LUẬN VĂN THẠC SĨ Thiết kế và chế tạo hệ thống cam điện tử điều khiển số

NỘI DUNG ĐỒ ÁN
TÓM TẮT Thiết kế và chế tạo hệ thống cam điện tử điều khiển số
Cam cơ khí là một thiết bị được sử dụng nhiều trong máy móc công nghiệp.
Nó biến chuyển động quay thành chuyển động tịnh tiến để điều khiển các cơ cấu chấp hành… Tuy nhiên, cam cơ khí có một số nhược điểm là thiếu linh hoạt, tốn nhiều thời gian để thay đổi thông số cam, làm mài mòn các chi tiết máy… Nên ngày nay người ta đã phát minh ra cam điện tử để khắc phục nhược điểm trên của cam cơ khí.
Trong đề tài này, mô hình cam điện tử là một thiết bị có nguyên lý hoạt động giống với cam cơ khí. Mô hình cam điện tử dựa vào nhưng thông số cơ bản của cam cơ khí để tạo ra chuyển động tịnh tiến giống với cam cơ khí. Với cam điện tử này có thế thay thế được cam cơ khí trong các cơ cấu máy móc.
ABSTRACT
Mechanical cams are common components using in industrial machines. They transfer rotational motion to transitivity motion to control actuator. However,
mechanical cams have some drawbacks that are inflexible, time consumption for changing cam parameters, and mechanical wear problem. Nowadays, electronic cams appear as ideal solutions to overcome the current drawbacks of mechanical cam.
In this research, the electronic cam model has same operation function of mechanical cams. It uses the fundamental parameters of mechanical cams to create transitivity motion like original cam. Therefore, these electronic cams can replace mechanical cam in several of mechines.
MỤC LỤC
LÝ LỊCH KHOA HỌC .................................................................................................I LỜI CAM ĐOAN ...................................................................................................... III LỜI CẢM ƠN ............................................................................................................ IV TÓM TẮT ................................................................................................................... V DANH MỤC HÌNH ................................................................................................... IX
DANH MỤC BẢNG .................................................................................................. XI Chương 1 ...................................................................................................................... 1
TỔNG QUAN .............................................................................................................. 1
1.1 Đặt vấn đề .......................................................................................................... 1
1.2 Cam điện tử .......................................................................................................... 1
1.3 Các kết quả nghiên cứu trong và ngoài nước về cam điện tử .............................. 2
1.4 Tính cấp thiết của đề tài ....................................................................................... 5
1.5 Ý nghĩa khoa học và ý nghĩa thực tiễn của đề tài .................................................. 5
1.5.1 Ý nghĩa khoa học của đề tài ................................................................................ 5
1.5.2 Ý nghĩa thực tiễn của đề tài................................................................................. 5
1.6 Mục tiêu nghiên cứu............................................................................................. 5
1.7 Nhiệm vụ và phạm vi nghiên cứu đề tài ............................................................. 5
1.8 Phương pháp nghiên cứu..................................................................................... 6
Chương 2 ...................................................................................................................... 7
CƠ SỞ LÝ THUYẾT ................................................................................................... 7
2.1 Cơ cấu cam............................................................................................................. 7
2.1.1 Giới thiệu về Cam ............................................................................................. 7
2.1.2 Định nghĩa cơ cấu Cam ..................................................................................... 7
2.1.3 Các thông số cơ bản của cơ cấu cam .................................................................. 8
2.1.3.1 Thông số hình học của cam.............................................................................. 8
2.1.3.2 Thông số động học của cơ cấu cam ................................................................. 8
2.1.3.3 Thông số lực học của cơ cấu cam .................................................................... 9
2.1.4 Phân tích động học cơ cấu cam ......................................................................... 10
2.1.4.1 Cam cần đầu nhọn .......................................................................................... 10
2.1.4.2 Cam cần đầu bằng .......................................................................................... 14
2.1.4.3 Cam cần đầu con lăn ...................................................................................... 14
2.2 Cơ sở thiết kế cam điện tử.................................................................................... 15
2.3 Động cơ ................................................................................................................ 15
2.3.1 Động cơ bước .................................................................................................... 15
2.3.2 Động cơ Servo................................................................................................... 16
2.3.3 Động cơ DC ...................................................................................................... 17
2.3.4. Động cơ tuyến tính (Linear motor) .................................................................. 18
2.4 Cơ cấu truyền động .............................................................................................. 18
2.4.1 Vitme bi............................................................................................................. 18
2.4.2 Bánh răng thanh răng ........................................................................................ 19
2.5 Linh kiện điện tử .................................................................................................. 20
2.5.1 Vi điều khiển ..................................................................................................... 20
2.5.1.1 Định nghĩa ...................................................................................................... 20
2.5.1.2 Sơ lược về IC 89S52 ...................................................................................... 20
2.5.2. LCD hiển thị..................................................................................................... 22
2.5.3 Driver động cơ bước ......................................................................................... 22
Chương 3 .................................................................................................................... 24
THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH CAM ĐIỆN TỬ ........................................... 24
3.1. Thiết kế mô hình cam điện tử ............................................................................. 24
3.1.1. Các phương án thiết kế: ................................................................................... 25
3.1.1.1. Sử dụng cơ cấu bánh răng thanh răng ........................................................... 25
3.1.1.2. Sử dụng động cơ tuyến tính .......................................................................... 26
3.1.1.3. Sử dụng vitme đai ốc bi ................................................................................ 26
3.1.2. Đánh giá các phương án thiết kế: ..................................................................... 27
3.2. Mô hình cam điện tử ........................................................................................... 27
Chương 4 .................................................................................................................... 28
THIẾT KẾ VÀ CHẾ TẠO MẠCH ĐIỀU KHIỂN CAM ĐIỆN TỬ ........................ 28
4.1. Vấn đề cần giải quyết .......................................................................................... 28
4.2. Nội suy đường thằng theo phương pháp ADD ................................................... 29
4.3.Tính toán mối liên hệ giữa các thông số đầu vào và đầu ra ................................. 32
4.4. Sơ đồ khối của mạch điều khiển ......................................................................... 33
4.5. Thiết kế mạch điều khiển .................................................................................... 34
4.5.1. Khối xử lí ......................................................................................................... 35
4.5.2. Khối nguồn ....................................................................................................... 35
4.5.3. Khối hiện thị..................................................................................................... 36
4.5.4. Khối Driver động cơ bước ............................................................................... 36
4.6. Lưu đồ giải thuật của chương trình điều khiển ................................................... 37
Chương 5 .................................................................................................................... 39
KẾT QUẢ VÀ THẢO LUẬN ................................................................................... 39
5.1. Kết quả ................................................................................................................ 39
5.1.1 Phần cứng .......................................................................................................... 39
5.1.2. Phần điều khiển ................................................................................................ 40
5.1.3 Cho chạy mô hình ............................................................................................. 42
5.1.3.1 Chế độ chạy offline ........................................................................................ 42
5.1.3.2 Chế độ chạy online trên máy tính .................................................................. 44
5.2 Khảo nghiệm ........................................................................................................ 45
5.2.1 Mục đích khảo nghiệm ...................................................................................... 45
5.2.2 Tiến hành khảo nghiệm ..................................................................................... 45
5.3 Kết quả khảo nghiệm ........................................................................................... 46
5.3.1 Đo thời gian đĩa quay một vòng T .................................................................... 46
5.3.2 Đo khoảng nâng X của cam điện tử .................................................................. 48
5.4 Thảo Luận ............................................................................................................ 53
Chương 6 .................................................................................................................... 54
KẾT LUẬN VÀ KIẾN NGHỊ.................................................................................... 54
6.1 Kết luận ................................................................................................................ 54
6.2 Kiến nghị .............................................................................................................. 54
TÀI LIỆU THAM KHẢO .......................................................................................... 55
PHỤ LỤC ................................................................................................................... 56
DANH MỤC HÌNH
Hình 1.1 Máy gia công bằng cơ cấu cam ................................................................... 1
Hình 1.2 Cấu tạo tổng quát của Cam điển tử .............................................................. 2
Hình 1.3 Bộ điều khiển CJW-NC[][]4 ........................................................................ 2
Hình 1.4 Bộ điều khiển Ultra 5000 ............................................................................. 3
Hình 1.5 Bộ điều khiển SDS5000 và MDS5000 ........................................................ 3
Hình 1.6 Bộ điều khiển FM 452.................................................................................. 4
Hình 1.7 Bộ điều khiển XSEL –P/Q ........................................................................... 4
Hình 1.8 Biên dạng cam cần tạo ra ............................................................................. 5
Hình 2.1 Hình dạng của một cam cơ khí .................................................................... 7
Hình 2.2 Cơ cấu cam cơ khí ........................................................................................ 7
Hình 2.3 Các cơ cấu cam phẳng .................................................................................. 8
Hình 2.4 Các cơ cấu cam không gian.......................................................................... 8
Hình 2.5 Góc công nghệ và góc định kì trên cơ cấu cam ........................................... 9
Hình 2.6 Góc áp lực trên cơ cấu cam ........................................................................ 10
Hình 2.7 Mô tả cách vẽ đồ thị chuyển vị (cần tịnh tiến) ........................................... 10
Hình 2.8 Mô tả cách vẽ đồ thị chuyển vị – vận tốc – gia tốc (cần tịnh tiến) ............ 12
Hình 2.9 Mô tả cách vẽ đồ thị chuyển vị (cần quay) ................................................ 13
Hình 2.10 Mô tả cách vễ đồ thị chuyển vị (cần đầu bằng) ....................................... 14
Hình 2.11 Cách vẽ biên dạng lý thuyết từ biên dạng thực ........................................ 15
Hình 2.12 Cấu tạo của động cơ bước ........................................................................ 15
Hình 2.13 Nguyên lý hoạt động của động cơ bước .................................................. 16
Hình 2.14 Động cơ Servo.......................................................................................... 17
Hình 2.15 Các loại đông cơ DC ................................................................................ 17
Hình 2.16 Cấu tạo của động cơ DC .......................................................................... 17
Hình 2.17 Động cơ tuyến tính ................................................................................... 18
Hình 2.18 Quan hê giưa lưc ma sat va vân tôc cua vitme đai ôc thương
và vit me đai ôc bi ...................................................................................................... 18
Hình 2.19 Bô truyên vit me đai ôc bi ......................................................................... 19
Hình 2.20 Cấu tạo của bánh răng thanh răng ............................................................ 19
Hình 2.21 Sơ đồ chân của họ vi điều khiển AT89Sxx .............................................. 21
Hình 2.22 LCD hiện thị............................................................................................. 22
Hình 2.23 Driver GY-A4988 .................................................................................... 22
Hình 2.24 Driver động cơ bước MD556 ................................................................... 23
Hình 3.1 Biên dạng cam cần tạo ra ........................................................................... 24
Hình 3.2 Mô hình cam điện tử .................................................................................. 24
Hình 3.3 Hình dạng của đĩa quay .............................................................................. 25
Hình 3.4 Cấu tạo của cơ cấu bánh răng thanh rang .................................................. 25
Hình 3.5 Động cơ tuyến tính ..................................................................................... 26
Hình 3.6 Vitme đai ốc bi ........................................................................................... 26
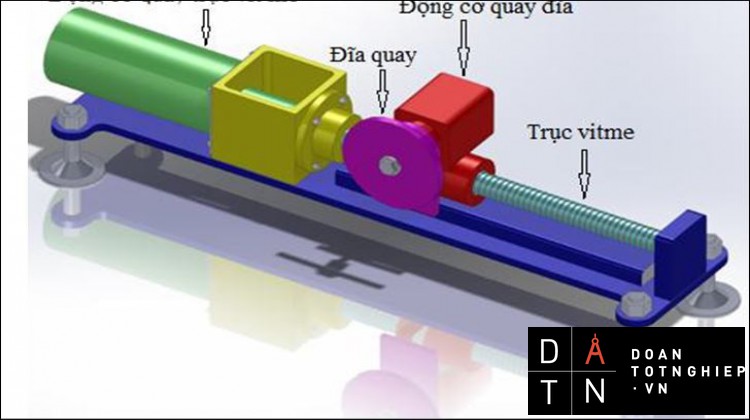
Hình 3.7 Mô hình 3D của cam điện tử ...................................................................... 27
Hình 4.1 Các thông số của cam điện tử .................................................................... 28
Hình 4.2 Mô tả mối quan hệ giữa góc quay và khoảng nâng của cam ..................... 29
Hình 4.3 Nội suy tuyến tính ...................................................................................... 29
Hình 4.4 Sơ đồ khối của nội suy tuyến tính .............................................................. 31
Hình 4.5 Sơ đồ khối của mạch điều khiển ................................................................ 34
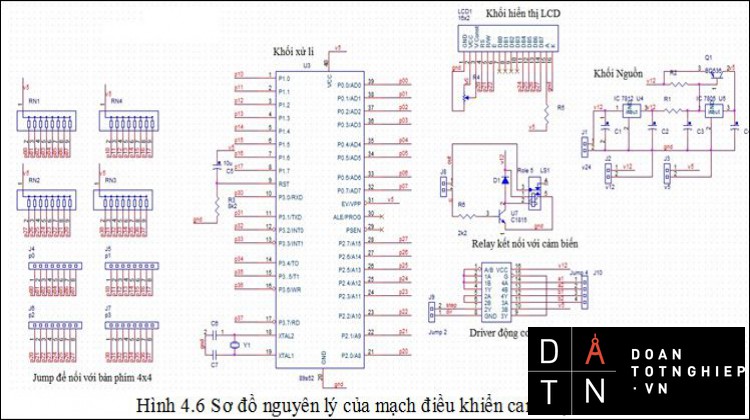
Hình 4.6 Sơ đồ nguyên lý của mạch điều khiển cam điện tử .................................... 34
Hình 4.7 Sơ đồ nguyên lý mạch vi điều khiển AT89S52 ......................................... 35
Hình 4.8 Sơ đồ nguyên lý mạch nguồn 5V ............................................................... 35
Hình 4.9 Sơ đồ nguyên lý khối hiện thị .................................................................... 36
Hình 4.10 Sơ đồ Driver điều khiển động cơ bước .................................................... 36
Hình 4.11 Lưu đồ giải thuật điều khiển cam điển tử ................................................ 37
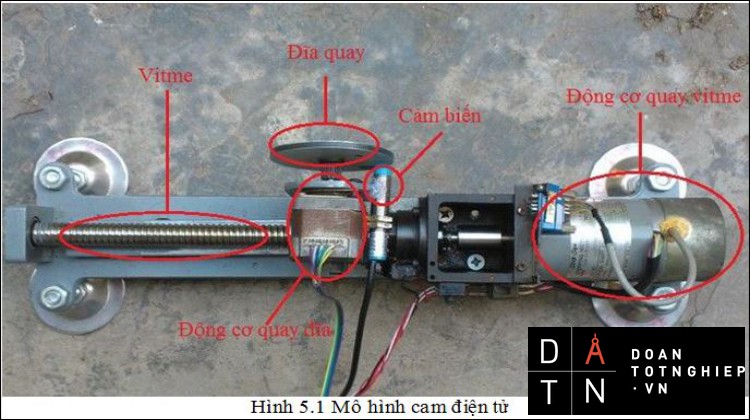
Hình 5.1 Mô hình cam điện tử .................................................................................. 39
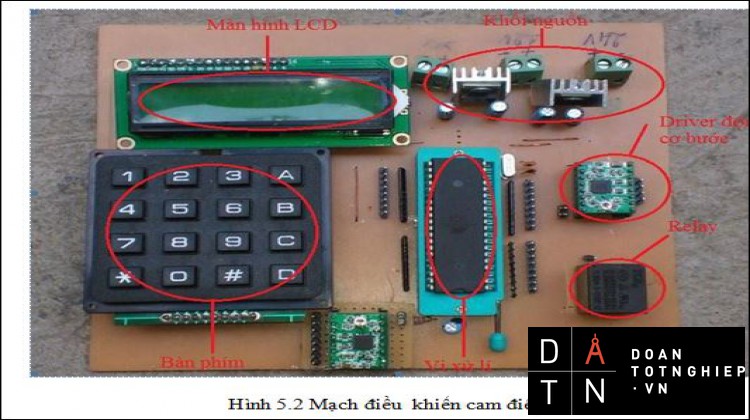
Hình 5.2 Mạch điều khiển cam điển tử ..................................................................... 40
Hình 5.3 Driver điều khiển động cơ bước quay vitme.............................................. 41
Hình 5.4 Hình kết nối mạch điều khiển với mô hình cam điện tử ............................ 41
Hình 5.5 Hình yêu cầu ta cho chạy bước tiếp theo hay set cam về vị trí gốc ........... 42
Hình 5.6 Nhập thời gian cam quay hết một vòng ..................................................... 42
Hình 5.7 Nhập khoảng nâng cam X .......................................................................... 43
Hình 5.8 Nhập góc nâng cam θ ................................................................................. 43
Hình 5.9 Cho cam hoạt động hay xóa để nhập lại các thông số cam mới ................ 43
Hình 5.10 Giao diện điều khiển cam trên máy tính .................................................. 44
Hình 5.11 Vẽ biên dạng cam trên máy tính .............................................................. 44
Hình 5.12 Bố trí đồng hồ so để đo khoảng nâng X ................................................... 45
Hình 5.13 Biểu đồ thể hiện sai lệch giữa thời gian đo được và nhập vào (T =1s) ... 46
Hình 5.14 Biểu đồ thể hiện sai lệch giữa thời gian đo được và nhập vào (T = 2s) .. 47
Hình 5.15 Biểu đồ thể hiện sai lệch giữa thời gian đo được và nhập vào (T = 3s) .. 48
Hình 5.16 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1mm, T = 2s và θ = 360)..................................................................................... 49
Hình 5.17 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1mm, T = 2s và θ = 180) .................................................................................... 49
Hình 5.18 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1mm, T = 4s và θ = 360) .................................................................................... 50
Hình 5.19 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 0,6mm, T = 2s và θ = 360).................................................................................. 51
Hình 5.20 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 0,6mm, T = 2s và θ = 180).................................................................................. 51
Hình 5.21 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 0,6mm, T = 4s và θ = 360) ................................................................................. 51
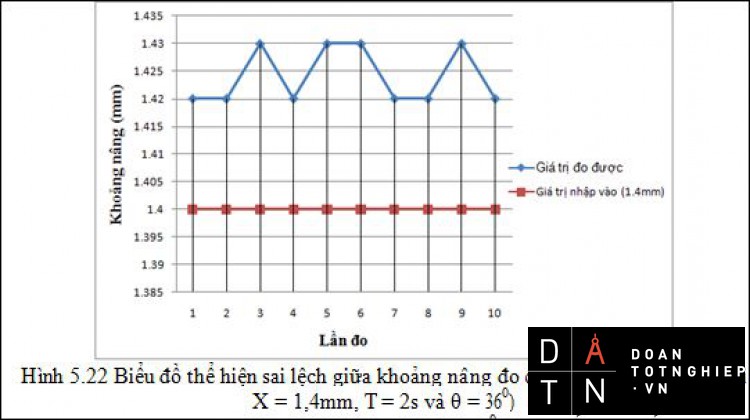
Hình 5.22 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1,4mm, T = 2s và θ = 360) ................................................................................. 52
Hình 5.23 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1,4mm, T = 2s và θ = 180) ................................................................................. 53
Hình 5.24 Biểu đồ thể hiện sai lệch giữa khoảng nâng đo được và nhập vào (ứng với
X = 1,4mm, T = 4s và θ = 360).................................................................................. 53
DANH MỤC BẢNG
Bảng 2.1: Chức năng từng chân của Port 3 .............................................................. 21
Bảng 4.1. Bảng số liệu số xung cấp cho hai động cơ khi biết X và θ
(góc θ thay đổi) ......................................................................................................... 33
Bảng 4.2. Bảng số liệu số xung cấp cho hai động cơ khi biết X và θ ( tăng X) ....... 33
Bảng 5.1 Bảng số liệu đo thời gian quay đĩa T ứng với giá trị nhập vào T = 1s...... 46
Bảng 5.2 Bảng số liệu đo thời gian quay đĩa T ứng với giá trị nhập vào T = 2s...... 47
Bảng 5.3 Bảng số liệu đo thời gian quay đĩa T ứng với giá trị nhập vào T = 3s...... 48
Bảng 5.4 Bảng số liệu về khoảng nâng X ứng với giá trị nhập X = 1mm với thời gian
T và góc nâng θ thay đổi ........................................................................................... 49
Bảng 5.5 Bảng số liệu về khoảng nâng X ứng với giá trị nhập X = 0,6mm với thời
gian T và góc nâng θ thay đổi ................................................................................... 50
Bảng 5.6 Bảng số liệu về khoảng nâng X ứng với giá trị nhập X = 1,4mm với thời
gian T và góc nâng θ thay đổi ................................................................................... 52
1.1 Đặt vấn đề
Chương 1
TỔNG QUAN
Viêt Nam đang trên đa phát triển thực hiện quá trình công nghiệp hoá , hiên đai
hoá đất nước , chính vì vậy những năm gần đây ngành cơ khí ở nước ta rất được coi trọng và đầu tư phát triển . Ngành cơ khí chế tạo máy bao gồm nhiều công đoạn , nhiều ngành trong đó ngành gia công cơ khí giữ vai trò quan trọng trong lĩnh vực
chê tao chi tiêt may đăc biêt trong san xuât chê tao hang loat .
Để sản xuất chế tạo hàng loạt thì có nhiều cách, và một trong những cách đó là
ta sử dụng cơ cấu cam để tiến hành sản xuất chế tạo.
Hình 1.1 Máy gia công bằng cơ cấu cam
Cơ cấu cam cơ khí hiện nay được sử dụng rất là rộng rãi nhưng nó vẫn còn có
một số nhược điểm đó là khi cần thay đổi kích thước chi tiết gia công hoặc khi cam bị mòn thì ta phải thay cam mới. Mà công đoạn thay cam mới rất là tốn thời gian và tiền bạc.
Để giải quyết vấn đề đó thì ta cần phải chế tạo ra một cơ cấu cam mới có thể
thay đổi kích thước cam dễ dàng và nhanh chóng nhưng lại giảm bớt chi phí. Đó là
lí do em chọn đề tài nghiên cứu và chế tạo hệ thống cam điện tử điều khiển số.
1.2 Cam điện tử
Chính vì sự thiếu linh hoạt và không đáp ứng được yêu cầu trong sản xuất
hiện đại nên cam cơ khí ngày càng dần được thay thế bằng thiết bị điều khiển bằng điện tử gọi là cam điện tử.
Định nghĩa cam điện tử:
Cam điện tử là một thiết bị kỹ thuật được sử dụng để thực hiện chuyển động
qua lại tương tự như cam cơ khí.
Ta chỉ cần nhập các thông số của cam cơ khí vào bộ điều khiển, bộ điều
khiển sẽ tự động tính toán để điều khiển động cơ bước, servo… để tạo chuyển động
cho cơ cấu vit me, đai ốc, bánh răng, thanh răng
Hình 1.2 Cấu tạo tổng quát của Cam điển tử [nguồn: Internet]
1.3 Các kết quả nghiên cứu trong và ngoài nước về cam điện tử
Trên thế giới, cam điện tử đã được nghiên cứu từ lâu và được ứng dụng rất nhiều trong công nghiệp. Cơ sở để thiết kế các cam điện tử này là đều dựa vào các
thông số cơ bản của cam như biên dạng cam, góc quay của trục phân phối và khoảng nâng cam…để thiết kế ra một bộ điều khiển cho các động cơ ví dụ như động cơ bước, servo, DC….Những động cơ này sẽ tạo ra những chuyển động giống như cam cơ khí để điều khiển các cơ cấu chấp hành.
Sau đây là một số bộ điều khiển cam điện tử của các hàng sản xuất lớn trên thế giới:
Hình 1.3 Bộ điều khiển CJW-NC[][]4
Bộ điều khiển CJW-NC[][]4 do hãng OMRON chế tạo, bộ điều khiền này điều khiển 2 động cơ servo, để tạo ra chuyển động tịnh tiến cho đai ốc và chuyển động quay cho trục quấn dây.
Hình 1.4 Bộ điều khiển Ultra 5000
Bộ điều khiển Ultra5000 của hãng Rockwell Automation, bộ điều khiền này điều khiển 2 động cơ servo, để tạo ra chuyển động tịnh tiến dọc cho bàn máy và chuyển động ngang cho đầu công tác.
Hình 1.5 Bộ điều khiển SDS5000 và MDS5000
Bộ điều khiển SDS5000 và MDS5000 của hãng Stoeber dùng để điều khiển
động cơ servo. Nguyên lý thiết kế bộ điều khiển này là dựa vào sự quan hệ giữa vị trí, góc quay trục phân phối vị trí của cơ cấu chấp hành để xây dựng thuật toán điều khiển các động cơ servo.
Hình 1.6 Bộ điều khiển FM 452
Bộ điều khiển FM 452 của hãng Siemens, là một modul điều khiển đơn, và
nó được gắn vào hệ thống tự động S7-400. Nó được dùng trong những chuyển động quay và tịnh tiến. Khi vận hành nó có thể nhận được tín hiệu phản hồi từ Encoder.
Hình 1.7 Bộ điều khiển XSEL –P/Q
Bộ điều khiển XSEL –P/Q của hãng IAI, bộ điều khiển được ứng dụng trong các máy tự động, ví dụ như điều khiển cánh tay Robot, chuyển động tịnh tiến qua lại của Robot như là chuyển động quay của trục phân phối và chuyển động này phối hợp với chuyển động của dao cắt để cắt vật liệu liên tục mà không phải cần dừng băng tải.
Ở Việt Nam, chỉ có một đề tài nghiên cứu về cam điện tử là: Mô hình thí nghiệm cam điện tử do học viên cao học Lê Thanh Phúc bảo vệ tại hội đồng khoa Cơ Khí trường Đại học Sư Phạm Kỹ Thuật TP.HCM năm 2012.
Do các đề tài nghiên cứu về cam điện tử chưa thật sự nhiều. Chính vì vậy, tôi xin chọn đề tài nghiên cứu này để tìm hiểu và giải mã công nghệ thiết kế bộ điều khiển cam điện tử trên thế giới và từ đó ứng dụng nó vào trong thực tiễn, sản xuất.
1.4 Tính cấp thiết của đề tài
Cơ cấu cam được sử dụng trong các máy tự động, trong hệ thống điều khiển
các quá trình công nghệ và trong nhiều bộ phận máy như: hệ đóng mở van nạp, van xả của động cơ đốt trong, điều khiển các bánh răng di trượt dọc trục ra vào khớp để thay đổi tốc độ trong các hợp số, đóng gói bao bì trong công nghiệp, trong ngành công nghiệp gỗ, xử lý vật liệu, máy in,...
Khi có sự thay đổi về kích thước của chi tiết cần gia công có liên quan đến cơ cấu cam hay cam bị mòn thì ta phải tiến hành thay đổi cơ cấu cam mới cho phù hợp. Để thay đổi cơ cấu cam mới thì rất tốn thời gian và tiền bạc. Để giảm bớt thời gian thây đổi cơ cấu cam và tiết kiệm chi phí đầu tư thì ta phải thay đổi cơ cấu cam cơ khí bằng một cơ cấu cam khác mà sao cho đạt được mục tiêu nêu trên.
Cơ cấu cam phù hợp với mục tiêu trên đó là cơ cấu cam điện tử bởi vì cơ cấu
cam điện tử có nhưng ưu điểm hơn so với cơ cấu cam cơ khí như sau:
Rất dễ dàng sữa đổi, thây đổi các thông số của cam.
Sự mòn của phần cơ khí thấp, các thông số của Cam được đưa ra bởi chương
trình.
Giảm thời gian thay đổi Cam khác.
1.5 Ý nghĩa khoa học và ý nghĩa thực tiễn của đề tài
1.5.1 Ý nghĩa khoa học của đề tài
Sản phẩm của đề tài sẽ được sử dụng làm tài liệu để nghiên cứu, chế tạo cam
điện tử để thay thế tất cả các loại cơ cấu cam cơ khí hiện nay.
1.5.2 Ý nghĩa thực tiễn của đề tài
Sử dụng cam điện tử để thay thế các loại cam cơ khí được trong các máy
móc, các hệ thống tự động hiện nay.
1.6 Mục tiêu nghiên cứu
Mục tiêu của đề tài: Thiết kế, chế tạo mô hình và bộ điều khiển cam điện tử với những đặc điểm là khi nhập những thông số cam cơ khí vào bộ điều khiển, bộ
điều khiển sẽ tính toán, điều khiển các động cơ bước hoạt động để tạo ra những chuyển động và thời gian đáp ứng giống như cam cơ khí.
1.7 Nhiệm vụ và phạm vi nghiên cứu đề tài
Để thực hiện mục tiêu trên, đề tài cần tập trung vào các vấn đề sau:
Tìm hiểu về hình dạng và nguyên lý hoạt động của cam cơ khí từ đó tìm ra hướng nghiên cứu cho hệ thống điều khiển cam điện tử.
Thiết kế và chế tạo mô hình cơ khí.
Thiết kế và thực hiện mạch điều khiển cho mô hình.
Kiểm tra kết quả đạt được qua hoạt động của mô hình.
Nhận xét kết quả và kết luận.
Giới hạn của đề tài:
Mô hình cam điện tử mô phỏng chuyển động do cam đĩa phẳng tạo ra.
Biên dạng của cam điện tử tạo ra là:
Hình 1.8 Biên dạng cam cần tạo ra
1.8 Phương pháp nghiên cứu
Phương pháp nghiên cứu gồm hai phần chính: Nghiên cứu phân tích lý thuyết: Thu thập tài liệu từ các nguồn báo chí, tạp chí, sách, từ internet có liên quan đến nội dung nghiên cứu.
Phương pháp thực nghiệm: Tiến hành tính toán, thiết kế, chế tạo và đánh giá
thử nghiệm mô hình cam điển tử.
......................
6.1 Kết luận
Chương 6
KẾT LUẬN VÀ KIẾN NGHỊ
Luận văn sau khi hoàn thành đạt được những kết quả sau đây:
Chế tạo được mô hình cam điện tử
Thiết kế và chế tạo mạch điều khiển cam điện tử nhỏ gọn chạy ổn định.
Viết chương trình điều khiển cho mô hình cam điện tử.
Tiến hành khảo nghiệm để lấy kết quả hoạt động của cam để đánh giá
sai số
Mô hình cam điển tử hoạt động ổn định và đạt độ chính xác theo yêu cầu.
6.2 Kiến nghị
Để có thể sản xuất được cam điện tử cung cấp cho thị trường thì cần phải phải
phát triển thêm theo những hướng sau:
Chế tạo mô hình cam gọn nhỏ hơn nữa.
Sử dụng các động cơ hoạt động tốc độ cao hơn và đạt độ chính xác cao
hơn.
Sử dụng vitme nhỏ, gọn và chính xác cao.
Sử dụng các họ vi điều khiển cao cấp hơn để điều khiển dễ và chính xác
hơn. Chế tạo ra cam điện tử đa năng có thể sử dụng trong nhiều trường hợp khác nhau.



