THIẾT KẾ VÀ CHẾ TẠO ĐẦU PHÂN ĐỘ MÁY PHAY






NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO ĐẦU PHÂN ĐỘ MÁY PHAY, thuyết minh, động học máy, kết cấu máy, nguyên lý đầu phân độ, quy trình sản xuất, NGHIÊN CỨU THIẾT KẾ CHẾ TẠO MÁY , ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ
Chương I
TỔNG QUAN VỀ CƠ CẤU VI SAI
I. Hệ thống bánh răng
1. Đại cương
1.1. Công dụng của hệ thống bánh răng
Hệ thống bánh răng có thể truyền chuyển động quay với tỉ số truyền lớn. Một cặp bánh răng thường chỉ truyền với tỉ số truyền nhỏ. Nhưng trong thực tế cần phải có những cơ cấu thực hiện tỉ số truyền lớn. Lúc đó cần phải dùng hệ thống nhiều cặp bánh răng.

Hệ thồng bánh răng dùng để thay đổi tỉ số truyền. Trong một số máy cần phải thay đổi tộc độ khi làm việc (hộp số trong máy, trong ô tô…).
Trên hình 1.1a là sơ đồ của hộp số. Trục I có 3 bánh răng gắn chặt lên trục. Trục II có 1 khối di trượt gồm 3 bánh răng. Khối này di trượt trên trục II, có thể lần lượt tiếp xúc với 3 bánh răng trên. Chuyển động quay được truyền từ trục I sang trục II với 3 tỉ số truyền khác nhau.
Hệ thống bánh răng dùng để thay đổi chiều quay. Khi bánh răng 1 ăn khớp với bánh răng 2 hoặc 2’, tỉ số truyền từ trục I đền trục II sẽ đổi dấu.
Vì vậy, nếu trục I có chiều quay nhất định, thì trục II có thể quay 2 chiều,
tuỳ theo vị trì tay gạt A (hình 1.1b).
Hệ thống bánh răng dùng để hợp chuyển động và phân tích chuyển động.
1.2. Phân loại hệ thống bánh răng
Hệ bánh răng thường (hình 1.1)
Trong hệ bánh răng thường, đường tâm của các trục bánh răng là cố định.
Hệ bánh răng ngoại luân: trên hình 1.2 là hệ bánh răng ngoại luân, đường tâm của trục bánh răng 2 di động quanh tâm O.
Tên của các khâu:
khâu 1 bánh răng trung tâm.
khâu 2 bánh răng vệ tinh.
khâu C cần.
Hệ bánh răng ngoại luân được chia thành:
+ Hệ thống vi sai:
Hệ thống vi sai là hệ bánh răng ngoại luân, trong đó không có bánh răng ngoại luân nào cả.
Bậc tự do của hệ thống vi sai: cơ cấu hình 3 gồm 3 khâu động, 3 khớp loại 5, 1 khớp loại 4. Vì vậy: W = 3n – (2p5 + p4) =2.
Cơ cấu có thể nhận 2 quy luật chuyển động (2 khâu dẫn). Cơ cấu vi sai có thể hợp 2 chuyển động, hoặc phân tích thành 2 chuyển động thành phần.

+ Hệ thống hành tinh:
Là hệ thống hành tinh trong đó có bánh trung tâm. Cơ cấu trên hình 2 nếu bánh răng 1 cố định, được hệ thống hành tinh.
Khi đó: n = 2; P5 = 2
P4 = 1
Bậc tự do của cơ cấu hành tinh: W = 1.

+ Hệ thống vi sai kín:
Trong hệ thống vi sai kín có thêm 1 xích truyền động bánh răng khác, nối từ bánh trung tâm này với bánh trung tâm kia hoặc với cần. Xích truyền động này có thể là một hệ bánh răng thường, hoặc 1 hệ bánh răng hành tinh, hoặc 1 hệ hỗn hợp. Như vậy, chuyển động của các bánh trung tâm với cần phụ thuộc lẫn nhau, làm giảm bậc tự do của cơ cấu vi sai. Vì vậy hệ vi sai kín có 1 bậc tự do (hình 1.3). Bánh trung tâm 1 nối với bánh trung tâm 3 bằng hệ thống bánh răng thường 1’ – 4’ – 4 – 3’.

N =5; P5 = 5
P4 = 4
Vậy: W = 1
Thí dụ trên hình 1.4a, các bánh răng 1 và 3 đặt trong các gối đỡ I và III sẽ quay với vận tốc góc . Trục quay của hai bánh 1 và 3 nằm trên cùng một đường thẳng (mặc dù giữa 2 bánh răng này không có liên hệ trực tiếp). Cần dẫn C cũng quay quanh trục hình học của các bánh răng 1 và 3 với vận tốc góc và mang gối đỡ II (gối đỡ di động). Trục của hai bánh răng 2 và 2’ quay tự do trong gối đỡ này. Như vậy, chuyển động của bánh răng 2 và 2’ gồm 2 chuyển động: quay quanh trục của nó và cùng với cần dẫn C quay quanh trục của các bánh răng 1 và 3.
Chuyển động của các bánh răng 2 và 2’ gần giống như chuyển động của các hành tinh, nên cơ cấu được xét là cơ cấu hành tinh. Các cơ cấu bánh răng dù chỉ có trục hình học của một bánh răng di động đều được gọi là cơ cấu hành tinh. Các bánh răng chỉ quay quanh trục cố định trung tâm (bánh răng 1 và 3) là các bánh răng trung tâm, các bánh răng có trục hình học di động (bánh răng 2 và 2’) gọi là bánh răng vệ tinh. Trong cơ cấu hành tinh trên có số khâu n = 5, số khớp động loại 5 (các khớp quay) P5=4, số khớp động loại 4 (khớp cao giữa các răng) P4=2. Số bậc tự do của cơ cấu:..............................................
III. Bánh răng vi sai quay cơ bản
Trong sơ đồ hinh 1.4, sự ăn khớp giữa các bánh răng được biểu diễn bởi tiếp tuyến của các vòng tròn. Trong trường hợp này bánh răng truyền phải là bánh răng côn với góc nghiêng 450. Chú ý rằng từ khi ba đĩa được sắp xếp với nhau, trục của đĩa màu xanh da trời phải được lăp xuyên qua một trong những trục của đĩa phía ngoài. Như vậy, một thiết bị mà sử dụng kết hợp vài bánh răng truyền, gọi là bánh răng côn vi sai đơn giản.
Cơ cấu này là một trường hợp của cơ cấu vi sai theo đường thẳng nếu ta tưởng tượng như gấp thanh răng màu tía và màu xanh lá cây lại và cuốn nó vào các bánh răng giống nhau, và ”slider” gấp lên một cái đĩa với cùng bán kính, giờ đây bánh răng truyền được gắn vào một điểm thuộc chu vi của nó. Chúng ta có thể đo chiều quay theo chiều kim đồng hồ là chiều dương. Trong sự biểu diễn này, những thanh răng chuyển động sang phải. Từ đó ba vòng tròn có cùng một bán kính, tốc độ quay của nó là a (trên), b (dưới) và c (đĩa màu xanh trung tâm) phải thỏa mãn: c = (a + b)/2.
IV. Hệ vi sai trong cơ cấu Antikythera
Cơ cấu Antikythera được xem như là một cỗ máy tính thiên văn cổ nhất thế giới, được phát hiện vào năm 1900 trong một chiếc tàu đắm miền duyên hải của Antikythera, một hòn đảo giữa Cret và Hy lạp. Một vài chứng cứ cho thấy nó được chế tạo khoảng từ 100 -150 trước công nguyên. Thiết bị được làm bằng những bánh răng bằng đồng được lắp trong một cái khung gỗ hình chữ nhật. Và toàn bộ cỗ máy này được vận hành bằng tay.
Các nhà nghiên cứu cho rằng đây là một thiết bị phức tạp hơn bất cứ một thiết bị kỹ thuật nào sau nó một thiên niên kỷ. Trong chiếc hộp này chứa 32 bánh răng được lắp ráp thành một cỗ máy mô phỏng chính xác chuyển động của mặt trời và mặt trăng tương phản với nền là các ngôi sao, với một bộ vi sai tạo nên mối quan hệ vị trí của chúng và tạo nên tuần trăng. Nó gắn kết năm mặt trời với chu kỳ 19 năm trong các giai đoạn của mặt trăng. Đó là chu kỳ Metonic, mà ở đó mặt trăng mất 235 tháng để trở lại cùng giai đoạn trong cùng một ngày của năm.
Cỗ máy Antikythera này là một bộ lịch 365 ngày. Ngoài ra nó còn cung cấp thông tin về nhật thực và nguyệt thực, cũng như niên giám về các vì sao, mô tả sự chuyển động của mặt trăng. Trong cỗ máy Antikythera, các tính toán cho thấy mặt trăng di chuyển ngang qua bầu trời với vận tốc khác nhau tại các thời điểm khác nhau, lý do bởi nó có quỹ đạo hình êlip quanh trái đất.
Hầu hết các cơ cấu vi sai có 3 bộ phận, sử dụng bánh răng côn để kết nối hai bánh răng đồng trục như một bánh răng truyền. Cơ cấu Antikythera kết nối với một mặt phẳng vi sai khéo léo. Bánh răng màu xanh đầu ra mang bánh răng truyền, chính là trong cơ cấu vi sai hiện đại. Vấn đề kỹ thuật cơ bản của việc hai bánh răng ăn khớp với cùng một vận tốc với bánh thứ ba được giải quyết bởi một bánh răng truyền hai bậc tự do. Bánh răng lớn nhất trong bộ bánh răng truyền có cùng kích thước với bánh răng đồng trục lớn nhất (màu tía); bánh nhỏ nhất của bộ bánh răng truyền có cùng kích thước với bánh đồng trục nhỏ nhất (màu xanh lá cây). Thật sự kích thước của bánh răng truyền không có ý nghĩa quan trọng trong chức năng của cơ cấu vi sai, đó chỉ là một đường thẳng và kiểu chuyển động quay cơ bản, chỉ cần tỉ lệ của hai bánh răng truyền phải giống như tỉ lệ của hai bánh răng đồng trục là được. Bánh răng màu xanh lá cây và bánh răng truyền ăn khớp qua một bánh răng đệm, điều này được chỉ rõ trong sơ đồ bánh răng phía trên. Bánh răng đệm cho phép bánh răng màu xanh lá cây và màu tím có thể quay ngược chiều với bánh răng truyền. Đây chính là cách thức hoạt động của cơ cấu vi sai đường thẳng: thanh răng phía trên làm cho bánh răng chuyền quay cùng chiều kim đồng hồ, trong khi thanh răng phía dưới làm nó quay ngược chiều kim đồng hồ. Tương tự ta cũng có mối quan hệ giữa tốc độ của bánh màu tía, màu xanh lá cây và màu xanh dương: tốc độ của bánh màu xanh dương bằng 1/2 tổng tốc độ của hai bánh màu xanh lá cây và màu tía.
Cơ cấu vi sai được đưa vào thiết bị Antikythera giống như việc trừ chuyển động quay của mặt trời cho chuyển động quay của mặt trăng. Đó là lý do nó thuận lợi để tạo ra bánh răng mặt trời quay ngược chiều với chuyển động của mặt trời. Giá trị ra của cơ cấu vi sai sẽ bằng 1/2 sự khác nhau giữa chuyển động của mặt trăng và mặt trời. Nó đã chỉ ra chính xác tỷ lệ của sự thay đổi của tuần trăng, từ suốt tháng của tuần trăng (mới, 1/4 đầu, tròn,…) chỉ ra chính xác mối quan hệ vị trí của mặt trăng trong bầu trời với các vì sao phụ thuộc vào mặt trời.
Bộ bánh răng ở bên dưới bộ vi sai trong mặt phẳng ăn khớp với bánh răng màu xanh và một trong những bánh răng bánh răng đó sẽ cho ra tín hiệu đầu ra có mối quan hệ chuyển động tăng lên theo thừa số hai; tín hiệu đó đưa ra một bánh răng để biểu diễn chính xác sự quay vòng trong một tháng âm lịch, thời gian cho một vòng kín của tuần trăng. Bánh răng này được sử dụng để quay một bàn số hay một dụng cụ chỉ thị để chỉ ra tuần trăng. Thông thường bàn số nằm phía sau lưng của máy Antikythera, nơi thông tin đó sẽ được hiển thị.
V. Cơ cấu vi sai trong xe ôtô
Cơ cấu vi sai trong xe ôtô thì rất giống cơ cấu vi sai quay đơn giản. Sự khác biệt chính là bánh răng màu xanh dương được chuyển động bên ngoài của bánh
đi lui dần dần của bánh hộ tinh trên bánh hành tinh trái làm cho bánh này quay chậm lại với đặc tính truyền động này, bộ vi sai tự điều chỉnh ở bất cứ sự thay đổi nào của vận tốc của hai bánh xe chủ động.
Khi quẹo phải chẳng hạn, vận tốc vỏ hộp vi sai được xem như 100%. Động tác tự xoay trên trục của hai bánh hộ tinh làm truyền động 90% vận tốc này cho bánh hành tinh quay chậm bên trong đường cong. Trong lúc đó truyền 110% vận tốc vỏ hộp vi sai cho bánh hành tinh nhanh của bánh xe ngoài.
Nếu có một bánh xe chủ động bị trượt trong sình lầy thì bánh thứ hai trong đất khô sẽ đứng yên, xe không tiến được. Trong trườnghợp này vỏ hộp vi sai tiếp tục quay kéo theo các bánh hộ tinh và trục của vó như các bánh hộ tinh đi vòng quanh bánh hành tinh đang đứng yên và truyền toàn bộ mômen cho bánh hành tinh kia để kéo bánh này quay trượt trong sình lầy. Để cài tiến tình trạng này người ta thiết kế loại vi sai không trượt. Đó là một loại vi sai đặc biệt được thiết kế để chúng tự động truyền mômen đến bánh xe không bị trượt, buộc bánh này quay đưa xe vượt lên. Mặc dầu các loại này khác nhau nhưng chúng cùng chung một nguyên lý là dùng các đĩa ma sát nhằm tạo phần lực cản giúp bộ vi sai hoạt động bình thường.
VI. Ứng dụng cơ cấu vi sai trong máy cắt kim loại
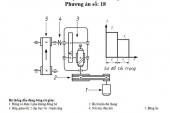
1. Ứng dụng cơ cấu vi sai trong cơ cấu chạy dao nhanh
Để giảm thời gian phụ như đưa bàn máy, bàn dao trở về vị trí ban đầu mỗi chu kỳ làm việc, ta đưa vào xích chạy dao cơ cấu chạy dao nhanh để tăng vận tốc hành trình chạy dao không của bàn máy. Cơ cấu chạy dao nhanh được dùng phổ biến trong nhiều loại máy công cụ, đặc biệt ở máy tự động, máy revolver… Vận tốc chạy dao nhanh có thể dùng từ 2 ÷ 12m/f, trị số thường dùng là 4 ÷ 8m/f.
Hành trình chạy dao nhanh có thể được thực hiện bằng 3 cách:
a) Dùng động cơ riêng để thực hiện chạy dao nhanh, như ở máy tiện T620. Trường hợp này cho kết cấu đơn giản và thường phải dùng li hợp một chiều (siêu việt).
b) Dùng một động cơ cho cả chạy dao nhanh và lượng chạy dao nằn trên hai xích truyền động khác nhau, trong trường hợp này xích chạy dao nhanh tắt đi (máy phay P82).
c) Cả lượng chạy dao nhanh và lượng chạy dao làm việc đều nhận truyền động từ trục chính trên hai xích truyền khác nhau, như máy tiện revolver 1M36.
Thông thường đầu và cuối xích chạy dao nhanh và xích chạy dao làm việc có những tỉ số truyền chung. Để cơ cấu chạy dao nhanh và chạy dao làm việc có thể cùng hoạt động một lúc, trong xích truyền động thường dùng bộ vi sai.
Ta xét cơ cấu chạy dao nhanh và chạy dao làm việc dùng hai động cơ sau đây (hình 1.22).

Chương III
PHÂN ĐỘ KHÔNG CÓ ĐĨA CHIA SỬ DỤNG CƠ CẤU VI SAI
I. Giới thiệu về đầu phân độ không có dĩa chia sử dụng cơ cấu vi sai
Để tăng thêm độ vạn năng của máy phay vạn năng (thường cho máy phay ngang và máy phay đứng), người ta dùng đầu phân độ vạn năng lắp trên bàn làm việc của máy để phân độ và kẹp chặt chi tiết gia công trên trục chính của đầu phân độ với các kiểu đồ gá khác nhau.

Trường hợp sản xuất hàng loạt, việc sử dụng đầu phân độ vạn năng có dĩa chia đòi hỏi người công nhân phải nhớ hàng lỗ để phân độ trong thời gian dài rất dễ gần đến sự mệt mỏi làm dẫn đến sai sót. Để việc phân độ được đơn giản hơn, người ta thường dùng loại đầu phân độ vạn năng không có đĩa chia đo. Với đầu phân độ này, mỗi lần phân độ trục chính phải quay vòng thì tay quay sẽ quay một số vòng chẵn thường là 1 vòng.
Đầu phân độ vạn năng không có đĩa chia độ có hai loại:

- Đầu phân độ có cơ cấu vi sai
- Đầu phân độ có cơ cấu hành tinh.
.......................................
Chương IV
TÍNH TOÁN PHẦN ĐỘNG LỰC HỌC CỦA ĐẦU PHÂN ĐỘ.
Để tính toán phần động lực học của đầu phân độ, xét các trường hợp của đầu phân độ:
– Phân độ trực tiếp.
– Phân độ đơn giản.
– Phân độ phay rảnh xoắn.

Trong các trường hợp trên, khi phân độ phay rãnh xoắn, đầu phân độ chịu tác dụng của lực cắt nhiều nhất nên chọn trường hợp này để tính toán phần động lực học của đầu phân độ. Khi phay rãnh xoắn đầu phân độ chịu tác dụng đồng thời của lục dọc trục theo đường tâm trục chính của đầu phân độ và mômen xoắn do lực cắt Pz gây ra, trong khi các trường hợp phân độ khác đầu phân độ chỉ chịu chủ yếu lực dọc trục.
Để đảm bảo độ bền của đầu phân độ trong quá trình làm việc xét trường hợp đầu phân độ làm việc với khả năng chịu tải lớn nhất (lực tác động lên đầu phân độ lớn nhất) chọn giả thiết ban đầu như sau:
– Bánh răng xoắn gia công có đường kính lớn nhất D = 350 mm, môdun m=8, góc xoắn b =180¸450
THIẾT KẾ VÀ CHẾ TẠO ĐẦU PHÂN ĐỘ MÁY PHAY, thuyết minh, động học máy, kết cấu máy, nguyên lý đầu phân độ, quy trình sản xuất, NGHIÊN CỨU THIẾT KẾ CHẾ TẠO MÁY , ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ