ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử TRẠM LƯU KHO TỰ ĐỘNG

NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử TRẠM LƯU KHO TỰ ĐỘNG
MỞ ĐẦU
Ngày nay với sự phát triển như vũ bão của các lĩnh vực khoa học kĩ thuật khác nhau, đặc biệt là các lĩnh vực như công nghệ thông tin, cơ điện tử, hàng không vũ trụ, an ninh quốc phòng và các ngành năng lượng mới đã giúp cho ngành công nghiệp của nước ta ngày càng phát triển nhưng dó chưa phải là đích mà chúng ta đã đạt được vì chúng ta còn thiếu sót trong khâu quản lý công nhân, trong khâu sản xuất cũng như ứng dụng thiết bị máy móc thay thế cho con người.
Với xu hướng giảm tối thiểu sức người xuống và năng suất lao động tăng lên đòi hỏi phải có nhiều máy móc và trang thiết bị có thể tự động làm việc một cách chính xác mà không cần con người giám sát.
Chính vì lí do đó trong suốt quá trình làm đồ án tốt nghiệp nhóm đã phải nỗ lực hết sức để có thể chế tạo một mô hình có thể giảm bớt phần nào sức người khi lưu trữ một máy móc nào đó hoặc đơn giản hơn là nông sản sau mùa thu hoạch.
Trong suốt quá trình làm nhóm chúng em đã phác thảo bản vẽ 3D và thi công cơ cấu cơ khí.Tuy nhiên do là sinh viên chưa hề có kinh nghiệm thực tế vẫn còn đang theo học ở trường cho nên không tránh khỏi sai sót về cơ khí như sai số lắp ghép các chi tiết do đó hoạt động của hệ thống không được mượt mà mong thầy thông cảm và đóng góp ý kiến để nhóm có thể hoàn thiện tốt hơn,có kinh nghiệm hơn cho công việc sau này.

MỤC LỤC
Mở đầu :
Trang
Chương 1: Giới thiệu
- Lời giới thiệu............................................................................................................... 1
- Mục đích đề tài........................................................................................................... 2
- Đặc vần đề................................................................................................................... 3
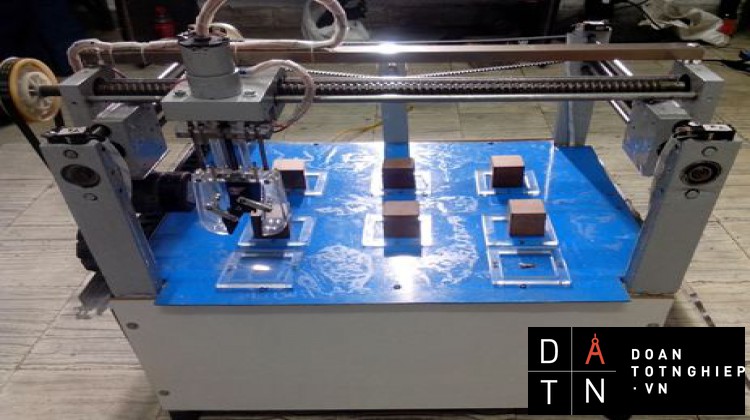
- Mô hình thực tế.......................................................................................................... 4
Chương 2 : Cơ sở thiết kế
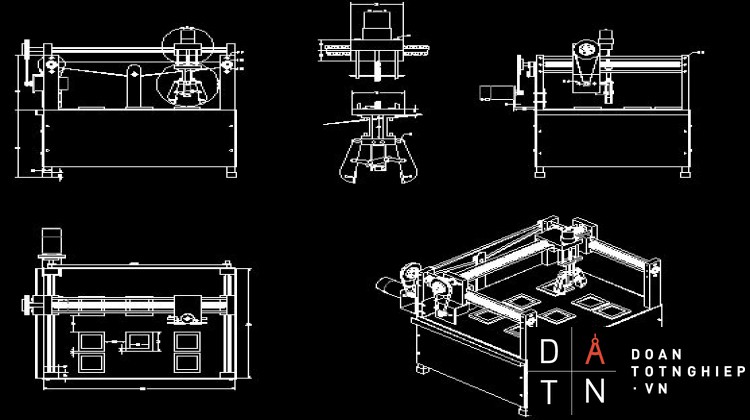
2.1 Thiết kế cơ khí............................................................................................................ 5
2.1.1 Bản vẽ 2d................................................................................................................. 5
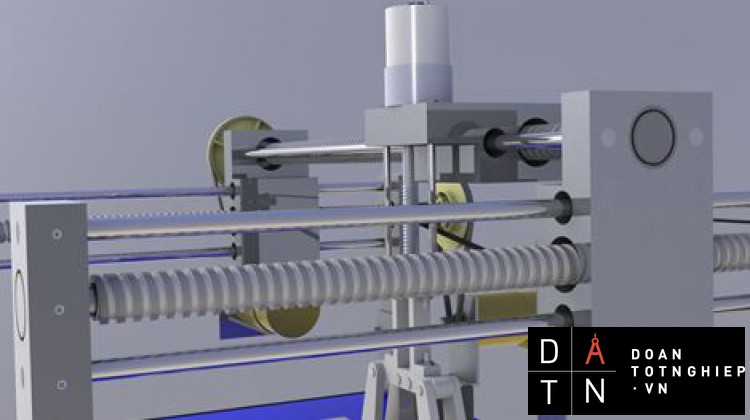
2.1.2 Bản vẽ 3d................................................................................................................. 15
2.2 Vật liệu và dụng cụ thi công..................................................................................... 18
2.2.1 Vật liệu..................................................................................................................... 18
2.2.2 Dụng cụ thi công..................................................................................................... 18
2.3 Tính toán các dụng cụ truyền................................................................................... 19
2.3.1 Trục vít me............................................................................................................... 19
2.3.2 Tỷ số truyền qua puli............................................................................................. 20
2.3.3 Thông số động cơ.................................................................................................... 20
2.3.4 Thông số dây đai răng............................................................................................ 21
Chương 3 : Cơ sở thiết kế điện tử
3.1 Các linh kiện sử dụng trong mạch điện tử.............................................................. 22
3.1.1 Điện trở..................................................................................................................... 22
3.1.2 Diode........................................................................................................................ 22
3.1.3 IC ổn áp.................................................................................................................... 23
3.1.4 Tụ điện...................................................................................................................... 24
3.1.5 Opto PC817.............................................................................................................. 24
3.1.6 Led............................................................................................................................ 25
3.1.7 Transistor 2SD882.................................................................................................. 25
3.1.8 LCD x 16.................................................................................................................. 26
3.1.9 Biến áp...................................................................................................................... 27
3.1.10 IRF 250................................................................................................................... 28
3.1.11 Relay....................................................................................................................... 29
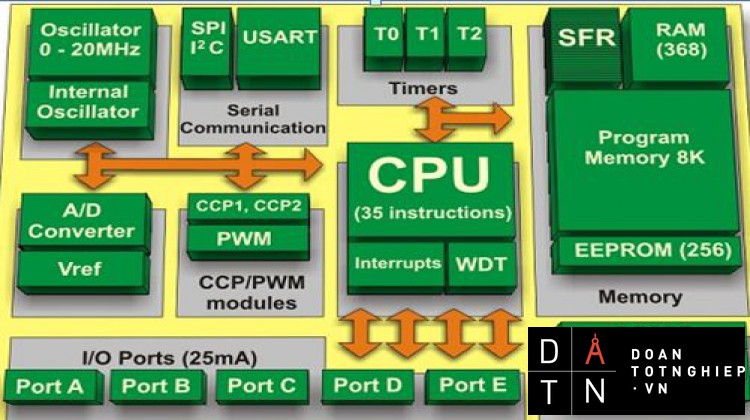
3.1.12 Pic 16f887.............................................................................................................. 30
3.1.13 Một số linh kiện khác.......................................................................................... 32
3.2 Mạch điện tử............................................................................................................... 33
3.2.1 Mạch driver điều khiển trục X và Y.................................................................... 33
3.2.2 Mạch driver điều khiển trục nâng tay gắp.......................................................... 34
3.2.3 Mạch điều khiển dùng PIC16F887....................................................................... 36
3.2.4 Mạch LCD................................................................................................................ 37
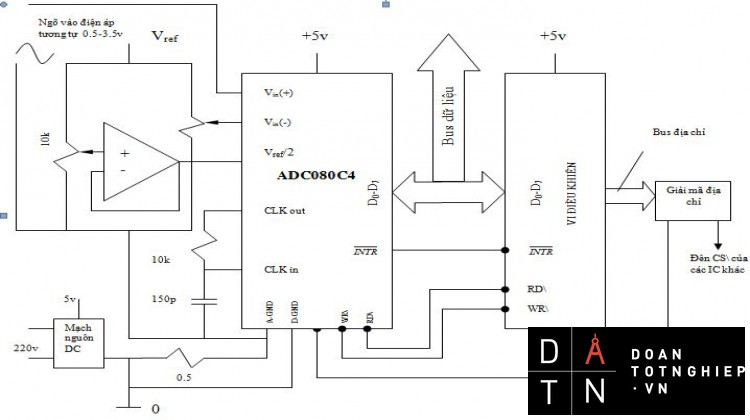
3.2.5 Mạch nguồn............................................................................................................. 39
3.3 Động cơ trục X và Y.................................................................................................. 40
3.4 Động cơ RC servo...................................................................................................... 40
3.5 Bảng địa chỉ kết nối PIC16F887(Master)............................................................... 44
3.6 Bảng địa chỉ kết nối PIC16F887(Slaver)................................................................ 45
Chương 4 : Lập trình
4.1 Lưu đồ.......................................................................................................................... 46
4.1.1 Lưu đồ chính master............................................................................................... 46
4.1.2 Chương trình ngắt master....................................................................................... 47
4.1.3 Chương trình manual-control................................................................................ 48
4.1.4 Chương trình semi-automatic................................................................................ 50
4.1.5 Chương trình auto-run............................................................................................ 51
4.1.6 Chương trình Slave................................................................................................. 52
4.2 Tài liệu tham khảo..................................................................................................... 54
Chương 1: GIỚI THIỆU
- Lời giới thiệu.
Trong những thập niên cuối thế kỷ 20, kỹ thuật điện tử đã liên tục có những tiến bộ vượt bậc, đặc biệt là trong kỹ thuật chế tạo vi mạch điện tử. Sự ra đời và phát triển nhanh chóng của kỹ thuật điện tử mà đặc trưng là kỹ thuật vi xử lý đã tạo ra một bước ngoặt quan trọng trong sự phát triển của khoa học tính toán và xử lý thông tin, nó ảnh hưởng quyết định đến con đường “tin học hoá” xã hội, tức là con đường mà thông tin đã và đang trở thành lực lượng sản xuất trực tiếp trong nền sản xuất của kỷ nguyên tới.
Ngày nay nhằm tăng sức lao động của công nhân lên hàng loạt các phát minh máy móc tự động hoá ra đời. Với nhu cầu phát triển đó nhóm chúng em đã trình bày một dạng mô hình trong sản xuất công nghiệp đảm nhiêm việc lưu hàng hoá đó là trạm lưu kho tự động.
- Mục đích đề tài.
Hiện nay, việc đổi mới máy móc thiết bị công nghệ đặt ra như một yêu cầu cấp thiết đối với các doanh nghiệp bởi máy móc thiết bị của các doanh nghiệp đã cũ và lạc hậu.
Việc đổi mới máy móc thiết bị là đòi hỏi khách quan đối với các doanh nghiệp nếu muốn chiến thắng trong cạnh tranh, củng cố và mở rộng chỗ đứng của mình trên thị trường cả trong hiện tại và tương lai.khi thực hiện hoạt động đầu tư đổi mới doanh nghiệp cần tiến hành điều tra, nghiên cứu kỹ tính năng kỹ thuật cũng như mức độ tối tân của công nghệ sắp đầu tư. Việc điều tra, nghiên cứu này sẽ giúp doanh nghiệp tránh việc đầu tư vào những công nghệ lạc hậu, làm giảm sút hiệu quả của hoạt động đầu tư.
Thời gian và sức khoẻ là những thứ mà mội công nghệ hướng tới vì thế việc rút ngắn thời gian và ít tổn hao sức khoẻ trong lao động sản xuất là yếu tố quan trọng nên chúng em đã tạo ra một mô hình nhàm giúp việc cất giữ hàng hoá nhanh hơn, giảm sức lao động của con người và tránh tiếp xúc với những hàng hoá hay nơi nguy hiểm đó là trạm lưu kho tự động.
- Đặt vấn đề.
Đây là một đề tài nghiên cứu mang tính thực tiễn trong việc vận dụng các kiến thức đã được học dưới mái trường vào trong thực tế. Ngày nay cùng với sự phát triển hiện đại của khoa học kĩ thuật ,thì công nghệ chế tạo các thiết bị tự động cho thấy tầm quan trọng của mình.
Các phát minh,sáng tạo ngày càng có bước đột phá lớn,bằng việc phát minh ra nhiều máy móc thiết bị tự động thế hệ mới với trình độ kĩ thuật ngày càng hiện đại.
Nhóm báo cáo chúng em quyết định chọn đề tài trạm lưu kho tự động.
Về mặt khoa học, đề tài sẽ giúp cho nhóm sinh viên thực hiện hiểu rõ thêm về cơ cấu và nguyên lý làm việc thực tiễn cũng như phương hướng phát triển của các hệ thống lưu giữ hàng hoá tự động trong thực tế.
Về mặt thực tiễn, đề tài này có thể áp dụng vào thực tế để tạo ra một hệ thống lưu giữ hàng hoá tự động thật sự với nguyên tắc làm việc giống nhau hoặc tương tự.
Trong quá trình thiết kế trạm lưu kho chắc hẳn sẽ gặp rất nhiều khó khăn.Nhóm thiết kế chúng em cũng sẽ phải gặp rất nhiều khó khăn từ việc thiết kế cơ cấu cơ khí ,mạch điện tử xử lí cũng như phần lập trình điều khiển.Nhưng ngày nay những tài liệu liên quan đến nó cũng ngày càng nhiều và nó sẽ hỗ trợ rất nhiều cho chúng em trong việc thiết kế mô hình trạm và quan trọng nhất là chúng em củng có sự hỗ trợ tận tình của thầy hướng dẫn Nguyễn Thanh Phước và các thầy(cô)trong bộ môn trong quá trình thiết kế mô hình.
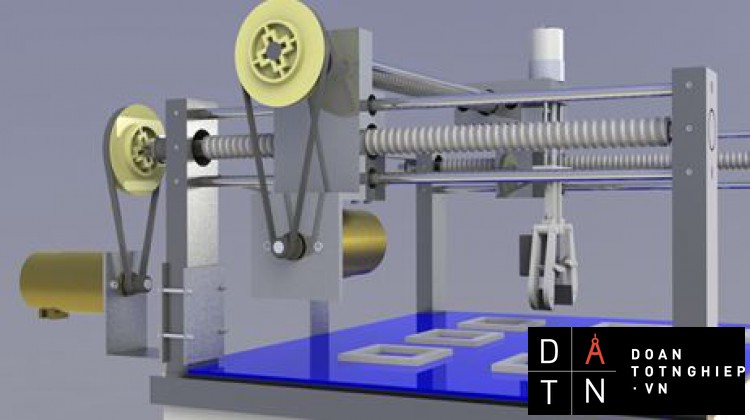
- Mô hình thực tế.
- ...........................
- Vật liệu và dụng cụ thi công.
- ..................
Các thành phần chính:
- Động cơ 1 chiều – (Số 1)
- Biến trở - (Số 6)
- Hộp giảm tốc – (Số 7)
- Mạch điều khiển - (Số 2)
- Vỏ - (Số 9)
- Dây tín hiệu - (Số 4)
- Dây mass – (Số 5)
- Dây Nguồn 5V-6V – (Số 3)
- Chip điều khiển – (Số 10)
- Bánh quay gắn bên ngoài động cơ – (Số 8)
- Các thông số kỹ thuật của Servo:
- Hai thông số kỹ thuật quan trọng của servo là tốc độ và moment xoắn. Tốc độ được xác định là thời gian để quay tới một góc cho trước, ví dụ như mất 0.15s để quay một góc 60 độ. Moment xoắn được cho bởi kg-cm. Tốc độ và moment được gắn cho một điện áp nhất định, thường là 4,8V và 6V. Một yếu tố nữa ảnh hưởng tới tốc độ và moment xoắn, đó là vật liệu làm ổ quay, có thể được làm bằng nhựa, vòng bi hay bạc lót kim loại. Loại được làm bằng vòng bi là tốt nhất.
Servo có nhiều kích thước và khối lượng, cỡ siêu nhỏ, cỡ mini, cỡ tiêu chuẩn và có cả những servo cỡ lớn.
- Giản đồ xung hoạt động: (Hình 3.32)
(Hình 3.30)
-Ta dễ dàng nhận thấy sự thay đổi góc quay phụ thuộc vào độ rộng xung.
- Với độ rộng xung là 1ms thì động cơ sẽ ở vị trí 0o.
- Với độ rộng xung là 1.5ms thì động cơ sẽ ở vị trí 90o.
- Với độ rộng xung là 2ms thì động cơ sẽ ở vị trí 180o.
- Và ta có thể tính toán ra nhiều góc quay hơn nữa dựa vào hệ thức nhân chéo chia ngang.
-Phương pháp lập trình cho RC:
- Dùng hàm delay
- Dùng giải thuật đếm và so sánh.
- Dùng module PWM
- Dùng hàm delay : một chân I/O của vi điều khiển xuất ra mức logic 1 ,sau đó delay 1 khoảng thời gian a (chính là thời gian mức cao của xung điều khiển động cơ mong muốn ) . Tiếp theo đó kéo chân I/O đó xuống mức 0. Delay thêm 1 khoảng thời gian nữa cho đủ 20ms . Đây là giải thuật đơn giản , thiết kế phần cứng sẽ gọn nhẹ vì chỉ dùng các chân I/O là đủ khả năng điều khiển được động cơ . Mỗi chân I/O tương ứng với 1 chân điều khiển động cơ . Chi phí thi công mạch rất thấp. Tuy nhiên trong giải thuật này hầu hết thời gian vi điều khiển chẳng làm gì cả ( và cũng chắng có khả năng xử lý công việc nào cả ) nên muốn sử dụng phương án này ta cần có thêm phần giao tiếp nó . Tức có nghĩa là thiết kế phần điều khiển RC SERVO thành 1 module chuyên dùng để delay và có thêm 1 cổng để giao tiếp với module này . Bên cạnh đó nếu dung nhiều động cơ ta phải so sánh các giá trị delay với nhau để biết được delay cho động cơ nào trước , cho động cơ nào sau . Vấn đề này gây khó khăn khi lập trình khi mà ta không thể viết thuật toán để sắp xếp được dữ liệu (vì hàm delay sử dụng quá nhiều ).
-Dùng giải thuật đếm và so sánh : ý tưởng của giải thuật này là tạo 1 biến đếm khoảng 10us và liên tục đếm cho đến 20ms thì reset biến đếm . Khi đó sẽ cho chân điều khiển RC SERVO lên 1 . Biến đếm này sẽ được so sánh với các giá trị chính là các số chính là các giá trị các độ rộng xung lên của các xung điều khiển động cơ . Nếu 1 so sánh >= xảy ra chân điều khiển sẽ được set xuống 0. Ưu điểm của giải thuật này là dễ dàng cập nhật các số dùng để so sánh ( tức các góc quay mong muốn của động cơ ) . Nhưng khi chạy nhiều động cơ vì có nhiều so sánh diễn ra mà hàm ngắt dùng để tăng biến đếm lại có thời gian khá nhỏ nên sẽ làm cho ngõ ra điều khiển động cơ sai lệch , không chính xác . Điều này khiến các động cơ sẽ bị rung lắc tại vị trí mong muốn.
Dùng module PWM của vi điềukhiển : đây là phương án cho ra xung ổn định nhất đồng thời dễ dàng cho việc cập nhật các giá trị điều khiển . Nhưng bắt buộc ta phải sử dụng kênh PWM với độ phân giải tối thiểu là 10 bits để đạt độ mịn tương đối chấp nhận được khi thay đổi các góc quay của động cơ . Vì bản chất xung điều khiển là các xung có chu kỳ lớn mà duty cycle lại bé ( nhỏ hơn 10%) nên độ phân giải của kênh PWM phải lớn để mới thỏa mãn được 2 điều trên .







