nút Save
Rồi nhấn nút Run
Chờ đợi trong giây lát ta sẽ có màn hình giao diện như hình bên dưới:
Hình 5.4: Graphics hoạt động ở chế độ RunTime
Sau khi màn hình Graphics Designer xuất hiện ta thiết lập các giá trị như sau:
Bước 1: Ta nhập giá trị cần đặt vào ô Input
Bước 2: Nhấn nút Start trên bộ điều khiển.
Quan sát hệ thống hoạt động trong ô Output hoặc có thể xem dạng đồ thị ngõ ra
Khi muốn thay đổi giá trị đặt ta làm như sau:
Bước 3: Nhấn nút Stop
Bước 4: Quay lại bước 1
5.2. Kết quả thực nghiệm:
Đây là kết quả mô phỏng của hệ thống điều khiển mức thông qua phần mềm giám sát WinCC 6.0
Nhận xét: tín hiệu ngõ ra đạt ổn định trong khoảng thời gian 1.5s.
Kết quả thực nghiệm ở giá trị 15 % mực nước của bồn:
Hình 5.5: Dạng tín hiệu ngõ ra khi đặt giá trị là 15%
Kết quả thực nghiệm ở giá trị 20 % mực nước của bồn:
Hình 5.6: Dạng tín hiệu ngõ ra khi đặt giá trị là 20%
Kết quả thực nghiệm ở giá trị 30 % mực nước của bồn:
Hình 5.7: Dạng tín hiệu ngõ ra khi đặt giá trị là 30%
Kết quả thực nghiệm ở giá trị 45 % mực nước của bồn:
Hình 5.8: Dạng tín hiệu ngõ ra khi đặt giá trị là 45%
Kết quả thực nghiệm với nhiều giá trị mực nước của bồn:
Hình 5.9: Dạng tín hiệu ngõ ra khi đặt nhiều giá trị
TÀI LIỆU THAM KHẢO
[1] Nguyễn thị phương Hà, Huỳnh thái Hoàng – Cơ sở điều khiển tự động
[2] Nguyễn Vũ Quỳnh – Giáo trình Programmable Logic Controller
[3] SIEMENS-S7-200 Programmable Controller System Manual
[4] Ultrasonic
100 MB Bao gồm tất cả file step, file Orcad..ASM, HEX file mô phỏng DSN.OPJ MAX... thuyết minh, HỆ THỐNG ĐIỀU KHIỂN MỨC DÙNG GIẢI THUẬT PID TRONG S7-200, THIẾT KẾ THI CÔNG HỆ THỐNG, ĐIỀU KHIỂN MỨC DÙNG GIẢI THUẬT, PID TRONG S7-200