LUẬN VĂN TỐT NGHIỆP Thiết kế chế tạo thiết bị hổ trợ khớp gối

NỘI DUNG ĐỒ ÁN
TÓM TẮT
Các thiết bị máy móc để thay thế sức lao động ngày càng được phát triển và hoàn thiện. Tuy nhiên, nhu cầu nâng cao khả năng chịu đựng, khả năng làm việc của cơ thể cũng rất phổ biến. Hỗ trợ cho cơ thể chủ yếu là ở các chi, trong đó khớp gối làm việc với cường độ cao nhất trong đa số các công việc.
Việc hỗ trợ cho khớp gối cần giải quyết các vấn đề sau:
Xác định vị trí của các khớp sinh học để lắp một cơ cấu song song với chi. Do cấu tạo của khớp sinh học khá phức tạp nên không thể xác định được vị trí một cách chính xác. Nếu khớp sinh học không trùng với khớp của cơ cấu sẽ sinh ra các lực (momen) cản, các thành phần lực này tác động lên chi gây đau và bước đi khó khăn khi mang cơ cấu. Do đó cần phải thêm vào các bậc tự do thụ động để loại bỏ các momen cản này. Việc tính toán, lắp thử nghiệm các bậc tự do thụ động sao cho hợp lý giúp cơ cấu làm việc linh hoạt, hiệu suất làm việc cao chiếm một phần quan trọng trong đề tài nghiên cứu này. Qua quá trình nghiên cứu, thử nghiệm nhiều cơ cấu khác nhau đã đưa ra cơ cấu với số bậc tự do thụ động thích hợp.
Lắp thiết bị lên cơ thể: Khi thiết bị làm việc, lực (momen) từ cơ cấu truyền lên cơ thể (chi). Khi đó tại vị trí lắp với cơ cấu sẽ chịu áp lực, các áp lực sẽ gây đau và tổn thương các bắp cơ. Để giải quyết vấn đề này cần phải có các thiết bị ghép nối (cơ cấu với chi) cho hợp lý.
Thiết bị ghép nối phải đáp ứng được các yêu cầu sau:
o Có diện tích tiếp xúc đủ rộng để giảm áp lực
o Có biên đạng phù hợp với chi tại vị trí ghép nối.
o Nhẹ
o Đủ độ bền
o Đủ dẻo để đeo vào cơ thể dễ dàng.
Tính toán, thiết kế các chi tiết của thiết bị.
Lắp các thiết bị cảm biến và điều khiển cơ cấu:
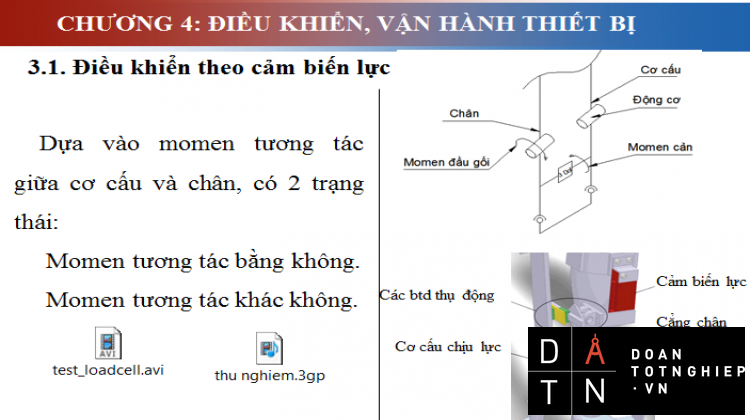
o Điều khiển bằng cảm biến lực: Cảm biến lực được lắp trên khâu thụ động ở vị trí phù hợp. Khi bước đi sẽ sinh ra các thành phần momen lên các khâu thụ động, thành phần momen chính sẽ tác động lên cảm biến lực, tín hiệu thu được sẽ điều khiển động cơ gấp/mở cơ cấu một góc hợp lý sao cho momen tương tác giữa cơ cấu với chân bằng không nếu là cơ cấu di chuyển theo, momen tương tác khác không nếu là cơ cấu hỗ trợ lực hoặc cản trở chuyển động.
o Điều khiển dựa vào các pha di chuyển của bước đi. Dựa trên cơ sở thuật toán 4 switch để nhận ra các pha di chuyển, pha nào là pha di chuyển theo và pha nào là pha cần hỗ trợ lực.
ABSTRACT
The labor-saving machinery is being developed and perfected. However, the demand to improve the body’s stamina and work capacity is still universal. The body is supported mainly by the limbs, in which the knee joints work with most intensity in the majority of tasks.
To accomplishing the task of supporting the knee joints, we have to solve the following problems:
Determining the location of the biological joints to assemble a structure paralleled to the legs. Due to their structural complexity, biological joints cannot be correctly positioned. The joints’ failing to coincide with the biological structure will generate power (torque) block, causing pain and difficulty in walking while wearing the device. Therefore we need to add in passive degrees of freedom to remove the torque. The appropriate calculation and experimental installation of passive degrees of freedom to help the structure work flexibly with high performance accounts for an important part in this research. The research and testing processes of many different structures have resulted in a structure with appropriate passive degrees of freedom.
When the device operates, power (torque) is transmitted from device to the body (legs). Then, the body part in contact with the device will be under pressure, the pressure will cause pain and damage muscles. To solve this problem, we need to have reasonable coupling devices (device to legs). Coupling devices must meet the following requirements:
o Contact area is large enough to reduce the pressure
o Profile in accordance with the coupling position.
o Light
o Durable enough
o Flexible enough to put on the body easily
Calculating and designing the components of the device.
Installing sensors and controlling device:
Controling by loadcell: the loadcell is set up on the passive stage in appropriate positions. On its operating, the device will produce torque to the passive stage; the main torque component will affect the loadcell, the received signal will control the engine to fold / open the device at such a reasonable angle that the device-feet interaction torque is zero if the device moves in, and other than zero if the device supports with force or hinders movement.
The control based on the movement phase of the step. Based on the 4 switch algorithm to recognize the movement phases, which phase is the phase that moves after and which one needs force support.
MỤC LỤC
TRANG
Trang tựa
Quyết định giao đề tài
Lý lịch cá nhân i
Lời cam đoan ii
Cảm tạ iii
Tóm tắt iv
Mục lục v
Danh sách các chữ viết tắt vii
Danh sách các hình viii
Danh sách các bảng x
Chương 1. TỔNG QUAN
1.1. Tổng quan về robot 1
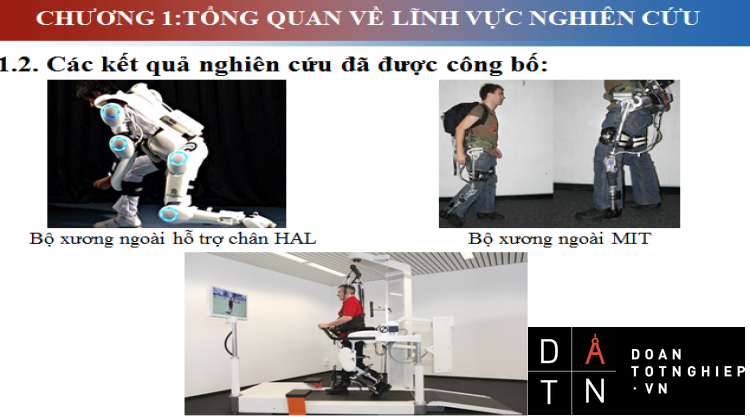
1.2. Các kết quả nghiên cứu đã được công bố 3
1.3. Mục đích của đề tài 7
1.4. Nhiệm vụ và giới hạn của đề tài 7
1.5. Phương pháp nghiên cứu 8
Chương 2. CƠ SỞ LÝ THUYẾT
2.1. Khâu, khớp, bậc tư do 9
2.2. Các dạng bài toán robot 10
2.3. Truyền động và điều khiển robot 17
2.4. Lý thuyết chuyển động của khớp gối 23
Chương 3. CÁC VẤN ĐỀ CẦN PHÁT TRIỂN VÀ KẾT QUẢ CHẾ TẠO
3.1. Vấn đề nghiên cứu 24
3.2. Thiết kế cảm biến momen 26
3.3. Thiết kế cơ cấu chịu lực cho khớp gối 29
3.4. Mô hình hóa cơ cấu 44
3.5. Tính toán công suất 47
3.6. Thiết kế chi tiết 48
Chương 4. VẬN HÀNH THỬ NGHIỆM CƠ CẤU
4.1. Điều khiển cơ cấu 59
4.2. Hệ thống điều khiển 60
4.3. Vận hành và thử nghiệm cơ cấu 60
Chương 5. KẾT LUẬN VÀ KIẾN NGHỊ
5.1. Kết luận 65
5.2. Kiến nghị 66
TÀI LIỆU THAM KHẢO
PHỤ LỤC
DANH SÁCH CÁC CHỮ VIẾT TẮT
- Btd: Bậc tự do
- Btdtt: Bậc tự do thụ động
- Ctm: Chi tiết máy
- Cbl: Cảm biến lực
DANH SÁCH CÁC HÌNH
HÌNH TRANG
Hình 1.1. Các tư thế đúng khi nhấc vật nặng 1
Hình 1.2. Một số công việc phải mang vác vật nặng 2
Hình 1.3.Các trường hợp gặp vấn để về khớp gối 3
Hình 1.4.Đầu gối trong tư thế gấp 4
Hình 1.5. Góc vận động của khớp gối 6
Hình 1.6. Góc của khớp gối khi lên xuống cầu thang 6
Hình 1.7. RobotXOS 2, phiên bản cải tiến của dòng XOS 7
Hình 1.8. Bộ xương ngoài hỗ trợ chân HAL 8
Hình 1.9. Khung xương chân HULC 9
Hình 1.10. Honda_Walking_Assist_Device 10
Hình 1.11. Bộ xương ngoài MIT 10
Hình 1.12. Thiết bị phục hồi chức năng cho khớp gối 11
Hình 2.1.Các thông số của khâu : θ, d, a và α 17
Hình 2.2. Nguyên lý hoạt động của encorder 20
Hình 2.3. Sơ đồ nguyên lý của loadcell 21
Hình 2.4. Nguyên lý làm việc của loadcell chịu uốn. 22
Hình 3.1. Cơ cấu 2 khớp lệch tâm 22
Hình 3.2. Độ biến dạng của lò xo 24
Hình 3.3. Cảm biến momen 25
Hình 3.5. Kết quả thử nghiệm cảm biến momen trên cơ cấu 26
Hình 3.6. Lấy khuôn chân bằng thạch cao 30
Hình 3.7. Đúc mẫu bằng bê tông 34
Hình 3.8. Phản ứng nối ngang của phân tử UPE 31
Hình 3.9. Chi tiết ghép nối được tạo hình bằng compsite 32
Hình 3.10. Nguyên lý của máy quét 3D 33
Hình 3.11. Số bậc tự do thụ động của cơ cấu có 1 khớp. 34
Hình 3.12. Số bậc tự do thụ động của cơ cấu có 2 khớp 35
Hình 3.13. Số bậc tự do thụ động của cơ cấu có 3 khớp. 36
Hình 3.14. Kết quả thử nghiệm lần 1. 37
Hình 3.15. Kết quả chế tạo thử nghiệm lần 2 38
Hình 3.16. Kết quả thử nghiệm lần 3 39
Hình 3.20. Các bậc tự do thụ động được bố trí trên hệ trục tọa độ Decac 40
Hình 3.21. Momen cản sinh ra trên các bậc tự do thụ động 41
Hình 3.22. Bố trí cảm biến momen 41
Hình 3.23. Chu kỳ của bước đi 42
Hình 3.24. Mô hình hóa các btd thụ động ở khớp cổ chân 45
Hình 3.25. Mô hình hóa các btd thụ động ở khớp gối 46
Hình 3.26. Mô hình hóa các btd thụ động ở khớp háng 46
Hình 3.27. Trọng tâm của cơ thể khi đứng lên 47
Hình 3.28. Trọng tâm của cơ thể khi bước đi 48
Hình 3.29. Khớp trượt 49
Hình 3.30. Khớp xoay 50
Hình 3.31. Giá lắp motor 51
Hình 3.32. Các thông số của thanh trượt – ray trượt bi 52
Hình 3.33. Hướng chịu tải của thanh trượt – ray trượt bi 53
Hình 3.34.Cấu tạo chi tiết của cơ cấu 55
Hình 3.35.Kết quả chế tạo thiết bị hỗ trợ khớp gối 58
Hình 4.1. Sơ đồ nguyên lý điều khiển (bộ điều khiển momen tương tác) 58
Hình 4.2. Sự tương quan giữa chu kỳ bước đi và trạng thái của khớp gối 59
Hình 4.3. Nguyên lý điều khiển theo các pha của bước đi 60
Hình 4.4. Vị trí các cảm biến trên bàn chân 61
Hình 4.5. Sơ đồ nguyên lý mạch điều khiển 62
Hình 4.6. Sơ đồ nguyên lý mạch cầu H 62
Hình 4.7. Sơ đồ nguyên lý mạch khuếch đại 63
Hình 4.8 Sơ đồ nguyên lý mạch nguồn 63
Hình 4.9. Sơ đồ nguyên lý các nút nhấn, điều khiển 63
Hình 4.10. Vận hành thiết bị hỗ trợ lực 64
DANH SÁCH CÁC BẢNG
BẢNG TRANG
Bảng 2.1: Phân biệt giữa hỗ trợ lực và nâng vật nặng 8
Bảng 3.1:Mối liên hệ giữa trạng thái khớp gối với các điểm tiếp xúc trên bàn chân 24
Bảng 3.2: Các ký hiệu, thông số của thanh trượt – ray trượt bi 24
Bảng 3.3: Thông số tải trọng của thanh trượt – ray trượt bi 24
Bảng 3.4: Thông số tải trọng của khớp cầu 24
Bảng 4.1. Thuật toán 4 Switch 61
PHẦN MỞ ĐẦU
- Lý do chọn đề tài:
Điều kiện lao động đòi hỏi mật độ và khối lượng công việc ngày càng lớn, trong một số điều kiện không thể sử dụng các máy móc hoặc robot để làm việc được, do đó vẫn sử dụng sức lao động là chính (Công nhân làm việc trong các xưởng lắp ráp cơ khí, binh lính phải trang bị vũ trang với khối lượng lớn, các nhà du lịch…)
Hậu quả của các tai nạn hay do dị tật bẩm sinh, những người lớn tuổi sức khỏe yếu. Các nguyên nhân này làm cho một số người có khớp gối bị yếu, khó khăn trong việc di chuyển.
Từ các nguyên do trên đã đặt ra một nhu cầu: Có một thiết bị hỗ trợ để làm tăng khả năng chịu đựng của cơ thể (tốc độ và khối lượng vật mang), giúp cải thiện và phục hồi khả năng làm việc của các chi bị yếu do tai nạn hoặc do bẩm sinh. Đối với những người bình thường có đầy đủ các chi để làm việc, nhưng đối với một số người có các chi bị khiếm khuyết thì để có một đôi chân bước đi cũng chỉ là mơ ước. Khi mang vác vật nặng, toàn bộ khối lượng cơ thể và vật mang đều tác động lên đôi chân. Trong các động tác bước đi, khớp gối chịu momen lớn nhất.
Để giải quyết các nhu cầu trên, đề tài này đã đưa ra hướng nghiên cứu thiết kế và chế tạo thiết bị trợ lực cho khớp gối.
- Mục đích, khách thể và đối tượng nghiên cứu:
2.1. Mục đích nghiên cứu
Chế tạo ra một thiết bị hỗ trợ khớp gối di chuyển.
Mở ra hướng nghiên cứu chế tạo thiết bị mang vật nặng.
2.2. Khách thể và đối tượng nghiên cứu
Cơ cấu cơ khí kết nối với cơ thể. Số bậc tự do thụ động.
Momen tương tác giữa cơ cấu với chân khi bước đi.
- Giả thuyết nghiên cứu:
Tính toán thử nghiệm để tìm ra số bậc tự do thụ động liên kết giữa cơ cấu với chân, tạo ra một cơ cấu chuyển động song song và linh hoạt khi bước đi.
Khi bước đi sẻ sinh ra momen tương tác giữa chân với cơ cấu, dựa vào đó để điều khiển cơ cấu hỗ trợ lực cho khớp gối.
- Nhiệm vụ nghiên cứu và phạm vi nghiên cứu:
Chế tạo thiết bị ghép nối: Cơ cấu sẽ hỗ trợ momen cho chi vận động, momen từ cơ cấu truyền sang chi, bắp chân tại vị trí lắp cơ cấu sẽ chịu áp lực dể gây ra đau cơ và chấn thương. Do dó cần phải chế tạo thiết bị ghép nối từ cơ cấu sang chi cho phù hợp.
Tìm ra số bậc tự do chính của các khớp trên cơ cấu. Dựa vào các bậc tự do của khớp sinh học để bố trí các bậc tự do tại các khớp trên cơ cấu cho phù hợp.
Tính toán số bậc tự do thụ động. Do các khớp trên cơ cấu không trùng với khớp sinh học nên khi di chuyển sẽ sinh ra các momen làm ngăn cản cuyển động, do đó cần thêm vào các bậc tự do thụ động để liên kết giữa cơ cấu với chi. Dựa trên các chuyển động chính của mỗi khớp để đưa ra các bậc tự do cho phù hợp.
Lắp thiết bị cảm biến giao tiếp giữa cơ cấu với chi. Tín hiệu được lựa chọn ban đầu là chuyển động, từ chuyển động của chi sẽ sinh ra momen giữa cơ cấu với chi. Momen này sẽ tác động lên các khâu thụ động. Thay thế khâu thụ động bằng thiết bị cảm biến sẽ thu được tín hiệu hợp lý.
Tính toán công suất của cơ cấu.
Điều khiển cơ cấu.
- Phương pháp nghiên cứu:
Ứng với các mục tiêu nghiên cứu đưa ra các phương pháp nghiên cứu phù hợp
- Tìm hiểu tài liệu
- Nghiên cứu, thiết kế
- Tìm hiểu, lựa chọn
- Chế tạo, thử nghiệm
- Tóm tắt các tính toán, thiết kế, khảo sát, thống kê, phân tích, so sánh… và đưa ra kết quả nghiên cứu, ý nghĩa khoa học và giá trị thực tiễn của đề tài
6.1. Phân tích, tính toán số bậc tự do thụ động
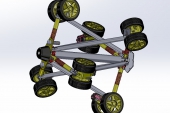
Xác định vị trí của các khớp sinh học để lắp một cơ cấu song song với chi. Do cấu tạo của khớp sinh học khá phức tạp nên không thể xác định được vị trí một cách chính xác. Nếu khớp sinh học không trùng với khớp của cơ cấu sẻ sinh ra các lực (momen) cản, các thành phần lực này tác động lên chi gây đau và bước đi khó khăn khi mang cơ cấu. Do đó cần phải thêm vào các bậc tự do thụ động để loại bỏ các momen cản này. Việc tính toán, lắp thử nghiệm các bậc tự do thụ động sao cho hợp lý giúp cơ cấu làm việc linh hoạt, hiệu suất làm việc cao chiếm một phần quan trọng trong đề tài nghiên cứu này. Qua quá trình nghiên cứu, thử nghiệm nhiều cơ cấu khác nhau đã đưa ra cơ cấu với số bậc tự do thụ động trong hình 1.
Tổng số bậc tự do chính và bậc tự do thụ động giữa hai khâu bằng 6.
Hình 1 Bố trí các bậc tự do trong cơ cấu
6.2. Chế tạo thiết bị ghép nối
Khi thiết bị làm việc, lực (momen) từ cơ cấu truyền lên cơ thể (chi). Khi đó tại vị trí lắp với cơ cấu sẻ chịu áp lực, các áp lực sẻ gây đau và tổn thương các bắp cơ. Để giải quyết vấn đề này cần phải có các thiết bị ghép nối (cơ cấu với chi) cho hợp lý. Thiết bị ghép nối phải đáp ứng được các yêu cầu sau:
o Có diện tích tiếp xúc đủ rộng để giảm áp lực
o Có biên đạng phù hợp với chi tại vị trí ghép nối.
o Nhẹ
o Đủ độ bền
o Đủ dẽo để đeo vào cơ thể dể dàng.
Qua quá trình nghiên cứu đã chọn được vật liệu composite, gia công chi tiết bằng phương pháp lấy mẫu theo biên dạng của chân và đúc tạo hình chi tiết.
Hình 2 Chi tiết ghép nối sử dụng vật liệu composite
6.3. Lắp các thiết bị cảm biến và điều khiển cơ cấu
6.3.1. Cảm biến lực
Cảm biến lực được lắp trên khâu thụ động ở vị trí phù hợp. Khi bước đi sẻ sinh ra các thành phần momen tương tác lên các khâu thụ động, thành phần momen chính sẻ tác động lên cảm biến lực. Có hai trạng thái điều khiển:
- Điều khiển sao cho momen tương tác bằng không lúc đó cơ cấu sẽ di chuyển theo.
- Điều khiển sao cho momen tương tác khác không lúc đó cơ cấu sẽ hỗ trợ lực hoặc cản trở chuyển động.
..............................................................
Hình 5 Biểu đồ momen hỗ trợ bước đi
Hình 6 Biểu đồ góc gấp mở của khớp gối
KẾT LUẬN VÀ KHUYẾN NGHỊ
- Kết luận
Khi đeo thiết bịtoàn bộ trọng lượng của cơ cấu tì xuống bàn chân (tì xuống đất khi chân chạm đất), cơ thể không phải chịu trong lượng của thiết bị.
Khi điều khiển momen tương tác bằng không thì cơ cấu di chuyển theo khớp (chân).
Khi điều khiển momen tương tác khác không:
- Momen tương tác trái dấu với momen động cơ → cản trở chuyển động. Thiết bị được sử dụng cho các bài tập thể lực cho khớp gối mà không ảnh hưởng tới các khớp khác.
- Momen tương tác cùng dấu với momen động cơ → hỗ trợ chuyển động. Thiết bị được sử dụng để hỗ trợ cho người có khớp gối bị yếu, hoặc người bình thường mang vào sẽ giảm mệt mỏi, tăng khả năng làm việc.
Do sử dụng bộ truyền trục vít – bánh vít nên khi cơ cấu di chuyển có hiện tượng bị giật (có khoảng rơ trong bộ truyền khi động cơ đảo chiều).
Ngoài momen tác dụng lên cảm biến lực còn có các thành phần momen khác tương tác giữa cơ cấu với chân. Sử dụng một cảm biến lực sẻ không đo được tất cả các thành phần momen tương tác dẫn đến điều khiển động cơ không chính xác.
Tín hiệu momen mà cảm biến lực nhận được tại các vị trí của bước đi (góc quay của khớp gối) không tuyến tính, do ngoài lực tương tác giữa cơ cấu với chân còn có trọng lượng của cơ cấu tì lên các bậc tự do thụ động.
Khi bước đi, góc quay của cổ chân có thể làm thay đổi momen tương tác (tín hiệu cảm biến lực nhận được sẽ thay đổi).
Kết cấu các bậc tự do thụ động chưa hợp lý. Còn tồn tại một bậc tự do tịnh tiến tại khớp gối trùng phương với lực (momen) tương tác giữa cơ cấu với chân. Do đó một phần momen tương tác giữa cơ cấu với chân bị triệt tiêu.
2. Khuyến nghị
Từ các khuyết điểm của cơ cấu trong quá trình thử nghiệm đưa ra một số kiến nghị sau:
- Sử dụng bộ truyền ma sát và truyền động cáp kết hợp để có tỉ số truyền lớn (1/100), thiết bị gọn nhẹ, không có khoảng rơ khi động cơ đảo chiều.
- Thay cảm biến lực bằng cảm biến momen để thu được tín hiệu momen tương tác chính xác hơn.
- Tối ưu hóa các bậc tự do thụ động về phương và vị trí lắp.
Sau khi khắc phục được các khuyết điểm trên có thể cải tiến cơ cấu hỗ trợ khớp gối thành thiết bị nâng vật nặng bằng cách lắp thêm các động cơ ở các khớp chịu lực khác (khớp cổ chân và khớp háng)
THIẾT BỊ HỖ TRỢ KHỚP GỐI
Knee joint support device
Cái Việt Anh Dũng, Nguyễn Văn Lê
Trường Đại học Sư Phạm Kỹ Thuật TP.HCM, Việt Nam
Tóm tắt
Các thiết bị hỗ trợ lực, phục hồi chức năng cho cơ thể người ngày càng được quan tâm và phát triển. Hiện nay, đã có nhiều kết quả nghiên cứu về bộ xương ngoài hỗ trợ lực, các thiết bị phục hồi chức năng... được công bố. Trong bài báo này, tác giả thực hiện nghiên cứu chế tạo thiết bị hỗ trợ cho khớp gối với mục tiêu không làm cản trở các chuyển động tự nhiên của cơ thể. Mặc khác, người mang thiết bị không phải chịu trọng lượng của thiết bị. Tác giả đã xây dựng các bậc tự do cho cơ cấu trên ba khớp sinh học (khớp cổ chân. Khớp gối, khớp hông), động cơ được lắp trên các khớp của cơ cấu tương ứng với vị trí của khớp gối với mục đích hỗ trợ lực cho khớp gối khi bước đi.
Abstract
The force supported devices, rehabilitation for human body are interested and develop more and more. Currently, there are many researchs in the world about exoskeleton, the rehabilitation device . In this study, the authors reseach on knee joint support device which does not block any movement of the legs. When device are installed motors at joints, it can be bring it’s weight and goods’s weight by itself. The authors installed the degrees of freedoms in three joints of legs (ankle, knee and hip joint), motors are installed in the joint of device near the knee joint to provide the force or touque for the knee joint.
- Đặt vấn đề
1.1. Giới thiệu:
Tổn thương khớp gối có thể gặp ở người già, người bị dị tật bẩm sinh hoặc những người bị tổn thương do tai nạn hoặc làm việc với cường độ cao. Khớp gối yếu khiến việc di chuyển và vận động gặp khiều khó khăn. Từ đó đặt ra một nhu cầu: Cần có một thiết bị hỗ trợ để làm tăng khả năng chịu đựng của cơ thể, giúp cải thiện và phục hồi khả năng làm việc của các chi bị yếu do tai nạn hoặc do bẩm sinh. Khi mang vác vật nặng, toàn bộ khối lượng cơ thể và vật mang đều tác động lên đôi chân. Trong các động tác bước đi, khớp gối chịu moment lớn nhất.
Hiện nay, đã có nhiều kết quả nghiên cứu được công bố trên thế giới: Bộ xương ngoài hỗ trợ lực (Bộ xương ngoài hỗ trợ chân HAL, Khung xương chân HULC,Bộ xương ngoài đẳng tĩnh cho khớp gối nhân tạo…), các thiết bị phục hồi chức năng ( Thiết bị hỗ trợ phục hồi chức năng Lokomat,…).
1.2. Các mục tiêu thiết kế
Thiết bị không làm ảnh hưởng đến các chuyển động tự nhiên của cơ thể người đeo
Trọng lượng của toàn bộ các cơ cấu trong thiết bị và khối lượng vật mang không ảnh hưởng đến người đeo.
Hỗ trợ lực cho khớp gối của người đeo thiết bị.
- Thiết kế, chế tạo thiết bị hỗ trợ lực
2.1. Phân tích, tính toán số bậc tự do thụ động
Để lắp một cơ cấu song song với chi, cần xác định vị trí của các khớp sinh học. Do cấu tạo của khớp sinh học khá phức tạp nên không thể xác định được vị trí một cách chính xác. Nếu khớp sinh học không trùng với khớp của cơ cấu sẽ sinh ra các lực (hay moment) cản, các thành phần lực này tác động lên chi gây ra cảm giác đau và bước đi khó khăn khi mang cơ cấu. Do đó cần phải thêm vào các bậc tự do thụ động để loại bỏ các momentt cản này. Việc tính toán, lắp thử nghiệm các bậc tự do thụ động sao cho hợp lý giúp cơ cấu làm việc linh hoạt, hiệu suất làm việc cao chiếm một phần quan trọng trong đề tài nghiên cứu này. Qua quá trình nghiên cứu, thử nghiệm nhiều cơ cấu khác nhau, nhóm tác giả đã đưa ra cơ cấu với số bậc tự do thụ động như trong hình 1.
Tổng số bậc tự do chính và bậc tự do thụ động giữa hai khâu bằng 6.
Hình 1. Bố trí các bậc tự do trong cơ cấu
2.2. Chế tạo thiết bị ghép nối
Khi thiết bị làm việc, lực (momentt) từ cơ cấu truyền lên cơ thể (chi). Khi đó tại vị trí lắp với cơ cấu sẽ chịu áp lực; áp lực này sẽ gây đau và tổn thương các bắp cơ. Để giải quyết vấn đề trên cần phải có các thiết bị ghép nối (cơ cấu nối với chi) cho hợp lý. Thiết bị ghép nối phải đáp ứng được các yêu cầu sau: (1) Có diện tích tiếp xúc đủ rộng để giảm áp lực; (2) Có biên đạng phù hợp với chi tại vị trí ghép nối; (3) Nhẹ; (4) Đủ độ bền; (5) Đủ dẻo để đeo vào cơ thể dễ dàng.
Qua quá trình nghiên cứu và thực nghiệm, nhóm tác giả chọn loại vật liệu composite và thực hiện gia công chi tiết theo phương pháp lấy mẫu biên dạng của chân và đúc tạo hình chi tiết.
Hình 2. Chi tiết ghép nối sử dụng vật liệu composite
2.3. Lắp các thiết bị cảm biến và điều khiển cơ cấu
2.3.1. Cảm biến lực
Cảm biến lực được lắp trên khâu thụ động ở vị trí phù hợp. Khi bước đi sẽ sinh ra các thành phần moment tương tác lên các khâu thụ động, thành phần moment chính sẽ tác động lên cảm biến lực. Có hai trạng thái điều khiển:
- Điều khiển sao cho moment tương tác bằng không; lúc đó cơ cấu sẽ di chuyển theo.
- Điều khiển sao cho moment tương tác khác không; lúc đó cơ cấu sẽ hỗ trợ lực hoặc cản trở chuyển động.
Hình 3. Vị trí lắp cảm biến lực.
2.3.2. Cảm biến góc (Encoder):
Dựa vào cảm biến góc để nhận biết các trạng thái của khớp gối, từ đó sẽ điều khiển moment cho phù hợp.
2.3.3. Cảm biến nhận biết các pha di chuyển của bước đi
Chu kỳ của bước đi
Hình 4. Chu kỳ của bước đi
- IC (Intial contact): Điểm tiếp xúc ban đầu
- FF (foot flat): Tiếp xúc toàn phần
- MS (midstance): Đứng thẳng
- HL (heel lift): Nâng người lên
- TO (toe of): Đẩy bằng mũi bàn chân.
Thuật toán 4swich
Mục đích của thuật toán 4swich là để phát hiện ra pha nào là pha hỗ trợ lực và pha nào là pha di chuyển theo. Dựa vào moment tương tác giữa cơ cấu với chân mà cảm biến lực nhận được để điều khiển moment cho động cơ hỗ trợ hợp lý.
Hình 5. Vị trí các cảm biến trên bàn chân
Bảng 4.1 Thuật toán 4 swich
|
SW1 |
SW2 |
SW3 |
SW4 |
Pha trụ |
|
1 |
1 |
0 |
1 |
Pha đánh gót |
|
1 |
1 |
0 |
0 |
Pha duỗi chân |
|
0 |
1 |
0 |
0 |
Pha đá chân |
|
0 |
1 |
1 |
0 |
Pha chuyển bước |
- Pha di chuyển: Chân phải hỗ trợ lực, chân trái di chuyển theo.
- Pha đánh gót: Chân phải hỗ trợ lực, chân trái di chuyển theo.
- Pha đá chân: Chân phải hỗ trợ lực, chân trái di chuyển theo.
- Pha chuyển bước: Chân phải di chuyển theo, chân trái hỗ trợ lực.
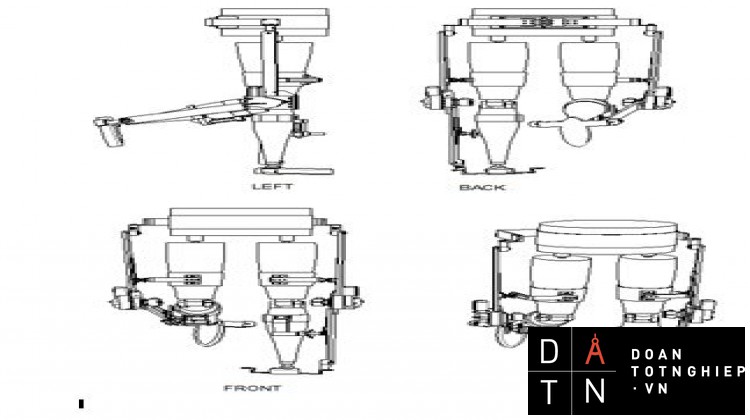
2.4. Kết quả nghiên cứu chế tạo:
Hình 6. Kết quả chế tạo thiết bị hỗ trợ khớp gối