ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử SỬ DỤNG BIẾN TẦN – PLC ĐIỀU CHỈNH TỐC ĐỘ BƠM


NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file,.lưu đồ giải thuật... thuyết minh, bản vẽ nguyên lý, bản vẽ thiết kế, FILE lập trình, ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử SỬ DỤNG BIẾN TẦN – PLC ĐIỀU CHỈNH TỐC ĐỘ BƠM
ĐỒ ÁN TỐT NGHIỆP
ĐỀ TÀI: SỬ DỤNG BIẾN TẦN – PLC ĐIỀU CHỈNH TỐC ĐỘ BƠM
MỞ ĐẦU
Trong sự nghiệp giáo dục của nước ta hiện nay mục tiêu là giáo dục và đào tạo ra những con người có đủ đức, đủ tài, có văn hóa, có kỹ năng ,kỹ xảo nghề nghiệp và có thái độ ứng xử tốt phục vụ tốt cho sự nghiệp công nghiệp hóa - hiện đại hóa - xây dựng nước nhà. Để đạt được mục đích đó thì thế hệ trẻ đặc biệt là sinh viên phải luôn chủ động tìm hiểu nghiên cứu và ứng dụng những thành tựu khoa học mới, cùng những nhu cầu, ứng dụng thực tế cấp thiết của nền công nghiệp nước nhà.
Là sinh viên năm cuối được làm đồ án tốt nghiệp là cơ hội cho em tìm hiểu thêm về kiến thức thực tế ,củng cố những kiến thức đã học, em đã được nghiên cứu về đề tài:
SỬ DỤNG BIẾN TẦN- PLC ĐIỀU CHỈNH TỐC ĐỘ BƠM
Đề tài đề cập đến một lĩnh vực đang ứng dụng rất phổ biến trong công nghiệp nhưng lại là kiến thức mới đối với sinh viên.
Vì kiến thức còn hạn chế nên trong đề tài khó tránh khỏi những sai sót, nhóm thực hiện đề tài rất mong nhận được ý kiến đóng góp và sữa chữa của quý thầy ( cô).
MỤC LỤC
Mở đầu: ........................................................................................ Trang
Chương 1: Tổng quan............................................................................................... 1
1.1 Tìm hiểu bệnh viện đa khoa LONG AN................................................... 1
1.2 Vận dụng vào đề tài.................................................................................... 2
1.2.1 Sơ đồ tổng quát của hệ thống................................................................ 2
1.2.2 Sử dụng cảm biến áp suất....................................................................... 2
1.2.3 Sử dụng biến tần trong đề tài.................................................................. 3
1.2.4 Cách thức điều khiển hệ thống............................................................. 5
1.3 Tính thực tế của đề tài................................................................................ 6
Chương 2: Các giải pháp điều khiển..................................................................... 8
2.1 Mạch điều khiển dùng Rơle...................................................................... 8
2.2 Mạch dùng kỹ thuật vi xử lý..................................................................... 8
2.3 Mạch dùng vi điều khiển ( Micro Controller)....................................... 9
2.4 Điều khiển bằng PLC ( Programable Logic Control)............................ 9
Chương 3: Giới thiệu chung về PLC.................................................................... 11
3.1 Giới thiệu về PLC...................................................................................... 11
3.2 Cấu trúc của PLC...................................................................................... 11
3.2.1 Bộ xử lý trung tâm................................................................................ 12
3.2.2 Bộ nhớ.................................................................................................... 12
3.2.3 Khối vào ra............................................................................................ 12
3.3 Phân loại PLC........................................................................................... 13
3.4 Thiết bị điều khiển PLC S7-200............................................................ 13
3.4.1 Tổng quan về họ PLC S7-200 của hãng Siemens............................. 13
3.4.2 Cấu trúc phần cứng của hệ thống PLC S7-200................................. 16
3.4.2.1 Đơn vị xử lý trung tâm (CPU Central Procesing Unit).................. 17
3.4.2.2 Bộ nhớ: Bao gồm cả RAM, ROM, EEPROM.................................. 18
3.4.2.3 Khối vào/ ra......................................................................................... 18
3.4.2.4 Thiết bị lập trình................................................................................. 18
3.4.2.5 Rơle..................................................................................................... 18
3.4.2.6 Modul quản lý việc phối ghép.......................................................... 19
3.4.2.7 Thanh ghi (Register).......................................................................... 19
3.4.2.8 Bộ đếm (Counter).............................................................................. 19
3.4.2.9 Bộ định thì (times):............................................................................ 19
3.4.3 Cấu trúc bộ nhớ của CPU của PLC S7-200....................................... 19
3.4.3.1 Vùng nhớ dữ liệu và đối tượng......................................................... 20
3.4.3.2 Mở rộng cổng vào ra.......................................................................... 22
3.4.4 Vòng quét của PLC............................................................................... 23
3.4.5 Ngôn ngữ lập trình trong S7-200........................................................ 24
3.4.6. Giao tiếp với thiết bị ngoại vi:............................................................ 24
3.4.7 Giao tiếp giữa sensor và cơ cấu chấp hành:..................................... 28
Chương 4: Tập lệnh S7-200................................................................................... 31
4.1. Lệnh logic với bit..................................................................................... 31
4.1.1 Contact.................................................................................................... 31
4.1.1.1 Công tắc............................................................................................... 31
4.1.1.2 Công tắc tức khắc............................................................................... 31
4.1.1.3 Lệnh đảo bit, lệnh sườn..................................................................... 32
4.1.2 Coil.......................................................................................................... 33
4.1.2.1 Lệnh ra................................................................................................. 33
4.1.2.2 Lệnh ra tức khắc................................................................................. 33
4.1.2.3 Lệnh Set, Reset................................................................................... 33
4.1.2.4 Lệnh Set, Reset Immediat.................................................................. 33
4.2. Lệnh so sánh............................................................................................. 34
4.3. Lệnh chuyển đổi...................................................................................... 35
4.4. Lệnh định thời.......................................................................................... 36
4.5. Lệnh bộ đếm............................................................................................. 39
4.6. Lệnh dịch chuyển ô nhớ......................................................................... 40
4.7. Lệnh toán số học...................................................................................... 41
4.7.1 Cộng, Trừ, Nhân, Chia số nguyên, số thực......................................... 41
4.7.2 Lệnh tăng giảm một đơn vị .................................................................. 43
4.8. Lệnh dịch và quay................................................................................... 44
4.8.1 Dịch trái hay phải.................................................................................. 44
4.8.2 Quay trái hay phải................................................................................. 44
4.9. Các lệnh điều khiển chương trình......................................................... 45
4.9.1 END có điều kiện................................................................................... 45
4.9.2 STOP........................................................................................................ 45
4.9.3 Lệnh Watchdog Reset........................................................................... 46
4.9.4 Lệnh nhảy............................................................................................... 46
4.10 Lệnh chương trình con........................................................................... 46
Chương 5: Các giao thức giao tiếp trong mạng S7-200.................................. 49
5.1 Chuẩn truyền RS 485............................................................................... 49
5.2 Giao thức PPI............................................................................................. 50
5.3 Giao thức MPI............................................................................................ 51
5.4 Freeport ..................................................................................................... 51
5.5 USS protocol.............................................................................................. 52
5.5.1 Ðiều kiện sử dụng giao thức USS....................................................... 52
5.5.2 Thời gian yêu cầu cho việc truyền thông với biến tần.................... 53
5.5.3 Sử dụng các lệnh USS:.......................................................................... 53
5.5.4 Các lệnh trong giao thức USS: ........................................................... 54
5.5.4.1 Lệnh USS- INIT: ................................................................................ 54
5.5.4.2 Lệnh USS - CTRL:.............................................................................. 55
5.5.4.3 Lệnh USS_RPM_x: Cấu trúc lệnh.................................................... 57
5.5.4.4 Lệnh USS _WPM _x:........................................................................ 59
5.6 Vòng điều khiển tín hiệu ổn định áp suất:............................................ 61
5.7 Kết nối giữa PLC và biến tần................................................................... 61
Chương 6: chương trình điều khiển..................................................................... 64
6.1 Thiết lập các tham số cho biến tần......................................................... 64
6.2 Chương trình điều khiển hệ thống.......................................................... 65
6.2.1 Thuật điều khiển.................................................................................... 65
6.2.2 Chương trình điều khiển...................................................................... 69
6.2.2.1 Chương trình điều khiển bao gồm.................................................... 69
6.2.2.2 Bảng Symbol....................................................................................... 70
6.2.2.3 Chương trình PLC............................................................................... 71
Chương 7: Thiết kế và thi công mô hình............................................................ 79
7.1 Sơ đồ kết nối PLC..................................................................................... 79
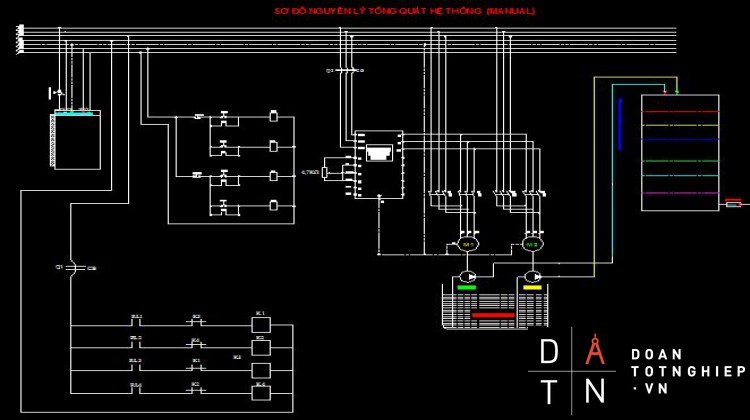
7.2 Sơ đồ nguyên lý tổng quát hệ thống (manual)...................................... 79
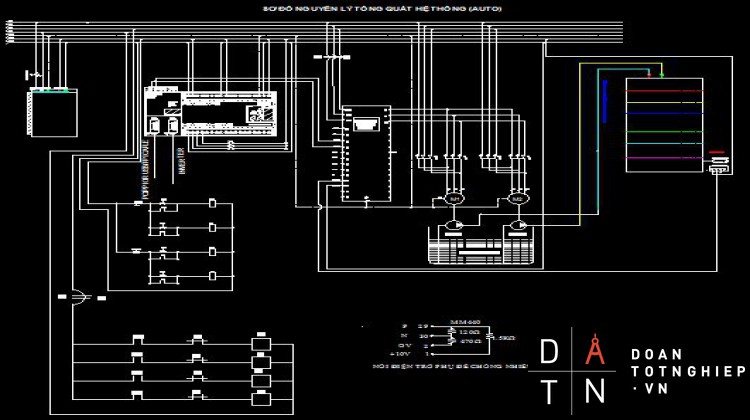
7.3. Sơ đồ nguyên lý tổng quát hệ thống ( auto)......................................... 79
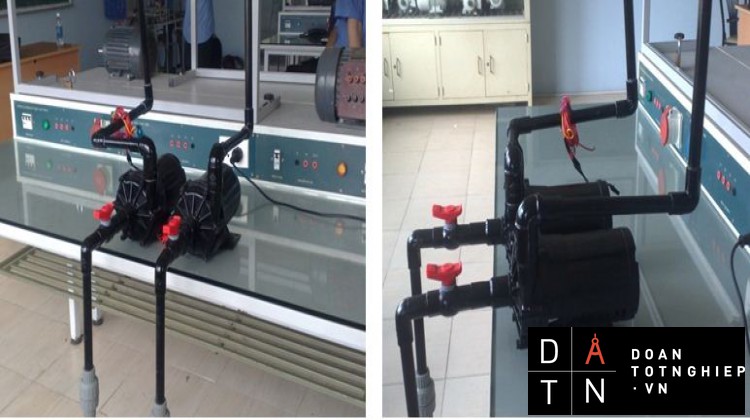
7.4 Một số hình ảnh trong đồ án.................................................................... 80
Kết luận và hướng phát triển...........................................................................84
......................
DANH MỤC CÁC BẢNG, SƠ ĐỒ, HÌNH
Bảng 3.1: Các loại CPU S7-200..................................................................................... 15
Bảng 3.2: So sánh các thông số và đặc điểm kỹ thuật của series 22x...................... 15
Bảng 3.3: Mã số và các thông số về điện áp nguồn và I/O........................................ 16
Bảng 3.4: Các thông số về công suất tiêu thụ và dòng điện I/O............................... 16
Bảng 3.5: Đặc điểm và giới hạn vùng ngớ của CPU S7 22x...................................... 20
Bảng 5.1: Các thông số chuẩn truyền RS 485.............................................................. 49
Bảng 5.2 Mô tả chức năng của các chân của port RS 485........................................ 50
Bảng 5.3: Thời gian yêu cầu cho truyền thông với MM............................................. 53
Bảng 5.4 Kiểu dữ liệu và toán hạng của các đầu vào/ra trong lệnh USS_INIT....... 55
Bảng 5.5: Kiểu dữ liệu và toán hạng của các đầu vào/ra trong lệnh USS _CTRL.. 57
Bảng 5.6: Kiểu dữ liệu và toán hạng của các đầu vào/ra trong lệnh USS_RPM_x 58
Bảng 5.7: Kiểu dữ liệu và toán hạng của các đầu vào/ra trong lệnh USS_WPM_x 60
Sơ đồ 3.1 Sơ đồ mạch điện giao tiếp giữa CPU 221 loại AC/DC/RLY
và cơ cấu chấp hành....................................................................................... 29
Sơ đổ 3.2: Sơ đồ mạch giao tiếp giữa CPU 224 AC/DC/RLY với sensor
và cơ cấu chấp hành....................................................................................... 30
Sơ đồ 3.3: Sơ đồ mạch giao tiếp giữa CPU 224 DC/DC/DC với sensor
và cơ cấu chấp hành....................................................................................... 30
Hình 1.1: Sơ đồ sử dụng biến tần điều khiển cho một bơm......................................... 2
Hình 1.2: Biến tần MM440 của Siemen.......................................................................... 3
Hình 1.3: Sơ đồ nguyên lý của biến tần.......................................................................... 4
Hình 1.4: Pulse Width Modulation – PWM................................................................... 5
Hình 1.5: Sử dụng biến tần cho nhiều bơm.................................................................... 6
Hình 1.6: Sơ đồ tổng quát hệ thống................................................................................. 6
Hình 3.1 Sơ đồ cấu trúc của PLC................................................................................... 11
Hình 3.2: Sơ đồ cấu trúc tổng quan của PLC............................................................... 13
Hình 3.3: Tổng quan về họ PLC s7_200 của hãng Siemens:..................................... 13
Hình 3.4 Cấu tạo CPU224............................................................................................... 17
Hình 3.5 Ghép nối CPU 214 hoặc 215 với module mở rộng..................................... 22
Hình 3.6 Quá trình hoạt động của một vòng quét....................................................... 23
Hình 3.7 : Cách cài đặt và giao tiếp giữa PC – PLC................................................... 25
Hình 3.8 Giao tiếp giữa PC/PG với PLC thông qua PC/PPI cable............................ 26
Hình 3.9 Thiết lập kết nối giữa PC/PG tới PLC............................................................ 27
Hình 5.1 Cấu trúc của port RS 485................................................................................ 49
Hình 5.2 : Mô tả byte SMB 30....................................................................................... 51
Hình 5.3 Kết nối PLC và biến tần theo giao thức USS............................................... 52
Hình 5.4 : Sơ đồ chân của cổng truyền thông trên PLC............................................. 62
Hình 7.4.1 Cpu 224xp..................................................................................................... 80
Hình 7.4.2: động cơ không đồng bộ 3 pha................................................................... 80
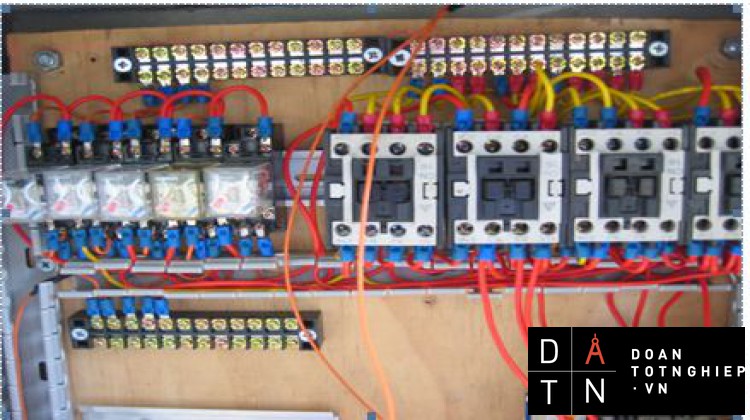
Hình 7.4.3: Mạch điều khiển.......................................................................................... 81
Hình 7.4.4: Cảm biến áp suất......................................................................................... 81
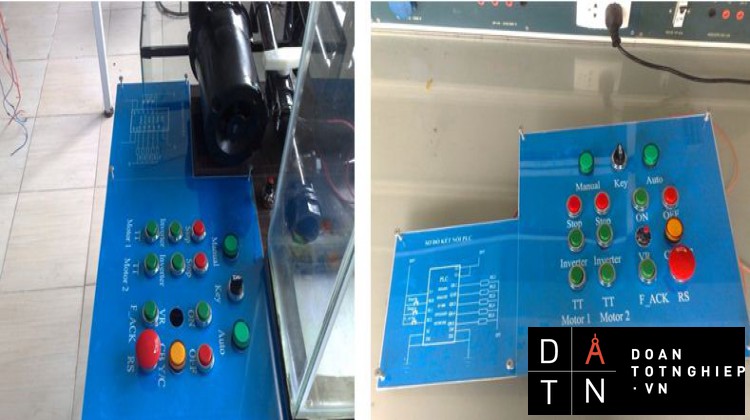
Hình 7.4.5: bảng điều khiển........................................................................................... 82
Hình 7.4.6:Biến tần MM440.......................................................................................... 82
Hình 7.4.7: Mô hình tổng quát....................................................................................... 83
KÍ HIỆU CÁC CỤM TỪ VIẾT TẮT
PLC : Programmable logic controller
ADC :Analog Digital Converter
PID : Proportional Integral Derivative
VSD : Variable Speed Drive
USS : Universial Series Interface
IGBT : Insulated Gate Bipolar Transistor
TÀI LIỆU THAM KHẢO
[1]Dương Minh Trí , Cảm biến và ứng dụng , Nhà xuất bản khoa học và kỹ thuật.
[2]Tài liệu của Tập đoàn SIEMENS ELECTRIC.
[3]Phan Xuân Minh – Nguyễn Doãn Phước, Tự động hoá với si matic s7 – 200, Nhà xuất bản Nông Nghiệp
[4] http://www.siemens.com
CHƯƠNG 1
TỔNG QUAN
- Tìm hiểu bệnh viện đa khoa LONG AN
Bệnh viện nằm ở TP.Tân An với 7 lầu, gồm hơn 150 phòng. Là 1 trong số những bệnh viện lớn và hiện đại ở khu vực phía Nam.Trong bệnh viện bao gồm nhiều thiết bị như hệ thống giặt, làm lạnh, làm ấm (hệ thống điều hòa, quạt gió), chiếu sáng, hệ thống cung cấp nước sạch ... Những thiết bị đó trong bệnh viện phần lớn dùng biến tần để điều khiển. Các biến tần này đều là loại chuyên dụng, phù hợp với từng thiết bị. Trong đề tài này ta chỉ nghiên cứu về hệ thống cung cấp nước, hệ thống bơm cung cấp cho bệnh viện.
Số lượng bơm : 6. Hệ thống bơm cung cấp 700m3 /ngày. Công suất của động cơ 15KW-380V( động cơ KĐB 3 pha). Duy trì áp suất 7-8 bar. Gồm contactor, role,VSD,bộ điều khiển.
Hệ thống bơm này dùng biến tần của hãng Danfoss (Đan Mạch) để điều chỉnh tốc độ động cơ. Sở dĩ, bệnh viện dùng biến tần của Danfoss mà không dùng biến tần của Siemens – một loại biến tần thông dụng ở Việt Nam là vì: Biến tần của Danfoss là một loại biến tần chuyên dụng cho bơm và quạt, như thế khi sử dụng biến tần này ta không phải xác định đặc tính tải nữa. Giá thành của Danfoss ban đầu mua vào tuy đắt hơn 1,2 đến 1,3 lần so với Siemens, tuy nhiên nó vẫn đảm bảo được tính kinh tế vì khả năng tiết kiệm điện năng của nó mang lại.
Bộ điều khiển là phần mềm chuyên dụng của hãng. Nó rất dễ sử dụng và thông qua bảng điều khiển. Tại đây, bộ điều khiển sẽ xử lý các tín hiệu đưa về và đưa ra quyết định điều khiển hợp lý.
Bộ điều khiển này chỉ điều khiển 4 bơm trong hệ thống 6 bơm, hai bơm còn lại đều nối trực tiếp vào biến tần chạy trực tiếp mà không qua bộ điều khiển, sở dĩ có điều này bởi vì hai bơm này có tác dụng dự phòng trong trường hợp 4 bơm còn lại không chạy hoặc bộ điều khiển bị hỏng.
Cảm biến áp suất được đặt ở ngay đầu ra của bơm. Áp suất luôn được duy trì trong khoảng 7-8 Bar. Hệ thống dùng hai cảm biến áp suất: một đưa về bộ điều khiển, một đưa về để làm tín hiệu cho biến tần dự phòng.
Nguyên tắc hoạt động ở đây:
Nước được bơm trực tiếp từ bể chứa, qua bể lọc (thông qua bơm trung gian) sau đó được hệ thống bơm đưa đi đến các đường ống. Hệ thống bơm có một bơm được nối vào bộ biến tần. Bơm nào được nối là do bộ điều khiển quyết định. Giả sử bơm số một luôn được nối, biến tần điều chỉnh tốc độ của bơm này để duy trì được áp suất mong muốn. Khi bơm số một được điều chỉnh dến tốc dộ tối đa mà chưa đáp ứng được áp suất đầu ra thì biến tần điều chỉnh cho tốc độ bơm này giảm xuống. Bơm số hai được đóng vào, dưới tác dụng của biến tần bơm số 2 được tăng dần tốc độ và điều chỉnh đến khi nào đáp ứng được yêu cầu. Hoạt động của bơm số 3 và bơm số 4 tương tự như vậy. Không có trường hợp cả 6 bơm cùng hoạt động. Hai bơm được ngắt ra làm bơm dự phòng, bộ biến tần điều chỉnh tốc độ, hai bơm chạy trực tiếp.
Trong quá trình cung cấp nước trong ngày, có thể có một số bơm không sử dụng đến. Để chống bó cho động cơ, bộ điều khiển cho động cơ chạy 10phút. Ta cũng không thể để một bơm được nối vào biến tần chạy trực tiếp quá nhiều nên sau khoảng 10 ngày thay luân phiên bơm trực tiếp.
Hình 1.1: Sơ đồ sử dụng biến tần điều khiển cho một bơm
1.2 Vận dụng vào đề tài
1.2.1 Sơ đồ tổng quát của hệ thống
Từ yêu cầu của đề tài là: Sử dụng biến tần - PLC để điều khiển, điều chỉnh tốc độ hai động cơ bơm để ổn định mực nước (áp suất ) trên bồn của hệ thống bơm nước, sau khi tìm hiểu hệ thống bơm nước tại bệnh viện LONG AN chúng em xây dựng sơ đồ tổng quát của hệ thống như hình 1.3.
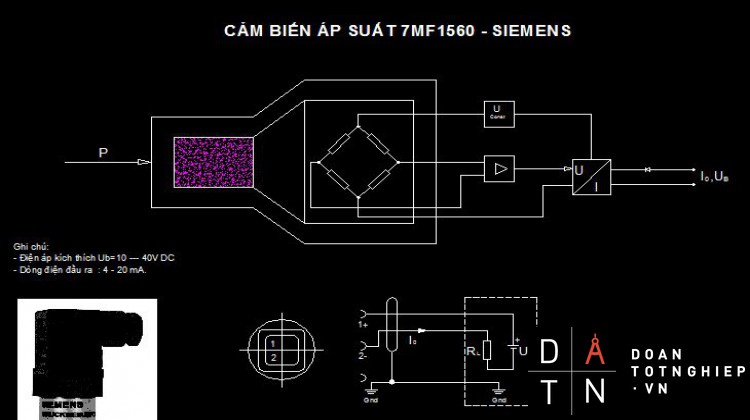
1.2.2 Sử dụng cảm biến áp suất
Sử dụng cảm biến trong đề tài. Trong đề tài ta sử dụng loại cảm biến như sau:
Drucktransmitter P121-400-G17
Meβbereich : 0 ... 100mbar rel
Ausgang : 4 ... 20mA.
Hilfsspannung : 11...32V DC
Nr.:11218467
Thies Ident – Nr .: 232787101
Cảm biến áp suất được đặt trên bồn nước thông qua cơ cấu lắp đặt để hạn chế sự ảnh hưởng của áp suất động.Cảm biến này sẽ đo áp suất của bồn nước, áp suất này luôn được duy trì trong một khoảng nào đó dùng để duy trì mực nước ở 1 mức nào đó.
1.2.3 Sử dụng biến tần trong đề tài
Ngày nay, việc tự động hóa trong công nghiệp và việc ổn định tốc độ động cơ đã không còn xa lạ gì với những người đang công tác trong lĩnh vực kỹ thuật. Biến tần là một trong những thiết bị hộ trợ đắc lực nhất trong việc ổn định tốc độ và thay đổi tốc độ động cơ một cách dễ dàng nhất mà hầu hết các xí nghiệp đang sử dụng. Trong phạm vi đề tài chỉ giới thiệu về họ biến tần được sử dụng là MicroMaster 440. MM440 chính là họ biến tần mạnh mẽ nhất trong trong dòng các biến tần tiêu chuẩn. Khả năng điều khiển Vector cho tốc độ và Môment hay khả năng điều khiển vòng kín bằng bộ PID có sẵn đem lại độ chính xác tuyệt vời cho các hệ thống truyền động quan trọng như các hệ thống nâng chuyển, các hệ thống định vị. Không chỉ có vậy, một loạt khối logic sẵn có lập trình tự do cung cấp cho người sử dụng sự linh hoạt tối đa trong việc điều khiển hàng loạt các thao tác một cách tự động. MicroMaster 440 là bộ biến đổi tần số dùng điều khiển tốc độ động cơ 3 pha xoay chiều. Có nhiều loại khác nhau từ 120W nguồn vào 1 pha đến 200kW nguồn vào 3 pha. Các biến tần dùng vi xử lý để điều khiển và dùng công nghệ transistor lưỡng cực cửa cách ly. Điều này làm cho chúng đáng tin cậy và linh hoạt. Một phương pháp điều chế độ rộng xung đặc biệt với tần số xung được chọn cho phép động cơ làm việc êm. Biến tần có nhiều chức năng bảo vệ và bảo vệ động cơ.
Hình 1.2: Biến tần MM440 của Siemen
Biến tần MICROMASTER 440 với các thông số đặt mặc định của nhà sản xuất, có thể phù hợp với một số ứng dụng điều khiển động cơ đơn giản. Biến tần MICROMASTER 440 cũng được dùng cho nhiều các ứng dụng điều khiển động cơ cấp cao nhờ danh sách các thông số hỗn hợp của nó.
Biến tần MICROMASTER 440 có thể dùng trong hai ứng dụng "Kết hợp và riêng lẻ" khi tích hợp trong "Hệ thống tự động hoá".
Cấu tạo chung và nguyên tắc hoạt động
MM 440 thay đổi điện áp hay tốc độ cho động cơ xoay chiều bằng cách chuyển đổi dòng điện xoay chiều cung cấp (AC Supply) thành dòng điện một chiều trung gian (DC Link) sử dụng cầu chỉnh lưu. Sau đó điện áp một chiều DC Link lại được nghịch lưu thành điện áp xoay chiều cung cấp cho động cơ với giá trị tần số thay đổi. Nguồn cung cấp cho biến tần có thể sử dụng nguồn xoay chiều một pha (cho công suất thấp), hay sử dụng nguồn xoay chiều ba pha. Phần điện áp một chiều trung gian chính là điện áp trên các tụ điện, các tụ điện đóng vai trò san phẳng điện áp một chiều sau chỉnh lưu và cung cấp cho phần nghịch lưu. Điện áp trên tụ không điều khiển được và phụ thuộc vào điện áp đỉnh của nguồn xoay chiều cung cấp.
Hình 1.3: Sơ đồ nguyên lý của biến tần
Điện áp một chiều được chuyển thành điện áp xoay chiều sử dụng phương pháp điều chế độ rộng xung (Pulse Width Modulation – PWM). Dạng sóng mong muốn được tạo lên bởi sự đóng cắt ở đầu ra của các transistors. MM440 sử dụng các IGBTs (Insulated Gate Bipolar Transistor) ở mạch nghịch lưu, điện áp xoay chiều mong muốn đựơc tạo ra bằng cách thay đổi tần số đóng cắt của các IGBTs. Điện áp xoay chiều ở đầu ra là sự tổng hợp của hàng loạt các xung vuông với các giá trị khác nhau ở đầu ra của các IGBTs, được thể hiện ở hình 3.3.
Hình 1.4: Pulse Width Modulation – PWM
1.2.4 Cách thức điều khiển hệ thống
Đầu tiên cho động cơ bơm 1 khởi động bằng cách đóng điện cho V1. Động cơ bơm sẽ khởi động và bơm nước vào bồn nước. Biến tần sẽ lấy tín hiệu phản hồi về từ cảm biến áp suất để điều chỉnh tốc độ động cơ, duy trì mực nước ( áp suất) trên bồn. Khi biến tần không thể duy trì được mực nước (áp suất) trong một khoảng thời gian đã định thì khối điều khiển (PLC) sẽ ngắt điện V1 và đóng điện cho L1 đồng thời đóng điện cho .Động cơ bơm 2 được cấp điện và được điều chỉnh qua biến tần để bù thêm lượng P cho bồn nước. Nếu mực nước(áp suất) trên bồn vượt quá giá trị đặt biến tần sẽ điều chỉnh tốc độ động cơ bơm 2 để giảm áp suất. Khi mực nước (áp suất) đã đạt yêu cầu thì PLC sẽ ngắt điện L1và V2 đồng thời đóng điện cho V1 để duy trì mực nước
Ở sơ đồ này vai trò của động cơ bơm 1 và 2 là tương đương, chúng có thể thay phiên nhau hoạt động thường trực tránh trường hợp một động cơ hoạt động liên tục trong thời gian dài.Tức là sau 1 khoảng thời gian định trước ta tiến hành đổi bơm. Ban đầu khi khởi động chương trình chạy với động cơ 1 và thực hiện các trường hợp xảy ra sau 1 khoảng thời gian chương trình chạy với động cơ 2 và có vai trò giống như chương trình động cơ 1.Trong quá trình cung cấp nước trong ngày, có thể một động cơ bơm sẽ không được sử dụng đến sẽ có thể gây ra hiện tượng bó động cơ. Để chống bó cho động cơ, ta có thể đóng điện cho động cơ chạy trong một thời gian ngắn trong ngày.
Hình 1.5: Sử dụng biến tần cho nhiều bơm
Hình 1.6: Sơ đồ tổng quát hệ thống
1.3 Tính thực tế của đề tài
Việc mong muốn có một sản phẩm tốt đáp ứng được nhu cầu công nghệ, tiết kiệm năng lượng, hiệu năng cao, độ tin cậy lớn, nhỏ gọn, ...và giá thành hợp lý luôn là cái đích hướng tới của khoa học công nghệ.
Khoa học công nghệ ngày càng phát triển vượt bậc nhất là việc ứng dụng của công nghệ điện tử vi mạch - điện tử công suất có thể tạo ra được những sản phẩm có chức năng xử lý trọn vẹn một quá trình, một khâu, thậm chí cả hệ thống… việc tiếp cận những công nghệ mới cũng như công nghệ của nước ta còn nhiều hạn chế. PLC – BIẾN TẦN hiện nay vẫn đang là những công nghệ hiện đại hàng đầu với tính năng nổi trội là điều khiển chính xác, dải điều chỉnh rộng (tần số 0 – 650 Hz), tiết kiệm được năng lượng đến 40%, độ tin cậy cao… Vậy nên với sinh viên học ngành điện công nghiệp sắp ra trường việc được tiếp cận một công nghệ mới là một may mắn cho em.
Qua quá trình tìm hiểu tại bệnh viện đa khoa LONG AN em thấy rằng trong các hệ thống bơm nước ở những bệnh viện, nhà cao tầng, khách sạn hay việc cung cấp nước sạch cho cả thành phố…việc duy trì áp suất không đổi trong đường ống là một vấn đề đặt ra. Để giải quyết vấn đề này, ta không thể dùng phương pháp bơm thông thường như: đóng máy trực tiếp bằng tay, hay hẹn giờ. Bởi vì thực tế việc sử dụng nước ở những giờ khác nhau trong ngày, áp suất ở các vị trí trên đường ống cung cấp là khác nhau. Biến tần với khả năng như: Kết nối với máy tính, giao tiếp với PLC, kết nối mạng...do đó nó hoàn toàn có khả năng giải quyết vấn đề trên. Trong biến tần tích hợp sẵn bộ điều khiển PID cùng với các đầu vào, đầu ra tương tự và số do đó có khă năng kết hợp với các phần tử khác tạo nên một hệ thống điều khiển tự động hoàn toàn. Biến tần có thể điều chỉnh để thay đổi tốc độ động cơ 3 pha rất rộng và trơn do đó nó được ứng dụng rộng rãi trong công nghiệp cũng như trong các hệ thống điều khiển tự động.
CHƯƠNG 2
CÁC GIẢI PHÁP ĐIỀU KHIỂN
2.1 Mạch điều khiển dùng Rơle
Trong giai đoạn đầu của thời kỳ phát triển công nghiệp vào khoảng 1960 và 1970, yêu cầu tự động hóa của hệ thống điều khiển được thực hiện bằng các Rơle điện từ nối với nhau bằng dây dẫn điện trong bảng điều khiển, trong trường hợp bảng điều khiển có kích thước quá lớn đến nỗi không thể gắn tàn bô lên trên tường và các dây nối cũng không hoàn toàn tốt vì thế thường xảy ra trục trặc trong hệ thống. Một điểm quan trọng nữa là do thời gian làm việc của các Rơle có giới hạn nên khi thay thế cần phải ngưng toàn bộ hệ thống và dây nối cũng phải thay thế cho phù hợp, bảng điều khiển chỉ dùng cho một yêu cầu riêng biệt không thể thay đổi tức thời chức năng khác mà phải lắp ráp lại toàn bộ và trong trường hợp bảo trì cũng như sữa chữa cần đòi hỏi thợ cuyên nghiệp. Nói chung hê điều khiền dùng Rơle có những nhược điểm sau:
- Tốn kém rất nhiều dây dẫn.
- Thay thế phức tạp
- Cần công nhân sữa chữa tay nghề cao
- Công suất tiêu thụ lớn
- Thời gian sữa chữa lâu
- Khó cập nhật sơ đồ nên khó khăn cho công tác bảo trì cũng như thay thế.
Với sự phát triển mạnh mẽ của ngành kỹ thuật số đặc biệt là cho ra đời các họ vi xử lý, vi điều khiển hay PLC đã giải quyết được những bế tắc và kinh tế hơn mà phương pháp dùng tiếp điểm không thực hiện được.
2.2 Mạch dùng kỹ thuật vi xử lý
Mạch dùng kỹ thuật vi xử lý có những ưu điểm sau:
- Mạch có thể thay đổi một cách linh hoạt bằng việc thay đổi phần mềm trong khi đó phần cứng không thay đổi mà mạch dùng Rơle không thể thực hiện được mà nếu có thể thực hiện được thì cũng cứng nhắc mà người công nhân cũng khó tiếp cận, dễ nhầm.
- Số linh kiện để sử dụng trong mạch cũng ít hơn.
- Mạch đơn giản hơn so với mạch đếm sản phẩm dùng Rơle và có phần cài đặt số đếm ban đầu.
- Mạch có thể lưu lại số liệu của các ca sản suất.
- Mạch có thể điều khiển được nhiều dây chuyền sản suất cùng lúc bằng phần mềm.
- Mạch cũng có thể kết nối giao tiếp được với máy tính thích hợp cho những người quản lý tại phòng kỹ thuật nắm bắt được tình hình sản suất qua màn hình của máy tính.
Nhưng trong thiết kế người ta chọn phương pháp tối ưu và kinh tế. Với sự phát triển của khoa học kỹ thuật ngày nay người ta không còn sử dụng phương pháp viết trên vi xử lý nữa mà nâng cao ngôn ngữ này bằng vi điều khiển.
2.3 Mạch dùng vi điều khiển ( Micro Controller)
Ngoài những ưu điểm của 2 phương pháp trên, phương pháp này còn có những ưu điểm sau:
- Trong mạch có thể sử dụng ngay bộ nhớ trong đối với chương trình có qui mô nhỏ, rất tiện lợi mà vi xử lý không thực hiện được.
- Nó có thể giao tiếp trực tiếp với máy tính mà vi xử lý cũng giao tiếp được nhưng là giao tiếp song song nên cần có linh kiện chuyển đổi dữ liệu từ song song sang nối tiếp để giao tiếp với máy tính.
2.4 Điều khiển bằng PLC ( Programable Logic Control)
Với phương pháp điều khiển bằng PLC có những ưu điểm sau:
- Giảm 80% số lượng dây nối.
- Công suất tiêu thụ của PLC là rất thấp.
- Có chức năng tự chẩn đoán do đó giúp cho công tác sữa chữa được nhanh chóng và dễ dàng.
- Chức năng điều khiển nhanh chóng dễ dàng bằng thiết bị lập trình ( máy tính, màn hình) mà không cần thay đổi phần cứng nếu không có yêu cầu thêm bớt các yêu cầu xuất nhập.
- Số lượng Rơle và Timer ít hơn nhiều so với hệ điều khiển cổ điển.
- Số lượng tiếp điểm trong chương trình sử dụng không hạn chế.
- Thời gian hoàn thành một chu trình điều khiển rất nhanh (vài ms) dẫn đến tăng cao tốc độ sản xuất.
- Cấu trúc dạng modul cho phép dễ dàng thay thế, tăng khả năng nối thêm modul mở rộng vào/ra và thêm chức năng ( các modul chuyên dùng)
- Chi phí lắp đặt thấp.
- Độ tin cậy cao.
- Chương trình điều khiển có thể in ra giấy trong vài phút giúp thuận tiện cho vấn đề bảo trì và sữa chữa hệ thống.
- Yêu cầu của người lập trình không cần giỏi về kiến thức điện tử mà chỉ cần nắm vững công nghệ sản xuất và biết chọn thiết bị thích hơp là có thể lập trình được.
- Khả năng chống nhiễu tốt.
- Nhưng nhược điểm của nó là nếu áp dụng để điều khiển trong những khâu nhỏ hay đơn giản thì giá thành cao hơn.
FKết luận : Với các phương pháp đã nêu ở trên ta thấy rằng phương pháp thích họp nhất là dùng PLC vì giảm số lượng Rơle điều khiển, không quá phức tạp về mạch điện tử, PLC có tích hợp sẵn chuẩn truyền RS485 để giao tiếp với biến tần, có khả năng chẩn đoán giúp cho công tác sữa chữa, có các thư viện đặc biệt chuyên dùng để giao tiếp với biến tần do đó chương trình viết đỡ phức tạp hơn … Tuy giá thành cao hơn so với các giải pháp khác nhưng có tính ổn định hơn. Vì những lý do trên nên trong phạm vi đề tài này ta lựa chọn giải pháp điều khiển bằng PLC.
CHƯƠNG 3
GIỚI THIỆU CHUNG VỀ PLC
3.1 Giới thiệu về PLC
Thiết bị điều khiển logic khả trình (Programable Logic Control, viết tắt là PLC) là loại thiết bị cho phép thực hiện linh hoạt các thuật toán điều khiển số thông qua một ngôn nhữ lập trình. Thay cho việc thực hiện thuật toán đó bằng mạch số như vậy với chương trình điều khiển PLC trở thành một bộ điều khiển số nhỏ gọn dễ dàng thay đổi thuật toán và đặc biệt dễ trao đổi thông tin với môi trường xung quanh ( với các PLC khác hay máy tính). Toàn bộ chương trình điều khiển được lưu trong bộ nhớ của PLC và được thiết lập theo chu kỳ vòng quét.
Để có thể thực hiện được một chương trình điều khiển, tất nhiên PLC có tính năng như một máy tính. Nghĩa là phải có một bộ vi xử lý ( PLC), một hệ điều hành, bộ nhớ để lưu chương trình điều khiển, dữ liệu và tất nhiên phải có cổng đầu vào/ra để giao tiếp được với đối tượng điều khiển và trao đổi thông tin với môi trường xung quanh. Bên cạnh đó PLC còn có thêm các khối chức năng đặc biệt khác như bộ đếm (Counter), bộ thời gian ( Timer) và các khối chuyên dụng khác.
3.2 Cấu trúc của PLC
Thiết bị điều khiển Logic lập trình PLC là thiết bị điều khiển đặc biệt dựa trên bộ vi xử lý, sử dụng bộ nhớ lập trình được để lưu trữ các lệnh và thực hiện các chức năng: phép logic, lập chuỗi, định giờ, đếm, thuật toán để điề khiển máy và các quá trình.
Hình 3.1 Sơ đồ cấu trúc của PLC
PLC gồm ba khối chức năng cơ bản:
- Bộ xử lý trung tâm.
- Bộ nhớ.
- Khối vào ra.
Trạng thái ngõ vào của PLC được phát hiện và lưu vào bộ nhớ đệm. PLC thực hiện các lệnh logic trên các trạng thái của chúng và thông qua trạng thái ngõ ra và cập nhật và lưu vào bộ nhớ đệm. Sau đó trạng thái ngõ ra trong bộ nhớ đệm được dùng để đóng mở các tiếp điểm kích hoạt các thiết bị công tắc.Như vậy, sự hoạt động các thiết bị được điều khiển hoàn toàn tự động heo chương trình trong bộ nhớ. Chương trình được nạp vào PLC qua thiết bị lập trình chuyên dụng.
3.2.1 Bộ xử lý trung tâm
Bộ xử lý trung tâm điều khiển và quản lý hoạt động bên trong PLC.Việc trao đổi thông tin giữa CPU, bộ nhớ và khối vào, ra được thực hiện thông qua hệ thống bus dưới sự điều khiển của CPU. Một mạch dao động thạch anh cung cấp xung clock tần số chuẩn cho CPU, thường là 1 hay 8 MKz,tùy thuộc vào bộ xử lý sử dụng.Tần số xung clock xác định tốc độ hoạt động của PLC và thực sự đồng bộ cho tất các phần tử trong hệ thống.
3.2.2 Bộ nhớ
Bộ nhớ có nhiệm vụ lưu chương trình điều khiển được lập bởi người dùng và các dữ liệu khác như cờ, thanh ghi tạm, trạng thái đầu vào, lệnh điều khiển đầu ra… Nội dung của bộ nhớ được mã hóa dưới dạng mã nhị phân.
Tất cả PLC S7-200 đều thường dùng các loại bộ nhớ sau: bộ nhớ EEPROM, nó kết hợp 2 ưu điểm của RAM và EPROM, loại này có thể xóa và nạp bằng tín hiệu điện.Tuy nhiên số lần nạp cũng có giới hạn.
3.2.3 Khối vào ra
Mọi hoạt động xử lý tín hiệu bên trong PLC có mức điện áp 5VDC và 15VDC (điện áp cho TTL và CMOS) trong khi tín hiệu bên ngoài có thể lớn hơn nhiều thường là 24VDC đến 240VDC với dòng lớn.
Khối vào, ra có vai trò mạch giao tiếp giữa vi điện tử của PLC với các mạch công suất bên ngoài kích hoạt các cơ cấu tác động.Nó thực hiện sự chuyển đổi các mức điện áp tín hiệu và cách ly, tuy nhiên khối vào ra cho phép PLC kết nối trực tiếp với các cơ cấu tác động có công suất cỡ nhỏ cỡ 2A trở xuống,không cần các mạch công suất trung gian hay Rơle trung gian
Hình 3.2: Sơ đồ cấu trúc tổng quan của PLC
3.3 Phân loại PLC
Hiện nay trong lĩnh vực điều khiển nói chung và ngành tự động hóa nói riêng,các PLC mới được đưa vào sử dụng ngày càng nhiều. Có nhiều hãng sản xuất PLC như : Mitsubishi,Omrom, Siemens, Telemecanique,LS … Trong đó PLC của hãng Siemens gồm các loại như :
- CPU S7 200:
CPU 21x: 210; 212; 214; 215-2DP; 216.
CPU 22x: 221; 222; 224; 224XP; 226; 226XM.
- CPU S7300
- CPU S7400
- Logo
Nhưng trong đề tài này ta chỉ nghiên cứu về PLC S7-200 . Vì PLC S7-200 có tích hợp sẵn thư viện giao tiếp với biến tần, có thể lập trình đồng hồ thời gian thực, và quan trọng là giá rẻ hơn so với các PLC trên.
3.4 Thiết bị điều khiển PLC S7-200
3.4.1 Tổng quan về họ PLC S7-200 của hãng Siemens:
Hình 3.3: Tổng quan về họ PLC s7_200 của hãng Siemens:
1. Các đèn trạng thái:
• Đèn RUN-màu xanh: Chỉ định PLC ở chế độ làm việc và thực hiện chương trình
đã được nạp vào bộ nhớ chương trình.
• Đèn STOP-màu vàng: Chỉ định PLC ở chế độ STOP, dừng chương trình đang
thực hiện lại (các đầu ra đều ở chế độ off).
• Đèn SF-màu đỏ, đèn báo hiệu hệ thống bị hỏng có nghĩa là lỗi phần cứng hoặc
hệ điều hành. Ở đây cần phân biệt rõ lỗi hệ thống với lỗi chương trình người dùng,
khi lỗi chương trình người dùng thì CPU không thể nhận biết được vì trước khi
download xuống CPU, phần mềm lập trình đã làm nhiệm vụ kiểm tra trước khi
dịch sang mã máy.
• Đèn Ix.x-màu xanh: Chỉ định trạng thái On/Off của đầu vào số.
• Đèn Qx.x-màu xanh: Chỉ định trạng thái On/Off của đầu vào số.
• Port truyền thông nối tiếp: RS 485 protocol, 9 chân sử dụng cho việc phối
ghép với PC, PG, TD200, TD200C, OP, mạng biến tần, mạng công nghiệp.
Tốc độ truyền - nhận dữ liệu theo kiểu PPI là 9600 baud.
Tốc độ truyền - nhận dữ liệu theo kiểu Freeport là 300 ÷ 38400 baud.
2. Công tắc chọn chế độ:
• Công tắc chọn chế độ RUN: Cho phép PLC thực hiện chương trình, khi chương
trình gặp lỗi hoặc gặp lệnh STOP thì PLC sẽ tự động chuyển sang chế độ STOP
mặc dù công tắc vẫn ở chế độ RUN (nên quan sát đèn trạng thái).
• Công tắc chọn chế độ STOP: Khi chuyển sang chế độ STOP, dừng cưỡng bức
chương trình đang chạy, các tín hiệu ra lúc này đều về off.
• Công tắc chọn chế độ TERM: cho phép người vận hành chọn một trong hai chế
độ RUN/STOP từ xa, ngoài ra ở chế độ này được dùng để download chương trình
người dùng.
3. Vít chỉnh định tương tự: Mỗi CPU có từ 1 đến 2 vít chỉnh định tương tự, có thể xoay được một góc 270°, dùng để thay đổi giá trị của biến sử dụng trong chương trình.
4. Pin và nguồn nuôi bộ nhớ: Sử dụng tụ vạn năng và pin. Khi năng lượng của tụ bị cạn kiệt PLC sẽ tự động chuyển sang sử dụng năng lượng từ pin.
Có hai series: 21x (loại cũ không còn sản xuất nữa) và 22x (loại mới). Về mặt tính
năng thì loại mới có ưu điểm hơn nhiều. Bao gồm các loại CPU sau: 221, 222, 224,
224XP, 226, 226XM trong đó CPU 224XP có hỗ trợ analog I/O onboard và 2 port truyền thông.
Bảng 3.1: Các loại CPU S7-200.
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
Những kết quả đạt được
Sau một thời gian nghiên cứu và làm việc một cách nghiêm túc cùng vơi sự giúp đỡ, chỉ bảo, đóng góp ý kiến của thầy và các thầy cô giáo trong Khoa Điện - Điện lạnh cùng các bạn trong lớp, đến nay em đã hoàn thành đề tài. Với đề tài điều khiển duy trì mực nước (áp suất) có nhiều phương pháp để thực hiện, nhưng trong phạm vi đề tài này em sử dụng biến tần, PLC và cảm biến áp suất để điều khiển duy trì mực nước(áp suất). Trong quá trình thực hiện đề tài em đã vận dụng được những kiến thức đã học, tự mình đánh giá được trình độ bản thân, nghiên cứu và học hỏi tìm ra phương án giải quyết, tiếp cận với những thiết bị thực tế. Sau một thời gian thực hiện đề tài chúng em đã đạt được những kết quả sau: thiết kế chế tạo mô hình, lắp ráp hoàn chỉnh mô hình, vận hành và kiểm tra theo đúng quy trình công nghệ, mô hình đảm bảo đáp ứng các yêu cầu đặt ra.
Tuy nhiên do thời gian có hạn và trình độ còn hạn chế do đó phần lập trình điều khiển PLC S7-200 của em vẫn chưa được tối ưu nhất,vẫn chưa dùng hết những chức năng của biến tần. Thông qua quá trình thực hiện đề tài em dần làm quen với cách làm việc độc lập cũng như phối hợp làm việc theo nhóm và dần biết cách tổ chức công việc và sắp xếp thời gian hợp lý.
HƯỚNG PHÁT TRIỂN
Với sự phát triển của quá trình đô thị hoá ngày nay, ở các đô thị mức độ tập trung dân cư lớn. Giải pháp đưa ra để giải quyết vấn đề nhà cao tầng là một trong những phương án hiệu quả nhất. Như thế có một vấn đề được đặt ra là làm sao có thể cung cấp nước cho các khu dân cư nói chung và các khu nhà cao tầng nói riêng mà vẫn đảm bảo áp suất trên đường ống trong giới hạn cho phép. Do vậy chế tạo và thiết kế các hệ thống điều khiển duy trì áp suất ứng dụng trong cung cấp nước sạch là một vấn đề cấp thiết trong công cuộc đô thị hoá ngày nay. Sau một thời gian nghiên cứu tìm hiểu em đã tiến hành thiết kế chế tạo thành công hệ thống duy trì mực nước ( áp suất) ứng dụng trong cung cấp nước. Trong phạm vi đề tài này, em sử dụng các thiết bị điều khiển là biến tần MicroMaster 440 và PLC S7 – 200 của hãng Siemens. Sở dĩ em lựa chọn các thiết bị này là vì em mong muốn được nghiên cứu tìm hiểu và ứng dụng những kiến thức được học vào trong đề tài như: cách thức truyền thông giữa các thiết bị (trong đề tài này là cách thức truyền thông giữa biến tần với PLC – giao thức USS), các ứng dụng của biến tần vào trong điều khiển động cơ, khẳ năng tự duy trì áp suất của biến tần(biến tần MM440 có bộ PID). Những vấn đề đó hoàn toàn là những kiến thức mới mà chỉ có ngoài thực tiễn sinh viên chúng em mới được tiếp cận. Trong quá trình thực hiện đề tài em gặp rất nhiều khó khăn trong việc tìm nguồn tài liệu (vì nguồn tài liệu chủ yếu là tiếng anh nên rất hạn chế với sinh viên kỹ thuật), nguồn vật tư để chế tạo mô hình, và một điều quan trọng là chúng em thiếu kinh nghiệm thực tế. Với kiến thực hạn chế kinh nghiệm non kém và thời gian có hạn nên em chưa hoàn thiện được đề tài một cách hoàn thiện nhất như chưa tận dụng hết được khẳ năng của biến tần và PLC (chưa dùng phần tử nhiệt để bảo vệ động cơ, chưa dùng thời gian thực để điều khiển hệ thống), chưa thiết kế được phần giám sát điều khiển hệ thống thông qua PC.
Đề tài em thực hiện ở đây chỉ mang tính nghiên cứu, vận dụng các kiến thức đã học để thực hiện nên còn thiếu tính thực tế. Bởi vì với phạm vi chỉ điều khiển động cơ duy trì áp suất ta chỉ cần sử dụng PLC – biến tần thông thường ( có ngõ vào , ra analog )là đủ. Vì ta có thể dùng tín hiệu của cảm biến nối vào ngõ vào analog của PLC,lấy tín hiệu từ ngõ ra analog của PLC đưa vào biến tần để điều khiển tốc độ động cơ. Và hơn nữa trong PLC Siemens có tích hợp sẵn bộ PID rất tiện dụng. Do vậy giá thành sẽ giảm đi mà vẫn đảm bảo đáp ứng được yêu cầu công nghệ.
Sau một thời gian thực hiện đề tài em nhận thấy rằng việc tiếp cận với các thiết bị mới và hiện đại đối với sinh viên còn hết sức mới mẻ. Nên em rất mong muốn được nghiên cứu và tìm hiểu các đề tài mang tính thời sự, để nâng cao khả năng tiệp cận thực tiễn, tích luỹ kinh nghiệm để không khỏi bỡ ngỡ khi tham gia vào quá trình sản xuất công nghiệp.
Cuối cùng em xin chân thành cảm ơn các thầy cô giáo trong Khoa Điện – Điện lạnh, đặc biệt là thầy