ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ CHẾ TẠO MÁY IN 3D PRUSA I3 file CAD 2D, XÂY DỰNG THƯ VIỆN BÀI TẬP
NỘI DUNG ĐỒ ÁN
MỤC LỤC ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ CHẾ TẠO MÁY IN 3D PRUSA I3 file CAD 2D, XÂY DỰNG THƯ VIỆN BÀI TẬP
LỜI NÓI ĐẦU.. 1
LỜI CẢM ƠN.. 2
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN.. 3
NHẬN XÉT CỦA HỘI ĐỒNG CHẤM ĐỒ ÁN.. 4
PHẦN 1: THIẾT KẾ CHẾ TẠO MÁY IN 3D.. 5
CHƯƠNG I: TỔNG QUAN NGHIÊN CỨU ĐỀ TÀI. 5
1.1. Đặt vấn đề. 5
1.2. Một số công nghệ in 3D.. 7
1.2.1. Công nghệ SLA.. 7
1.2.2. Công nghệ in 3DP. 8
1.3 Giới thiệu một số mẫu máy in 3D.. 10
1.3.1 Máy in Prusa I3. 10
1.3.2. Máy Delta Kossel10
1.3.3. Máy Ember12
1.4. Kết luận. 13
CHƯƠNG II CƠ SỞ LÝ THUYẾT.. 14
2.1. Khái quát chung về máy in 3D.. 14
2.2 Động cơ bước. 17
2.2.2 Động cơ bước biến từ trở. 19
2.2.3 Động cơ bước hỗn hợp. 20
2.2.4 Động cơ bước 2 pha. 21
2.3 Truyền động vitme – đai ốc. 22
2.3.2 Cơ cấu vitme – đai ốc bi23
2.4 Ray trượt dẫn hướng. 24
2.5 Truyền động đai25
2.6 Kết luận. 26
CHƯƠNG III: PHƯƠNG HƯỚNG VÀ CÁC GIẢI PHÁP. 27
3.1 Thông số máy. 27
3.2 Các phương án thiết kế kết cấu máy. 27
3.2.1 Phương án 1. 27
3.2.2 Phương án 2. 27
3.2.3 Phương án 3. 28
3.3 Lựa chọn phương án. 28
3.4 Trình tự thực hiện. 28
CHƯƠNG IV: TÍNH TOÁN THIẾT KẾ MÁY.. 29
4.1 Thiết kế khung máy. 29
4.2 Thiết kế cơ khí31
4.3 Lựa chọn tính toán động cơ. 33
4.3.1 Lựa chọn động cơ. 33
4.4.2 Tính toán. 34
4.4.3 Tính toán trục X.. 34
4.4.4 Tính toán trục Y.. 35
4.4.5 Tính toán trục Z. 36
4.4.6 Tính toán công suất động cơ. 37
4.3 Lựa chọn hệ thống điều khiển. 39
4.3.1 Mạch arduino mega 2560. 39
4.3.2 Mạch ramps 1.4. 42
4.3.3 Mạch driver điều khiển động cơ bước a4988. 44
4.3.4 Bộ điều khiển, hiển thị LCD.. 45
4.3.6 Đầu phun gia nhiệt45
4.3.5 Cảm biến nhiệt đồ đầu in và bàn nhiệt47
4.3.7 Nguồn tổ ong. 48
4.3.8 Bàn nhiệt49
CHƯƠNG V: CHẾ TẠO THỬ NGHIỆM... 51
5.l lắp đặt hệ thống điều khiển. 51
5.2 Thiết kế gia công các chi tiết gá đỡ. 54
5.3 Lắp ráp. 56
5.4 Mô hình thực tế. 58
5.5 Thiết lập nạp code điều khiển cho máy in 3D.. 58
5.5.1 Thiết lập firmware marlin. 58
5.2.2 Các thông số cài đặt Firmware cho máy in. 63
5.6 Một số sản phẩm in được từ máy. 65
CHƯƠNG VI: HƯỚNG DẪN SỬ DỤNG, BẢO DƯỠNG MÁY.. 67
6.1 Hướng dẫn sử dụng. 67
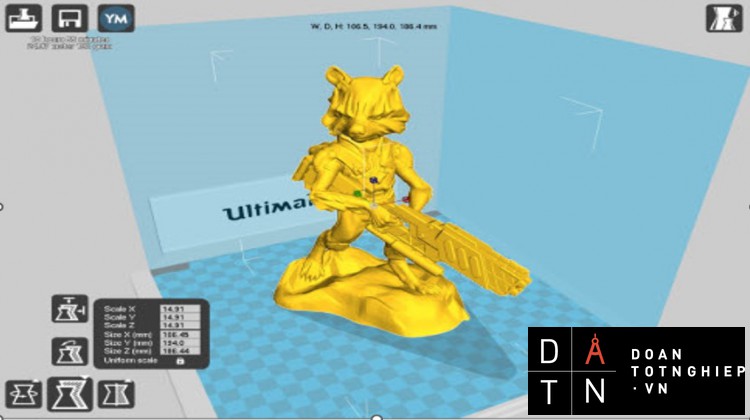
6.1.1 Dựng hình 3D và xuất file định dạng STL. 67
6.1.2 Nạp file STL và hiệu chỉnh in 3D bằng phần mêm Cura. 67
6.1.3 Hướng dẫn cân bằng bàn nhiệt85
6.2 Bảo dưỡng máy. 89
6.2.1 Vị trí đặt máy. 89
6.2.2 Làm vệ sinh cho máy. 89
6.3 Một số lỗi và cách khác phục. 90
6.3.1 Sản phẩm bị tách lớp. 90
6.3.2 Sản phẩm bị Cong vênh. 90
KẾT LUẬN – KIẾN NGHỊ. 92
PHẦN 2: XÂY DỰNG THƯ VIỆN BÀI TẬP THIẾT KẾ 3D.. 94
1 Thư viện bài tập thiết kế 3D là gì?. 94
2 Phương án và mục tiêu chọn bài tập thiết kế 3D cho thư viện. 94
3 Xây dựng dữ liệu cho thư viện. 94
3.1 Dựng lại mô hình 3D.. 94
3.2 Một số hình vẽ mẫu. 97
3.3 Nạp dữ liệu cho thư viện. 99
4 Kết luận. 101
TÀI LIỆU THAM KHẢO.. 102
LỜI NÓI ĐẦU
Ở các nước phát triển trên thế giới, sự đột phá về khoa học kỹ thuật đã giúp họ tìm ra những kỹ thuật tiên tiến áp dụng trong sản xuất, chế tạo.Đến thời điểm hiện nay, việc ứng dụng kỹ thuật trong cuộc sống, công việc cũng như nhiều lĩnh vực khác đã và đang được áp dụng phổ biến rộng rãi hơn. Xu hướng công nghệ dù đi tới đâu cũng đều nhằm phục vụ và cải thiện đời sống con người, trong đó, sẽ có những công nghệ và phát minh có thể thay đổi toàn diện cuộc sống con người.
Những xu hướng công nghệ sẽ thay đổi cuộc sống tương lai:
+ Trí tuệ nhân tạo–Robot.
+ Công nghệ nano và khoa học vật liệu.
+ Công nghệ in 3D.
+ Công nghệ pin và sạc không dây.
+ Màn hình cong.
+ Smart home.
+ Điện toán đám mây.
+Thương mại điện tử.
+ Thực tế ảo.
Công nghệ in 3D là một trong những xu hướng phát triển của khoa học kỹ thuật, đang thu hút sự chú ý của hàng loạt các nước trên thế giới. Công nghệ in 3D hiện giờ đã không còn quá xa lạ với giới chuyên môn và người sử dụng trên toàn thế giới. Vậy công nghệ in 3D là gì và tại sao nó đem lại nhiều lợi ích đến vậy ?
LỜI CẢM ƠN
Khi hoàn thành đồ án tốt nghiệp này cũng là lúc nhóm gần kết thúc thời gian học tập tại trường. Khoảng thời gian học tập và nghiên cứu tại Trường đã giúp cho nhóm hiểu và yêu quý nơi đây nhiều hơn. Nhà trường và Thầy Cô không những truyền đạt cho nhóm những kiến thức chuyên môn mà còn giáo dục cho em về lý tưởng, đạo đức trong cuộc sống. Đây là những hành trang không thể thiếu cho cuộc sống và sự nghiệp của nhóm sau này. Nhóm xin bày tỏ lòng biết ơn sâu sắc đến tất cả các Quý Thầy Cô đã tận tình chỉ bảo, dẫn dắt nhóm đến ngày hôm nay để có thể vững bước trên con đường học tập và làm việc sau này.
Đồ án tốt nghiệp đã đánh dấu việc hoàn thành những năm tháng miệt mài
học tập của nhóm. Và đồ án này cũng đánh dấu sự trưởng thành trên con đường học tập của nhóm. Qua đây nhóm xin gửi lời cảm ơn đến gia đình và bạn bè đã luôn động viên và tạo mọi điều kiện để nhóm hoàn thành khóa học.
Nhóm xin bày tỏ lòng biết ơn sâu sắc nhất đến Thầy Nguyễn Thoại Khanh với sự nhiệt tình giúp đỡ, tạo điều kiện thuận lợi và sự định hướng đúng đắn và kịp thời của Thầy đã giúp nhóm rất nhiều trong quá trình thực hiện đồ án.
Chúng em xin chân thành cám ơn quý thầy cô khoa cơ khí và các cán bộ công nhân viên trường đã tạo điều kiện thuận lợi để nhóm em có thể hoàn thành tốt đồ án tốt nghiệp này.
Nhóm em xin chân thành cảm ơn công ty TNHH Kỹ Nghệ NESTO đã tài trợ cho đồ án của nhóm em.
PHẦN 1: THIẾT KẾ CHẾ TẠO MÁY IN 3D
CHƯƠNG I: TỔNG QUAN NGHIÊN CỨU ĐỀ TÀI
1.1. Đặt vấn đề
Công nghệ in 3D đang là một trong những xu hướng phát triển mới của khoa học và kỹ thuật hiện đại. Hiện nay trên thếgiới, công nghệ in 3D đã được ứng dụng trong việc tạo sảnphẩm phục vụ đời sống-xã hội. Một số sản phẩm được tạobằng công nghệ in 3D trong một số lĩnh vực như thiết kế thờitrang, linh kiện thay thế, thực phẩm, công nghiệp, xây dựngvà y học.
Trong các ứng dụng đó thì việc tạo mô hình 3D trực quanđể phục vụ đào tạo, tạo mẫu thiết kế được chú trọng, một số mô hình 3D được tạo bằng máy in 3D dùng để phục vụ đào tạođược thể hiện như in các chi tiết đồ gá (hình 1-1), các chi tiết hình hộp giảm tốc (hình 1-2).
Công nghệ in 3D là một công nghệ tạo mẫu tiên tiến. Các sản phẩm máy in thương mại được sản xuất không những bởi các công ty, tập đoàn như 3D system, Stratasys, Z Corporation mà còn bởi các trường đại học như Đại học Cardiff ở nước Anh. Tại Phòng thí nghiệm sản xuất phụ trợ, Đại học Cardiff, các nghiên cứu về máy in cho các sản phẩm bằng nhựa và kim loại đã được nghiên cứu từ những năm 90 của thế kỷ XX.
Tại Việt Nam, các nghiên cứu về tạo mẫu để ứng dụng trong công nghiệp đã được chú trọng, nhiều tác giả, cơ sở sản xuất đã đề xuất nghiên cứu chế tạo máy in 3D như nhóm nghiên cứu thuộc Bộ môn Cơ khí chính xác và quang học (Trường Đại học Bách khoa Hà Nội) đã thiết kế chế tạo thử nghiệm thành công máy in chi tiết nhựa 3D. Máy in 3D 3DMaker® GEM do Công ty cổ phần 3Dmaker (TP Hồ Chí Minh) thiết kế và chế tạo dựa theo công nghệ in 3D-DLP.
Công nghệ in 3D hỗ trợ rất nhiều cho người thiết kế và những nhà sản xuất có thể kiểm tra các chi tiết hay hệ thống được thiết kế trước khi được cấp vốn để sản xuất hàng loạt. Các công nghệ in 3D đã giúp các nhà sản xuất đẩy mạnh việc thiết kế sản phẩm, hạn chế các sai sót không đáng có trong quá trình thiết kế và sản xuất.
Về cơ bản công nghệ in 3D là quá trình tạo mẫu sản phẩm giúp người sản xuất quan sát nhanh sản phẩm cuối cùng. Quá trình tạo mẫu được hỗ trợ bởi các phần mềm CAD giúp thiết kế nhanh sản phẩm, các phần mềm cắt lớp. Tạo đường chuyển động.
Đặc điểm của công nghệ in 3D là:
- Thực hiện tạo mẫu trong thời gian ngắn, đây chính là điểm mạnh của phương pháp này.
- Sản phẩm của quá trình in có thể dùng để kiểm tra các mẫu được sản xuất bằng các phương pháp khác.
- Mẫu tạo ra có thể dùng hỗ trợ cho quá trình sản xuất.
1.2. Một số công nghệ in 3D
1.2.1. Công nghệ SLA
|
Hình 1-3: Sơ đồ nguyên lý tạo mẫu SLA |
Công nghệ SLA được phát minh ở Mỹ vào năm 1984. Phương pháp tạo mẫu lập thể SLA dựa vào nguyên tắc đông cứng vật liệu lỏng photopolymer thành hình dạng rõ ràng khi nó được chiếu bởi một chùm tia laser cường độ cao. Có thể sử dụng Laser He-Cd với bước sóng 325nm hoặc Laser dạng rắn.
Tại vị trí bệ đỡ cao nhất thì trên tấm là một lớp chất lỏng cạn. Máy phát laser phát ra chùm tia cực tím tập trung trên một diện tích của lớp chất lỏng và di chuyển theo hướng X – Y.
Chùm tia cực tím chiếu sáng làm đông đặc lớp dung dịch tạo nên một khối đặc, bệ đỡ được hạ xuống một khoảng bằng chiều dày 1 lớp và quá trình được lặp lại.
Quá trình được tiếp diễn cho đến khi đạt được kích thước của chi tiết. Phần dung dịch xung quanh không bị đông kết và có thể được sử dụng cho lần kế tiếp.
1.2.2. Công nghệ in 3DP
Công nghệ in chiều được phát triển ở khoa kỹ thuật cơ khí viện công nghệ MIT.
|
Hình 1-4: Sơ đồ nguyên lý tạo mẫu 3DP |
Đầu phun sẽ phun dung dịch keo kế dính trên bề mặt lớp nền bột vật liệu chế tạo. Bột sẽ kết dính với nhau ở những vị trí có keo dính. Sau khi lớp đầu tiên hoàn thành piston chế tạo sẽ đi xuống một khoảng bằng bề dày một lớp. Piston phân phối bột đi lên, con lăn chạy qua đẩy bột cung cấp tiếp tục cho quá trình. Quá trình được lặp lại cho đến khi toàn bộ vật thể được chế tạo xong trong nền bột
1.2.3. Công nghệ FDM
|
Hình 1-5: Sơ đồ nguyên lý tạo mẫu FDM |
Công nghệ in FDM được sử dụng khá nhiều trong các loại máy in hiện nay với kết cấu đơn giản, vật liệu dễ tìm.
Nguyên lý hoạt động:
Ở vị trí ban đầu bàn in cách đầu phun nhiệt một khoảng bằng chiều dày lớp in. Sợi nhựa được đưa vào kim phun nhờ hệ thồng tời nhựa bằng cặp bánh răng một cách liên tục. Tại đầu phun nhựa, nhựa được nung nóng tới khoảng nhiệt độ thích hợp bởi bộ phận gia nhiệt. Nhựa nóng chảy được đùn ra theo biên dạng dịch chuyển của đầu phun. Sau khi lớp thứ nhất hoàn thành bàn máy dịch xuống một khoảng bằng chiều dày một lớp. Quá trình tiếp tục cho đến khi hoàn thành chi tiết.
1.3 Giới thiệu một số mẫu máy in 3D
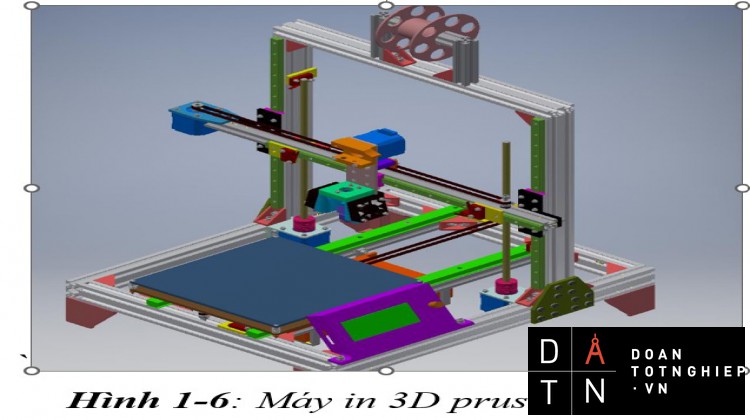
1.3.1 Máy in Prusa I3
|
Hình 1-6: Máy in 3D prusa I3 |
Được phát triển từ những năm 2010 bởi Josef Prusa. Đây là một trong những mẫu máy in 3D công nghệ FDM khá phổ biến trên thị trường hiện nay. Mức giá của loại máy này giao động từ 4 triệu đến 6 triệu. Ưu điểm của loại máy này là kết cấu đơn giản, dễ lắp ráp.
1.3.2. Máy Delta Kossel
Được phát triển bởi Johann tại Seatle, Mỹ vào năm 2012. Dòng máy này sử dụng cơ cấu delta, công nghệ in FDM, loại nhựa thường được sử dụng là nhựa ABS, PLA.
|
Hình 1-7: Máy in 3D Delta Kossel |
Bảng 1.1: Thông số máy in 3D Delta Kossel
|
Loại máy |
Delta |
|
Tốc độ in |
320 mm/s |
|
Độ phân giải động cơ |
100 step/mm |
|
Không gian in |
Đường kính in 170 mm, chiều cao 240 mm |
|
Độ phân giải mỗi lớp in |
0.2 mm |
|
Giá |
600USD |
Ưu điểm của mẫu máy này là máy hoạt động êm, ít rung, tốc độ và độ chính xác cao có thể in được vật thể có chiều cao lớn, cơ cấu có độ cứng vững cao. Bên cạnh những ưu điểm đó là những nhược điểm như khổ máy lớn, cồng kềnh, kết cấu phức tạp, khó căn chỉnh, giá thành đắt hơn so với dòng máy Prusa.
1.3.3. Máy Ember
Máy ember được phát triển bởi công ty Autodesk năm 2015. Đây là dòng máy in sử dụng công nghệ SLA, sử dụng vật liệu là loại nhựa lỏng.
|
Hình 1-8: Máy in 3D Ember |
Bảng 2.2: Thông số máy in 3D Ember
|
Độ phân giải trục XY |
50micron |
|
Độ phân giải trục Z |
10 – 100 micron. |
|
Không gian in |
64x40x134 mm. |
|
Tốc độ in |
18 mm/h. |
|
Loại nhựa |
Acrylate photosensitive resin. |
|
Kích thước máy |
325 x 340 x 434 mm. |
|
Giá thành |
7495USD bao gồm nhựa lỏng. |
Ưu điểm của dòng máy là độ phân giải của máy cao, độ chính xác cao, kích thước máy nhỏ gọn, chi tiết sau khi in có độ cứng cao, độ bóng bề mặt cao
Nhược điểm của máy là giá thành cao, tốc độ in thấp.
1.4. Kết luận
Chương này đã giới thiệu một số công nghệ in 3D và một số mẫu máy in 3D điển hình và được sử dụng khá phổ biến trên thị trường hiện này từ đó làm tiền đề cho việc lựa chọn kế cấu và công nghệ in sử dụng trong đồ án.
CHƯƠNG II CƠ SỞ LÝ THUYẾT
2.1. Khái quát chung về máy in 3D
Máy in 3D đầu tiên ra đời vào những năm 80 là những dòng máy in 3D SLA đầu tiên trên thế giới. Về cơ bản mọi máy in 3D đều có kết cấu cơ khí gần giống nhau, chỉ khác nhau về bộ phận tạo mẫu. Xét về tổng quan các máy in 3D FDM có kết cấu gồm 3 phần chính: phần mềm điều khiển, phần điện, phần cơ khí, bộ đùn nhựa.
Cấu trúc cơ khí của một máy in 3D gần giống với các loại máy CNC với truyền động của các trục. Bộ truyền có thể là bộ truyền vít me – đai ốc hoặc bộ truyền đai. Đặc điểm của truyền động cơ khí trong máy in 3D là tải trọng tác dụng lên không đáng kể do đó việc thiết kế tương đối đơn giản, kết cấu các trục tương đối gọn nhẹ, các chi tiết lắp ráp không đòi hỏi về khả năng chịu lực không cao do đó có thể sử dụng các chi tiết in được bằng các máy khác để lắp ráp. Đó cũng là một ưu điểm của các máy in 3D. Một số dòng máy in 3D có khoảng 80% các chi tiết lắp ráp là được in bằng các máy in 3D sẵn có.
Phần điện của máy in 3D có thể chia thành 2 khối: khối điều khiển và khối chấp hành. Khối điều khiển gồm các thành phần như: Vi điều khiển, Board kết nối, LCD, Driver,…
Khối chấp hành gồm các thành phần như: động cơ bước, các cảm biến nhiệt độ, động cơ servo (nếu có), tản nhiệt, ….
Bộ đùn nhựa là một trong những phần quan trọng nhất trong máy. Bộ phận này thực hiện 2 chức năng trong máy: bộ tời nhựa cung cấp nhựa chạy liên tục, đầu phun nhựa thực hiện chức năng nung chảy nhựa và đùn nhựa tạo nên mẫu. Phần mềm được chia làm 2 thành phần: phần mềm CAD/CAM, phần mềm điều khiển. Phần mềm CAD là các phần mềm có chức năng tạo mẫu 3D, đây là các mô hình sẽ được in trên máy in 3D. Các phần mềm CAD được sử dụng có thể là Inventor, Solidwork, Creo, Sketchup,…. Các mô hình 3D sau khi được tạo ra phải được chuyển đổi sang định dạng STL từ đó có thể đưa sang các phần mềm CAM để xử lý tiếp theo. Các phần mềm CAM là các phần mềm thực hiện các chức năng cắt lớp vật thể do công nghệ in 3D là in theo từng lớp, lớp cắt càng có kích thước nhỏ thì chất lượng mẫu in càng tốt tuy nhiên thời gian in sẽ tăng lên và ngược lại, lớp in càng lớn thì chất lượng giảm và tốc độ in tăng lên. Để tối ưu hóa giữa chất lượng in và tốc độ in thì phải có cài đặt các thông số in hợp lý.
Các phần mềm CAM được sử dụng phổ biến cho máy in 3d là Cura, Slic3r, Simplify,…. Một số phần mềm sẽ tích hợp các module CAM và module điều khiển trong một, giúp công việc sử lý mẫu in nhanh hơn và đạt hiệu quả hơn như phần mềm Repertier host. Phần mềm này tích hợp các công cụ CAM là Slic3r, Cura, Skeinforge, có thể lựa chọn sử dụng một trong ba module để so sánh từ đó lựa chọn module tốt hơn cho từng kiểu mẫu in khác nhau.
Để máy hoạt động ta phải nạp Gcode cho máy. Có thể nạp Gcode thông qua phần mềm điều khiển hoặc nạp qua thẻ nhớ trên màn hình LCD điều khiển. Phần mềm giao diện điều khiển được sử dụng có thể là Repertier Host hoặc Pronterface.
Để tối ưu hóa giữa chất lượng in và tốc độ in thì phải có cài đặt các thông số in hợp lý. Sau khi cắt lớp phần mềm sẽ tạo chuyển động khi in và xuất file Gcode. Các mã lệnh Gcode hầu hết giống với gcode trên máy CNC tuy nhiên có một số mã lệnh riêng đối với máy in 3D.
Dưới đây là một số tập lệnh thường dùng với máy in 3D:
|
G2/G3 |
G2/G3 Xnnn Ynnn Znnn Ennn Fnnn |
Di chuyển theo cung tròn, đường tròn |
|
G17, G18, G19 |
|
Lựa chọn mặt phẳng in |
|
G21 |
|
Đặt đơn vị theo hệ mét |
|
G20 |
|
Đặt đơn vị theo hệ Inch |
|
G28 |
G28 X Y Z |
Về home |
|
G90 |
|
Sử dụng tọa độ tuyệt đối |
|
G91 |
|
Sử dụng tọa độ tương đối |
|
M18 |
M18 X Y Z E0 |
Vô hiệu các trục |
|
M21 |
|
Cài đặt thẻ nhớ |
|
M24 |
|
Bắt đầu/ tiếp tục in từ thẻ nhớ |
|
M104 |
M104 Ennn |
Cài đặt nhiệt độ đầu phun |
|
M106 |
|
Bật quạt tản nhiệt |
|
M107 |
|
Bật quạt tản nhiệt |
|
M114 |
|
Lấy tọa độ vị trí hiện tại |
|
M119 |
|
Trả về trạng thái endstop |
|
M120 |
|
Bật endstop |
|
M121 |
|
Tắt endstop |
|
M140 |
M140 Snn |
Set nhiệt độ bàn nhiệt |
|
M150 |
M150 Rnnn Unnn Bnnn |
Thiết lập màu hiển thị |
|
M190 |
M190 Snn |
Đợi đến khi bàn nhiệt đạt đến nhiệt độ được set (dùng khi gia nhiệt nhựa) |
|
M200 |
M200 Dxx |
Cài đặt đường kính sợi nhựa |
|
M201 |
M201 Xnnn Ynnn Znnn Ennn |
Cài đặt gia tốc in tối đa |
2.2 Động cơ bước
Động cơ bước (stepper motor), thực chất là một động cơ đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay.
Về cấu tạo động cơ bước gồm có các bộ phận là stato, roto là nam châm vĩnh cửu hoặc trong trường hợp của động cơ biến từ trở là những khối răng làm bằng vật liệu nhẹ có từ tính. Động cơ bước được điều khiển bởi bộ điều khiển bên ngoài. Động cơ bước và bộ điều khiển được thiết kế sao cho động cơ có thể giữ nguyên bất kỳ vị trí cố định nào cũng như quay đến một vị trí bất kỳ nào.
Động cơ bước có thể sử dụng trong hệ thống điều khiển vòng hở đơn giản, hoặc vòng kín, tuy nhiên khi sử dụng động cơ bước trong hệ điều khiển vòng hở khi quá tải, tất cá các giá trị của động cơ đều bị mất và hệ thống cần nhận diện lại.
Một số đặc điểm của động cơ bước:
Động cơ bước hoạt động dưới tác dụng của các xung rời rạc và kế tiếp nhau. Khi có dòng điện hay điện áp đặt vào cuộn dây phần ứng của động cơ bước làm cho roto của động cơ quay một góc nhất định gọi là bước của động cơ. Góc bước là góc quay của trục động cơ tương ứng với một xung điều khiển. Góc bước được xác định dựa vào cấu trúc của động cơ bước và phương pháp điều khiển động cơ bước.
Tính năng mở máy của động cơ được đặc trưng bởi tần số xung cực đại có thể mở máy mà không làm cho roto mất đồng bộ.
Chiều quay động cơ bước không phụ thuộc vào chiều dòng điện mà phụ thuộc vào thứ tự cấp xung cho các cuộn dây.
Động cơ bước được chia thành 3 loại chình là:
- Động cơ bước biến từ trở.
- Động cơ bước nam châm.
- Động cơ bước hỗn hợp/lai.
2.2.1 Động cơ bước nam châm vĩnh cửu
Động cơ bước nam châm vĩnh cửu có roto là nam châm vĩnh cửu, stato có nhiều răng trên mỗi răng có quấn các vòng dây. Các cuộn dây pha có cực tính khác nhau.
Nguyên lý hoạt động của động cơ bước nam châm vĩnh cửu có 2 cặp cuộn pha được trình bày ở hình:
Ban đầu vị trí của stato và roto đang ở phase A. Khi cấp điện cho 2 cuộn dây pha B và D trong 2 cuộn sẽ xuất hiện cực tính. Do cực tính của cuộn dây pha và roto ngược nhau dẫn đến roto chuyển động đến vị trí như hình phase B on. Khi cuộn dây pha B và D ngắt điện cuộn dây A và B được cấp điện thì roto lại chuyển động đến vị trí như hình phase C on.
2.2.2 Động cơ bước biến từ trở
Động cơ bước biến từ trở có cấu tạo giống với động cơ bước nam châm vĩnh cửu. Cấu tạo của stato cũng có các cuộn pha đối xứng nhau, nhưng các cuộn pha đối xứng có cùng cực tính khác với động cơ bước nam châm vĩnh cửu.
Roto của động cơ bước biến từ trở được cấu tạo từ thép non có khả năng dẫn từ cao, do đó khi động cơ mất điện roto vẫn tiếp tục quay tự do rồi mới dừng hẳn.
Nguyên lý hoạt động của động cơ bước biến từ được thể hiện như hình:
Khi cấp điện cho pha A (hình a), từng cặp cuộn dây A bố trí đối xứng nhau có cùng cực tính là nam (S) và bắc (N). Lúc này các cuộn dây hình thành các vòng từ đối xứng.
Khi cấp điện cho pha B (hình b). Lúc này từ trở trong động cơ lớn, momen từ tác động lên trục roto làm cho roto quay theo chiều giảm từ trở. Roto quay cho tới khi từ trở nhỏ nhất và khi momen bằng không thì trục động cơ dừng, roto đạt đến vị trí cân bằng mới.
Tương tự như vật khi cấp điện cho pha C, động cơ hoạt động theo nguyên tắc trên và roto ở vị trí như hình c. Quá trình trên lặp lại và động cơ quay liên tục theo thứ tự pha A B C. Để động cơ quay ngược chiều chỉ cần cấp điện cho các pha theo thứ tự ngược lại.
2.2.3 Động cơ bước hỗn hợp
Động cơ bước hỗn hợp (còn gọi là động cơ bước lai) có đặc trưng cấu trúc của động cơ bước nam châm vĩnh cửu và động cơ bước biến từ. Stato và roto có cấu tạo tương tự động cơ bước biến từ trở nhưng số răng của stato và roto không bằng nhau. Roto của động cơ bước thường có 2 phần: phần trong là nam châm vĩnh cửu được gắn chặt lên trục động cơ, phần ngoài là 2 đoạn roto được chế tạo từ lá thép non và răng của 2 đoạn roto được đặt lệch nhau.
Động cơ bước hỗn hợp được sử dụng rộng rãi vì kết hợp các ưu điểm của 2 loại động cơ trên là động cơ bước nam châm vĩnh cửu và động cơ bước biến từ trở.
2.2.4 Động cơ bước 2 pha
Hiện nay các động cơ bước 2 pha được sử dụng rất thông dụng, có kết cấu như động cơ bước hỗn hợp và động cơ bước nam châm vĩnh cửu. Tuy nhiên động cơ bước 2 pha còn được phân loại dựa vào cách đấu dây các cặp cực.
Động cơ bước đơn cực: cuộn dây pha có ba dây đầu ra. Điểm trung tâm của cuộn dây được đấu ra ngoài. Khi cấp điện, dây trung tâm được nối với đầu dương của nguồn điện, hai đầu dây còn lại được nối với đầu âm.
Động cơ bước lưỡng cực: cuộn dây pha của loại động cơ này chỉ có 2 đầu ra. Một đầu dây được nối với nguồn dương và đầu còn lại được nối với đầu âm của nguồn điện. Động cơ bước lưỡng cực có kết cấu đơn giản nhưng điều khiển phức tạp hơn động cơ bước đơn cực.
|
Hình 2-5: Động cơ bước 2 pha lưỡng cực và đơn cực |
2.3 Truyền động vitme – đai ốc
Vít me – đai ốc là cơ cấu truyền động biến truyền động quay thành chuyển động tịnh tiến. Truyền động vít me – đai ốc có 2 loại là vít me - đai ốc trượt và vít me đai ốc bi.
2.3.1 Cơ cấu vitme – đai ốc trượt
|
Hình 2-6: Vitme đai ốc |
Cơ cấu vít me – đai ốc trượt có những đặc điểm:
- Độ chính xác truyền động cao, tỷ số truyền lớn.
- Truyền động êm, có khả năng tự hãm, lực truyền lớn.
- Có thể truyền động nhanh với vít me có bước ren hoặc số vòng quay lớn.
- Hiệu suất truyền động thấp nên ít dùng để thực hiện những chuyển động chính.
Kết cấu vít me – đai ốc:
Dạng ren: Vít me thường có 2 dạng ren chủ yếu là :
Ren có dạng hình thang với góc 30º có ưu điểm: gia công đơn giản, có thể phay hoặc mài. Nếu dùng với đai ốc hai nửa thì có thể đóng mở lên ren dễ dàng.
Ren có hình dạng vuông chỉ dùng ở những máy cắt ren chính xác và máy tiện hớt lưng.
Về mặt kết cấu nên chế tạo vít me với 2 cổ trục giống như nhau để sau một thời gian sử dụng, có thể lắp đảo ngược vít me lại nhằm làm cho bề mặt làm việc của vít me được mòn đều ở 2 bên
Ổ đỡ vít me: ổ đỡ vít me có tác dụng đảm bảo cho trục chuyển động với độ đảo hướng trục và độ hướng kính nhỏ.
Đai ốc vít me:
Đai ốc liền: dùng trong cơ cấu vít me – đai ốc có chế độ làm việc ít, không yêu cầu độ chính xác cao, giữa các ren có thể có độ hở nhất định.
Ưu điểm của đai ốc liền là đơn giản, giá thành thấp, có thể tự hãm ở mức độ nhất định.
2.3.2 Cơ cấu vitme – đai ốc bi
|
Hình 2-7: Vitme - đai ốc bi |
Cơ cấu vít me đai ốc bi có những đặc điểm sau :
- Tổn thất ma sát ít nên có hiệu suất cao, có thể đạt từ 90 – 95 %.
- Lực ma sát gần như không phụ thuộc vào tốc độ chuyển động nên đảm bảo chuyển động ở những vận tốc nhỏ.
- Hầu như không có khe hở trong mối ghép và có thể tạo ra lực căng ban đầu, đảm bảo độ cứng vững hướng trục cao.
Vì những ưu điểm đó vít me đai ốc bi thường được sử dụng cho những máy cần có truyền động thẳng chính xác như máy khoan, doa tọa độ, các máy điều khiển chương trình số.
2.4 Ray trượt dẫn hướng
Ray trượt dẫn hướng có 2 chức năng cơ bản:
- Dùng để dẫn hướng cho các bộ phận máy như bàn máy, các cụm trục,… theo một quỹ đạo hình học cho trước.
- Định vị đúng các bộ phận tĩnh
Do vậy, sống trượt cần có các yêu cầu sau :
- Đảm bảo độ chính xác tĩnh và độ chính xác di chuyển cho các bộ phận lắp trên đó. Yêu cầu này chủ yếu phụ thuộc vào độ chính xác gia công ray trượt, cách bố trí ray trượt phù hợp bề mặt chịu lực. Bố trí sao cho lực tác dụng lên ray trượt là nhỏ nhất và biến dạng ray trượt là ít nhất.
- Bề mặt làm việc phải có khả năng chịu mòn cao để đảm bảo độ chính xác lâu dài. Yêu cầu này phụ thuộc vào độ cứng bề mặt của ray trượt, độ bóng bề mặt của sống trượt, chế độ bôi trơn và bảo quản ray trượt.
- Kết cấu ray trượt đơn giản, có tính công nghệ cao.
- Có khả năng điều chỉnh khe hở khi mòn.
Bảo vệ và bôi trơn ray trượt:
Bảo vệ ray trượt khỏi bụi bẩn, phoi, … cũng như bôi trơn hợp lý bề mặt ray trượt có tác dụng làm giảm độ mòn đáng kể của ray trượt và giữ được độ chính xác ban đầu của ray trượt.
Các phương pháp bảo vệ ray trượt thường dùng như :
- Lắp lá chắn bụi.
- Dùng các chổi quét, lau di động cùng bàn máy.
- Các biện pháp che đậy ray trượt.
Đồng thời với các biện pháp chống bụi là việc bôi trơn ray trượt hợp lý, thông thường đối với sống trượt tuyến tính hiện nay các nhà chế tạo đều có hướng dẫn bôi trơn cho từng dòng ray trượt để đảm bảo hiệu quả tốt nhất.
2.5 Truyền động đai
Bộ truyền đai là bộ truyền cơ khí được sử dụng sớm nhất và hiện nay vẫn được sử dụng rông rãi, có nhiều loại đai như đai thang, đai dẹt, đai răng,….
|
Hình 2-9: Bộ truyền động đai |
So với các bộ truyền khác bộ truyền đai có những ưu điểm như:
- Truyền động giữa các trục xa nhau.
- Làm việc êm và không ồn do độ bền và dẻo của đai do đó có thể truyền động với vận tốc cao.
- Tránh cho cơ cấu không có sự dao động nhờ vào sự trượt trơn của đai khi quá tải.
- Kết cấu và vận hành đơn giản.
Tuy nhiên nó cũng tồn tại những nhược điểm như:
- Hiệu suất bộ truyền thấp.
- Tỷ số truyền thay đổi do sự trượt đàn hồi giữa bánh đai và đai.
- Tuổi thọ đai thấp.
- Kích thước bộ truyền lớn.
- Tải trọng tác dụng lên trục lớn do phải căng đai ban đầu.
2.6 Kết luận
Trong chương này đã trình bày những vấn đề lý thuyết cơ bản về những thành phần sử dụng trong kết cấu máy của đồ án từ đó làm tiền để cho việc lựa chọn và thiết kế máy sau này
CHƯƠNG III: PHƯƠNG HƯỚNG VÀ CÁC GIẢI PHÁP
3.1 Thông số máy
- Không gian in tối đa: 200x200x200 mm
- Độ phân giải của một lớp in: từ 0.1 ~ 0.4 mm
- Dung sai cho phép ±0.1 mm.
- Tốc độ khi in 90 ~ 130 mm/s.
- Tốc độ tối đa 300 mm/s.
3.2 Các phương án thiết kế kết cấu máy
3.2.1 Phương án 1
Truyền động Cartesian – XZ
Trong kết cấu này bàn in sẽ dịch chuyển theo phương Y, đầu phun sẽ dịch chuyển theo phương XZ. 2 trục XY sử dụng bộ truyền đai, trục Z sử dụng bộ truyền vít me – đai ốc.
Ưu điểm của kết cấu này là:
- Độ chính xác cao
- Kết cấu đơn giản, dễ thi công
- Chi phí rẻ, độ cứng vững tương đối cao
Nhược điểm của nó là:
- Khó căn chỉnh bàn máy
- Do khối lượng các cơ cấu di động lớn nên quán tính lớn, dễ rung động.
3.2.2 Phương án 2
Sử dụng kết cấu robot delta, dùng truyền động đai. Kết cấu này có ưu điểm là:
- Các kết cấu di động nhỏ nên quán tính máy nhỏ, di chuyển êm
- Có thể in được vật có chiều cao lớn
- Thời gian in nhanh hơn kết cấu Cartesian – XZ
Tuy nhiên nhược điểm của loại máy này là:
- Khổ máy lớn, gây khó khăn cho quá trình di chuyển
- Khó căn chỉnh bàn máy
- Giá thành cao
3.2.3 Phương án 3
Truyền động Cartesian – XY
Trong kết cấu này bàn in sẽ dịch chuyển theo phương Z, đầu phun nhựa
dịch chuyển theo phương XY. 2 trục XY sử dụng bộ truyền đai theo cơ cấu CoreXY, trục Z sử dụng bộ truyền vít me đai ốc.
Ưu điểm của kết cấu này:
- Kết cấu đơn giản, dễ lắp đặt.
- Các kết cấu di động nhỏ nên quán tính nhỏ, máy hoạt động êm hơn.
Nhược điểm của kết cấu này:
- Khó căn chỉnh bàn in.
- Khổ máy lớn, cồng kềnh gây khó khăn cho quá trình di chuyển
- Chi phí cao
3.3 Lựa chọn phương án
Dựa vào những ưu điểm cũng như khuyết điểm của từng kết cấu như trên nhóm đã quyết đinh sử dụng phương án 1 – Cartersian XZ cho máy.
3.4 Trình tự thực hiện
- Tính toán thiết kế truyền động đai cho trục XY.
- Tính toán thiết kế truyền động vít me – đai ốc cho trục Z.
- Thiết kế, gia công các chi tiết máy.
- Lựa chọn, tính toán phần điện.
CHƯƠNG IV: TÍNH TOÁN THIẾT KẾ MÁY
4.1 Thiết kế khung máy
Đối với kết cấu khung máy dành cho máy in 3D, do không chịu tải trọng lớn nên nhóm quyết định thết kế khung máy bằng nhôm định hình nhằm tiết kiệm về giá cả, dễ tháo lắp và sửa chữa trong quá trình lắp máy.
Kích thước nhôm định hình sử dụng là 20x20 và 20x40 để khung máy nhỏ gọn.
|
Nhôm 20x40 mm |
|
Hình 4-1: Nhôm định hình |
Phương pháp gia công và lắp ráp khung máy:
Khung máy là bộ phận quan trọng, chịu lực lớn nhất và đảm bảo độ chính xác của máy nên yêu cầu độ chính xác khi gia công cao
Yêu cầu phải đảm bảo về kích thước của các thanh nhôm, độ vuông góc khi lắp ghép.
Các thanh nhôm định hình được cắt bằng máy cưa tay với dung sai 2 – 3mm, sau đó được đưa lên máy phay để phay phẳng 2 đầu nhằm đảm bảo kích thước và độ phẳng.
Các thanh nhôm được nối với nhau bằng bát ke góc nhôm và bu lông lục giác.
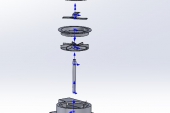
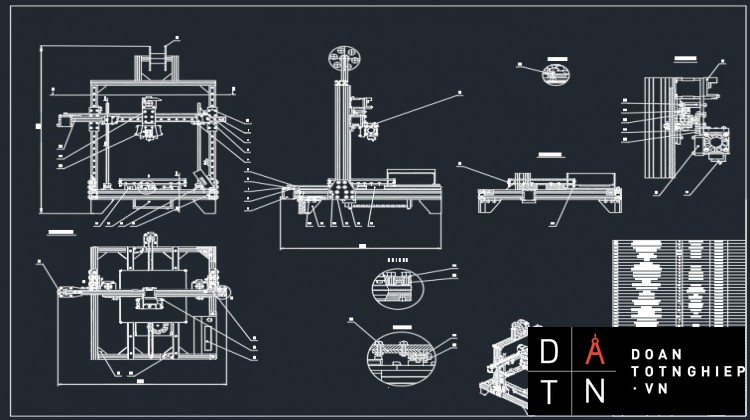
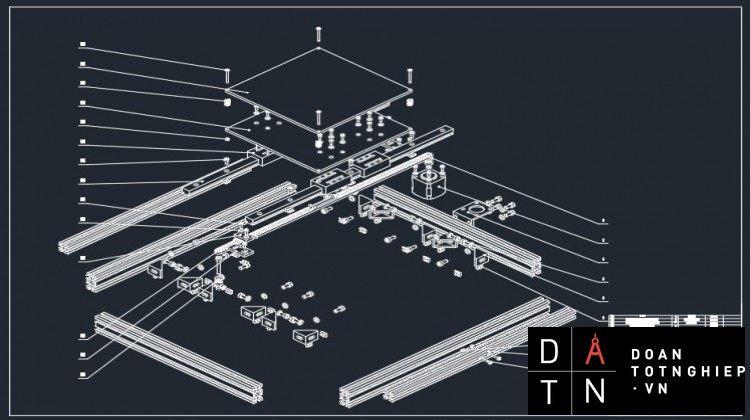
4.2 Thiết kế cơ khí
Máy gồm các bộ phận sau:
+ Với 3 trục chuyển động X, Y, Z trong đó: trục X chuyển động trên trục Z, trục Y chuyển động vuông góc với trục X, trục Z chuyển động tịnh tiến theo phương thẳng đứng so với trục Y.
+ Bàn nhiệt: được gắn cố định trên các mặt ray trượt của trục Y.
+ Đầu phun nhựa.
+ Bộ đùn nhựa
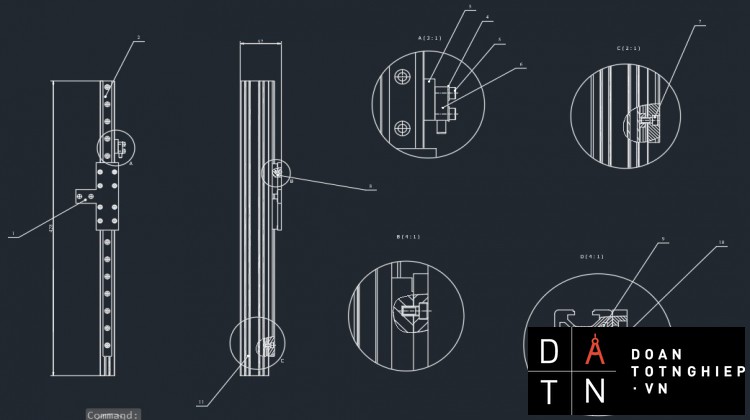
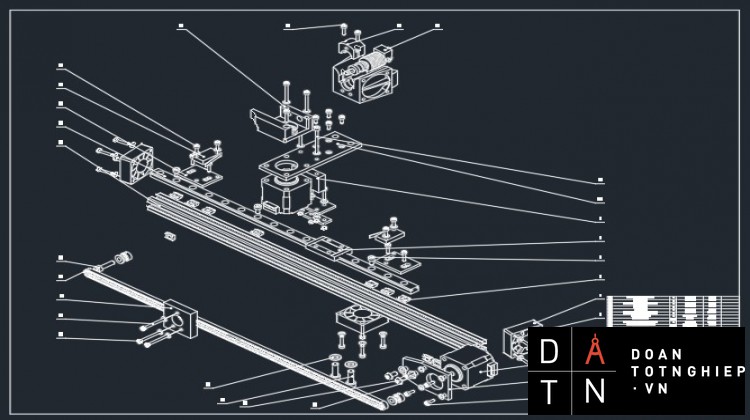
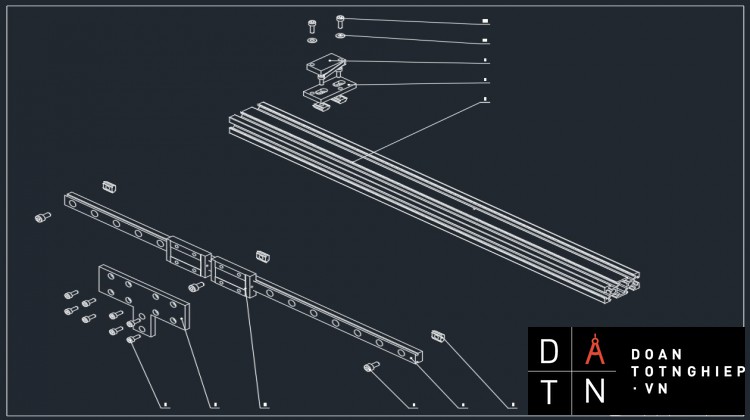
Các trục X, Y, Z có cấu tạo gồm các thành phần sau:
- Trục X gồm 2 phần: phần cố định và phần chuyển động.
|
Hình 4-3: Thành phần trục X |
+ Phần chuyển động là chuyển động trượt của con tượt trên 2 thanh trượt qua chuyển động dây đai.
- Đầu phun nhựa và bộ đùn nhữa được gắn trên mặt con trượt bằng pat nhôm chuyển động trượt trên trục X và lên xuống theo trục Z.
- Trục Y được gắn cố định trên bàn máy. Chuyển động trên trục Y là chuyển động của bàn nhiệt, bàn nhiệt được gắn trên mâm nhôm gắn liền với các mặt con trượt chuyển động trượt trên trục Y qua chuyển động dây đai.
|
Hình 4-4: Thành phần trục Y và bàn nhiệt |
- Trục Z gồm 2 phần: phần cố định và phần chuyển động.
|
Hình 4-5: Thành phần trục Z |
+ Phần chuyển động: là chuyển động vít me tịnh tiến theo phương thẳng đứng.
4.3 Lựa chọn tính toán động cơ
4.3.1 Lựa chọn động cơ
Để có thể điều khiển chính xác tọa độ, các loại động cơ được sử dụng chính hiện nay là: động cơ servo và động cơ bước.
4.3.1.1 Động cơ servo
Ưu điểm:
+ Momen trên trục lớn.
+ Tốc độ cao.
+ Mạch điều khiển tốc độ chính xác và đều.
+ Độ chính xác cao.
Nhược điểm:
+ Giá thành cao.
+ Không làm việc ở chế độ mạch điều khiển hở, yêu cầu phải có hệ thống phản hồi.
+ Yêu cầu phải điều chỉnh các thông số vòng điều khiển.
+ Bảo đưỡng tốn kém.
+ Phải có driver điều khiển riêng.
4.3.1.2 Động cơ bước
Ưu điểm:
+ Điều khiển vị trí, tốc độ chính xác, không cần mạch phản hồi.
+ Thường được sử dụng trong các hệ thống máy CNC.
+ Giá thành thấp.
+ Duy trì momen rất tốt, momen xoắn cao khi tốc độ thấp.
+ Có thể điều khiển mạch hở.
Nhược điểm:
+ Momen xoắn nhỏ, momen máy nhỏ.
+ Làm việc ồn.
+ Không có phản hồi nên có thể xảy ra các sai số.
Từ những ưu, nhược điểm của hai loại động cơ trên, không sử dụng động cơ servo vì phải có driver điều khiển riêng tốn chi phí và giá thành động cơ cao không phù hợp với máy in 3D giá rẻ. Do vậy động cơ lựa chọn cho đề tài của mình là động cơ bước.
4.4.2 Tính toán
4.4.3 Tính toán trục X
Kết cấu truyền động cho trục X mà nhóm lựa chọn cho đồ án là truyền động bằng dây đai.
Lực tác dụng lên trục X là;
F = m.a = 1,5.0,05 = 0,075 (N)
Trong đó:
F: lực tác dụng lên trục X (N)
m: khối lượng trục X (kg). Sau khi lắp ráp chuyển động trục x, đem cân khối lượng của trục được bao nhiêu chính là m. Kết quả cân được là 1,5kg.
a: gia tốc (m/s2). Dựa theo khảo sát của một mô hình máy in 3D, gia tốc trục X của máy là 0,05 (m/s2).
Momen xoắn:
M = F.lctđ = F. = 0,075.0,0006 = 0,000045 (Nm)
Trong đó:
M: momen xoắn (Nm)
F: lực tác dụng lên trục
lctđ: chiều dài cánh tay đòn (m). Chiều dài cánh tay đòn được tính bằng nửa đường kính của puli.
Dpuli: đường kính của puli đai (m). Đường kính của puli được tính như sau:
Dpuli . C là chu vi của puli, sử dụng puli 16 răng có chu vi là 4mm.
4.4.4 Tính toán trục Y
Cơ cấu truyền động cho trục Y mà nhóm lựa chọn cho đồ án là truyền động bằng dây đai.
Lực tác dụng lên trục Y là:
F = m.a = 2.0.05 = 0,1 (N)
Trong đó:
m: khối lượng của trục Y sau khi lắp ráp và đem cân. Khối lượng cân được là 2kg.
a: gia tốc có được sau khi khảo sát mô hình 3D.
Momen xoắn:
M = F.lctđ = F.= 0,1.0,0006 = 0,00006 (Nm)
4.4.5 Tính toán trục Z
Trục Z là trục ít di chuyển nhất trong quá trình làm việc, tuy nhiên nó có yếu tố quyết đến chất lượng sản phẩm rất lớn vì nó liên quan đến thông số chiều dày một lớp in, thông số này ảnh hưởng đến độ bóng cũng như dung sai kích thước về chiều cao của chi tiết.
Thông thường đối với trục Z ta có thể sử dụng truyền động vít me – đai ốc, truyền động đai. Truyền động đai có ưu điểm là kết cấu nhỏ gọn, hoạt động êm, dễ thiết kế nhưng trục Z chuyển động lên xuống sẽ dễ gây trượt đai. Truyền động vít me – đai ốc được sử dụng trên trục Z do truyền động có hiệu suất cao, ít gây ra hiện tượng trượt, vận hành êm.
Lực tác dụng lên trục Z là:
F = m.a = 2,5.0,003 = 0,009 (N)
Trong đó:
m: khối lượng tổng, trục X chuyển động trên trục Z nên m là tổng khối lượng trục X và Z. Sau khi cân kết quả được 2,5kg.
a: gia tốc có được sau khi khảo sát thực tế.
Momen xoắn:
M = F.lctđ = F.= 0,009.= 0,000036 (Nm)
Trong đó:
Dtrục: là đường kính của trục Z (m). Sử dụng trục chuyển động là trục vitme có đường kính là 8mm.
4.4.6 Tính toán công suất động cơ
Công suất làm việc:
Trong đó:
Là momen xoắn (Nm).
Là vận tốc quay của motor (V/s).
Do ma sát, hao mòn của các bộ truyền ta có hiệu suất chung của hệ dẫn động là:
Trong đó:
: Là hiệu suất của khớp nối.
: Là hiệu suất của ổ lăn.
Công suất làm việc trên trục động cơ:
4.4.7 Chọn số vòng quay của động cơ
Số vòng quay của trục công tác:
Trong đó:
Là đường kính puly đai.
Vận tốc vòng.
Xác định số vòng quay đồng bộ nên dùng cho động cơ:
Chọn sơ bộ số vòng quay đồng bộ của động cơ là nđb=360 (v/p). Khi đó tỉ số truyền sơ bộ của hệ thống Usb được xác định:
Ta có Usb nằm trong khoảng .
- Vì công suất cần nhỏ và yêu cầu độ chính xác cao nên ta có thể chọn động cơ bước NEMA 17
Thông số kỹ thuật của động cơ:
|
Kiểu động cơ |
Điện áp định mức |
Dòng định mức |
Độ phân giải |
|
NEMA 17 |
4-5,5VDC |
1-1,5A |
1,8 độ/ bước |
|
Hình 4-6: Động cơ bước NEMA 17 |
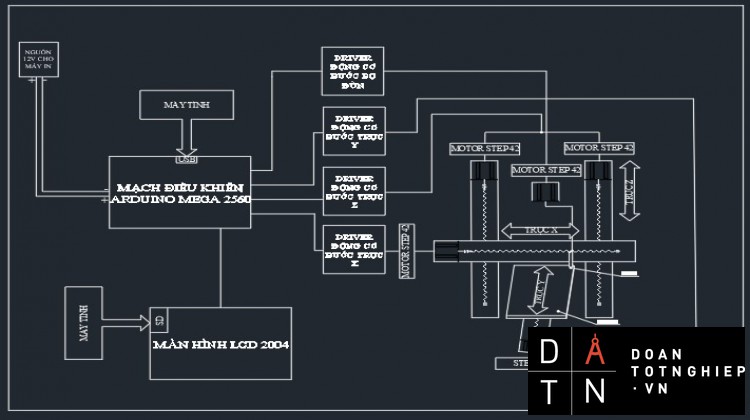
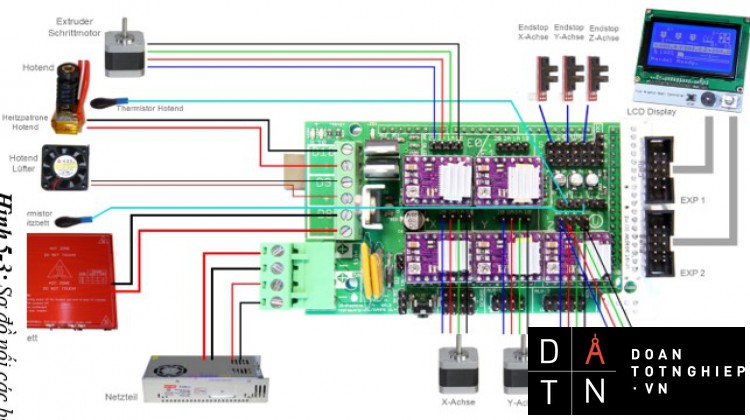
4.3 Lựa chọn hệ thống điều khiển
Ta có thể ứng dụng mạch arduino với mã nguồn mở để sử dụng làm mạch điều khiển.Hiện nay, các module được sử dụng khá phổ biến cho các loại máy in 3D gồm có:
+ Mạch Arduino Mega 2560.
+ Mạch RAMPS 1.4
+ Bộ điều khiển, hiển thị LCD 2004 hoặc bộ điều khiển, hiển thị LCD 128*64.
+ Modun điều khiển động cơ bước 4988.
4.3.1 Mạch arduino mega 2560
|
Hình 4-6: Mạch arduino mega 2560 |
|
Hình 4-7: Sơ đồ cắm chân bỏad arduino mega 2560 |
Arduino Mega 2560 là một bo mạch thiết kế với bộ xử lí trung tâm là vi điều khiển AVR ATMega2560. Cấu tạo chính của Arduino Mega 2560 bao gồm các phần sau:
Cổng USB: đây là loại cổng giao tiếp để ta upload code từ PC lên vi điều khiển. Đồng thời nó cũng là giao tiếp serial để chuyển giữ liệu giữa vi điều khiển và máy tính.
Jack nguồn: để chạy Arduino chỉ có thể lấy nguồn từ cổng USB ở trên, nhưng không phải lúc nào cũng có thể cắm từ máy tính được. lúc đó ta cần nguồn từ 9V đến 12V.
Có 54 chân digital (trong đó có 15 chân có thể sử dụng như những chân PWM là từ chân số 2 đến 13 và chân 44, 45, 46).
Có 6 ngắt ngoài: chân 2 (interrupt 0), chân 3 (interrupt 1), chân 18 (interrupt 5), chân 19 (interrupt 4), chân 20 (interrupt 3), và chân 21 (interrupt 2).
Có 16 chân vào analog (từ A0 đến A15).
Có 4 cổng serial giao tiếp với phần cứng:
|
Cổng Serial |
Chân RX |
Chân TX |
|
Cổng 0 |
0 |
1 |
|
Cổng 1 |
19 |
18 |
|
Cổng 2 |
17 |
16 |
|
Cổng 3 |
15 |
14 |
Vi điều khiển AVR: đây là bộ xử lí trung tâm của toàn bo mạch. Với mỗi mấu Arduino khác nhau thì con chip là khác nhau. Ở con Arduino Mega 2560 này thì sử dụng ATMega2560.
Các thông số của Arduino Mega 2560:
|
Vi xử lí: |
5V |
|
Điện áp hoạt động: |
7-12V |
|
Điện áp đầu vào: |
6-20V |
|
Chân vào/ra (I/O) số: |
54 chân (15 chân là đầu ra PWM) |
|
Chân vào tương tự: |
16 |
|
Dòng điện trong mỗi chân I/O: |
40mA |
|
Dòng điện chân nguồn 3.3V: |
50mA |
|
Bộ nhớ trong: |
256KB |
|
EEPROM: |
4KB |
|
Xung nhịp: |
16MHz |
Các Mega 2560 có 16 đầu vào tương tự, mỗi ngõ vào tương tự đều có độ phân giải 10 bit (tức là 1024 giá trị khác nhau). Theo mặc định đo từ 0 đến 5 Volts, mặc dù là nó có thể thay đổi phần trên của phạm vi bằng cách sử dụng chân Aref.
Các Mega 2560 có 256KB bộ nhớ flash để lưu trữ mã (trong đó có 8KB được sử dụng cho bộ nạp khởi động), 8KB SRAM và 4KB EEPROM.
Ứng dụng thực tế Arduino Mega 2560: với sự tiện ích vô cùng lớn của Arduino Mega 2560, mạnh mẽ với bộ nhớ flash lớn, số chân nhiều hơn và cùng số lượng shield hỗ trợ không hề nhỏ. Arduino Mega đã được đưa vào các dự án lớn hơn như xử lí thông tin nhiều luồng, điều khiển nhiều động cơ, xe điều khiển từ xa, LED cube hay còn mở rộng cánh cửa với thế giới IoT..v.v..
4.3.2 Mạch ramps 1.4
RAMPS 1.4 là board mở rộng cắm trên Arduino Mega 2560 và dùng để điều khiển các máy in 3D Reaprap cũng như các ứng dụng khác. RAMPS 1.4 có 5 khay dung để lắp module điều khiển động cơ bước A4988, các mạch công suất điều khiển các đầu đùn, bàn nhiệt,… của máy in 3D. do được thiết kế theo các module, các máy in 3D dung RAMPS 1.4 luôn dễ dàng bảo trì, thay thế, sửa chữa và nâng cấp với chi phí thấp.
|
Hình 4-8: Mạch RAMPS 1.4 |
Các tính năng nổi bật:
+ Dùng để điều khiển máy in 3D và các dạng robot 3 trục tịnh tiến.
+ Có thể mở rộng cho các phụ kiện điện tử khác.
+ Có 3 mạch công suất cho các đầu sấy và quạt, các mạch xử lí tín hiệu nhiệt điện trở.
+ Có thể tích hợp thẻ nhớ.
+ Điều khiển bàn nhiệt.
+ Hiển thị trạng thái hoạt động bằng led.
+ Hỗ trợ tới 2 động cơ trục Z.
+ 6 ngõ digital được dung cho cảm biến đầu cuối của mỗi trục.
+ Cầu trì tự phục hồi 5A bảo vệ các phần tử trong mạch.
+ Thêm các chân ngõ ra: PWM, ngõ ra số, nối tiếp, SPI, I2C và các ngõ ra analog.
4.3.3 Mạch driver điều khiển động cơ bước a4988
A4988 là driver điều khiển động cơ bước cực kỳ nhỏ gọn, hổ trợ nhiều chế độ làm việc, điều chỉnh được dòng ra cho động cơ, tự động ngắt điện khi quá nóng. A4988 hỗ trợ nhiều chế độ hoạt động của động cơ bước lưỡng cực như: Full, Half, 1/4, 1/8 và 1/16.
|
Thông số kĩ thuật:
+ Công suất ngõ ra lên tới 35V, dòng đỉnh 2A.
+ Có 5 chế độ: full bước, 1/2 bước, 1/4 bước, 1/8 bước, 1/16 bước.
+ Điều chỉnh dòng ra bằng chiết áp, nằm bên trên Current Limit=VREFx2.5
+ Tự động ngắt điện khi quá nhiệt.
4.3.4 Bộ điều khiển, hiển thị LCD
Màn hình LCD 2004 được thiết kế sử dụng với board RAMPS, có chức năng làm bảng hiển thị và điều khiển máy in 3D.
Mạch có tích hợp khi cắm thẻ nhớ SD, điều khiển rotary encoder với nút bấm, màn hình LCD 2004 cho phép cân chỉnh từ việc di chuyển các trục và nạp G-code trực tiếp từ khi cắm thẻ SD.
|
Hình 4-10: Màn hình LCD 2004 |
4.3.6 Đầu phun gia nhiệt
Đầu phun là nơi nung nóng sợi nhựa và đùn nhựa ra tạo mẫu in. Hầu hết các bộ phận ở đầu phun đều được chế tạo bằng hợp kim nhôm để đảm bảo tính tản nhiệt tốt. Đầu phun gồm có các bộ phận :
Khối tản nhiệt nhằm nhiệm vụ giảm nhiệt độ ở vùng phía trên đầu phun nhằm hạn chế nhựa bị chảy lỏng trước khi được phun ra làm tắc đầu phun nhựa, tràn nhựa làm ảnh hưởng đến chất lượng đầu phun nhựa.
Lõi dẫn nhựa nhằm nhiệm vụ định hướng đường đi của sợi nhựa vào đúng đầu phun. Lõi dẫn nhựa thường được chế tạo bằng nhôm bên trong có lót ống làm bằng nhựa teflon dùng để dẫn hướng và cách nhiệt cho sợi nhựa.
Cục nóng bao gồm điện trở gốm có tác dụng gia nhiệt, cảm biến nhiệt độ để điều khiển nhiệt độ nóng chảy của nhựa. Đây là bộ phận nóng nhất trên đầu phun do đó cần cần có biện pháp an toàn, tránh tiếp xúc trực tiếp với bộ phận này. Thường cục nóng được bọc với lớp băng keo cách nhiệt để tránh thoát nhiệt ra ngoài, tăng hiệu quả quá trình nung chảy nhựa.
Đầu phun là nơi định hình kích thước của nhựa lỏng khi được phun ra thường có các kích thước đầu phun từ 0,1 mm đến 0,5 mm. Tùy theo kích thước đầu phun thì có giới hạn về kích thước một lớp in khác nhau. Đầu phun đường kính nhỏ thì bề dày một lớp in càng nhỏ tuy nhiên sẽ dễ xảy ra hiện tượng tắc nhựa, tràn nhựa nếu chất lượng đầu phun không tốt
|
Hình 4-12: Đầu phun gia nhiệt |
Điện áp: 12VDC
- Động cơ bước: size 42
- Tốc độ trục xoay: 10 - 100mm
- Hỗ trợ in tốc độ cao 100mm
- Cảm biến: NTC thermistor 100K
- Đầu gia nhiệt: 12V - 40W
+ Nhiệt độ tối đa: 280 độ C
+ Nhiệt độ hoạt động bình thường 190 độ - 250 độ, không nên để quá 280 độ sẽ dễ dây hỏng cho các chi tiết máy khác.
4.3.5 Cảm biến nhiệt đồ đầu in và bàn nhiệt
Cảm biến nhiệt độ là thành phần không thể thiếu trên các máy in 3D. Các cảm biến này giúp bộ điều khiển theo dõi nhiệt độ đầu đùn cũng như nhiệt độ bàn nhiệt. Nếu một trong hai nhiệt độ trên không được đo chính xác thì quá trình in sẽ không được như ý muốn, chất lượng sản phẩm in sẽ giảm, thậm ý không in được.
Hiện nay các máy in 3D thường sử dụng giải pháp cảm biến nhiệt độ bằng các nhiệt điện trở. Giải pháp này có ưu điểm là giá thành rẻ, trong khi đó nhiệt điện trở có độ bền cao.
|
Hình 4-11: Dây cảm biến nhiệt độ |
THÔNG SỐ KỸ THUẬT:
- Điện trở tại 25°C: 100K
- Hệ số Beta: B25/ 50 = 3950K
- Sai số: ± 1%
- Khoảng nhiệt độ đo được: -50°C ~ +260°C
- Đường kính cảm biến: 1.05mm
- Chiều dài (sau khi nối dây): 1m
4.3.7 Nguồn tổ ong
Khối nguồn là bộ phận cung cấp năng lượng cho toàn bộ hệ thống điện trong máy. Đối với máy in 3D cần cần phải hoạt động ổn định nên nguồn cấp phải đảm bảo về điện áp và dòng điện luôn ổn định.
Các thiết bị điện trong máy có dải điện áp hoạt động từ 6V – 24V nên ta chọn bộ nguồn từ 12V – 5A để đảm bảo cung cấp đủ điện áp và dòng cho động cơ và các thiết bị khác. Xét về điện áp và cường độ dòng điện cung cấp nguồn tổ ong cung cấp điện áp 12V và cường độ dòng điện 30A để thuận lợi cho việc nâng cấp hệ thống điện sau này và đảm bảo hệ thống điện hoạt động tốt nhất ta lựa chọn nguồn tổ ong 12V - 30A.
|
Hình 4-13: Nguồn tổ ong |
4.3.8 Bàn nhiệt
Bàn nhiệt là thành phần quan trọng của máy in 3D, giúp tăng chất lượng sản phẩm và độ ổn định khi in 3D.
Các tính năng nổi bật:
- Hỗ trợ nguồn 12V và 24V DC
- Phủ đồng 2 mặt
- Sử dụng dễ dàng, theo tiêu chuẩn
- Cường độ tiêu thụ: 8.8 – 9.8 A (với nguồn 12V)
- Kích thước bao: 214×214 mm
- Kích thước bàn in hiệu dụng: 200×200 mm