ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ BỘ LỌC SỐ THÔNG DẢI CÓ DẢI THÔNG 800 KHZ - 1200 KHZ
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ BỘ LỌC SỐ THÔNG DẢI CÓ DẢI THÔNG 800 KHZ - 1200 KHZ
THIẾT KẾ BỘ LỌC SỐ THÔNG DẢI CÓ DẢI THÔNG 800 KHZ - 1200 KHZ
MỤC LỤC
LỜI MỞ ĐẦU 1
CHƯƠNG 1 TỔNG QUAN VỀ BỘ LỌC SỐ 2
1.1 Giới thiệu chương 2
1.2 Tổng quan về bộ lọc số 3
1.2.1 Hàm truyền đạt 4
1.2.2 Đặc tuyến tần số 6
1.2.2.1 Bộ lọc lý tưởng 7
1.2.2.2 Bộ lọc thực tế 9
1.3 Các bước để thiết kế một bộ lọc số 10
1.4 Kết luận chương 11
CHƯƠNG 2 BỘ LỌC SỐ FIR 12
2.1 Giới thiệu chương 12
2.2 Các đặc tính của bộ lọc FIR pha tuyến tính 12
2.2.1 Đáp ứng xung h(n) 12
2.2.2 Đáp ứng tần số H(ejω) 14
2.3 Các phương pháp thiết kế bộ lọc FIR có pha tuyến tính 16
2.3.1 Phương pháp cửa sổ 16
2.3.1.1 Cửa sổ chữ nhật 18
2.3.1.2 Cửa sổ tam giác 18
2.3.1.3 Cửa sổ Hanning 18
2.3.1.4 Cửa sổ Hamming 18
2.3.1.5 Cửa sổ Blackman 19
2.3.1.6 Cửa sổ Kaiser 19
2.3.2 Phương pháp lấy mẫu tần số 20
2.3.3 Phương pháp xấp xỉ tối ưu cân bằng gợn sóng 23
2.4 Cấu trúc của bộ lọc FIR 27
2.4.1 Cấu trúc dạng trực tiếp 27
2.4.2 Cấu trúc dạng ghép tầng 28
2.4.3 Cấu trúc dạng pha tuyến tính 28
2.5 Kết luận chương 29
CHƯƠNG 3 BỘ LỌC SỐ IIR 31
3.1 Giới thiệu chương 31
3.2 Đặc tính của bộ lọc nguyên mẫu tương tự 32
3.2.1 Bộ lọc Butterworth 32
3.2.2 Bộ lọc Chebyshev 34
3.2.2.1 Bộ lọc Chebyshev loại I 35
3.2.2.2 Bộ lọc Chebyshev loại II 36
3.2.3 Bộ lọc Elliptic 37
3.3 Các phương pháp tổng hợp bộ lọc số IIR từ bộ lọc tương tự 38
3.3.1 Nguyên tắc 38
3.3.2 Phương pháp bất biến xung (Impulse invariance) 39
3.3.3 Phương pháp biến đổi song tuyến tính (Bilinear transformation ) 41
3.3.4 Phương pháp tương đương vi phân (Approximation of derivatives ) 43
3.3.5 Phương pháp biến đổi z tương thích (Matched-z transformation) 44
3.4 Biến đổi băng tần 45
3.5 Cấu trúc bộ lọc số IIR 48
3.5.1 Cấu trúc bộ lọc số IIR dạng trực tiếp 48
3.5.2 Cấu trúc bộ lọc số IIR dạng ghép tầng 50
3.5.3 Cấu trúc bộ lọc số IIR dạng song song 51
3.6 Kết luận chương 52
CHƯƠNG 4 TÍNH TOÁN THIẾT KẾ VÀ MÔ PHỎNG BỘ LỌC SỐ THÔNG DẢI CÓ DẢI THÔNG 800KHZ – 1200KHZ 54
4.1 Giới thiệu chương 54
4.2 Thiết kế bộ lọc số FIR 54
4.2.1 Tính toán thiết kế 54
4.2.1.1 Phương pháp cửa sổ 54
4.2.1.2 Phương pháp lấy mẫu tần số 56
4.2.2 Phần mô phỏng 56
4.2.2.1 Lưu đồ thuật toán 57
4.2.2.2 Kết quả mô phỏng 59
4.3 Thiết kế bộ lọc số IIR 63
4.3.1 Tính toán thiết kế 63
4.3.1.1 Sử dụng bộ lọc Butterworth 64
4.3.1.2 Sử dụng bộ lọc Chebyshev1 66
4.3.1.3 Sử dụng bộ lọc Chebyshev2 68
4.3.2 Kết quả mô phỏng 71
4.4 Kết luận chương 76
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI 77
TÀI LIỆU THAM KHẢO 78
PHỤ LỤC 79
CHƯƠNG 1 TỔNG QUAN VỀ BỘ LỌC SỐ
1.1 Giới thiệu chương
Quá trình lọc tín hiệu nhằm tiến hành việc phân bố lại các thành phần tần số của tín hiệu. Quá trình này được thực hiện thông qua các bộ lọc. Các bộ lọc được sử dụng nhằm hai mục đích sau:
- Phân tích tín hiệu được áp dụng khi tín hiệu mong muốn bị giao thoa với các tín hiệu khác hay nói cách khác là bị các loại nhiễu tác động vào.
- Phục hồi tín hiệu: khi tín hiệu ta mong muốn hay cần đánh giá bị sai lệch đi bởi nhiều yếu tố của môi trường tác động vào, làm cho nó bị biến dạng gây ảnh hưởng đến kết quả đánh giá.
Có hai kiểu bộ lọc chính:
- Bộ lọc tương tự là một mạch điện tử tương tự bao gồm: điện trở, tụ điện, bộ khuyếch đại thuật toán, ghép với nhau theo một sơ đồ cụ thể.
- Bộ lọc số thường dùng một chip DSP để xử lý, thậm chí là máy tính, tuy nhiên trước khi có thể xử lý tín hiệu thì tín hiệu phải đi qua bộ ADC, và sau khi xử lý xong thì đi qua bộ DAC.
Ưu điểm của bộ lọc tương tự là giá thành rẻ, tác động nhanh, dải động (Dynamic Range) về biên độ và tần số đều rộng.
Tuy nhiên các bộ lọc số thì có ưu điểm vượi trội hơn hẳn so với lọc tương tự:
- Bộ lọc số thì có khả năng lập trình được, còn một bộ lọc tương tự muốn thay đổi cấu trúc phải thiết kế lại bộ lọc
- Các bộ lọc số dễ dàng thiết kế, dễ kiểm tra và dễ thi hành trên một máy tính.
- Bộ lọc tương tự thường nhạy cảm với sự thay đổi của nhiệt độ, độ ẩm... phụ thuộc lớn vào sai số của các linh kiện. Các bộ lọc số thì không gặp phải vấn đề này, và rất ổn định với cả thời gian và nhiệt độ.
- Các bộ lọc số linh hoạt hơn nhiều trong xử lý tín hiệu, với nhiều cách khác nhau hay chính là khả năng thích nghi tốt hơn so với bộ lọc tương tự.
- Các bộ xử lý DSP nhanh có thể xử lý các tổ hợp phức tạp, phần cứng lại tương đối đơn giản, và có mật độ tích hợp cao.
1.2 Tổng quan về bộ lọc số
Các quá trình hoạt động của một bộ lọc số thể hiện như hình dưới:
Hình 1.1: Quá trình hoạt động của bộ lọc số
Bộ lọc số là hệ thống tuyến tính bất biến theo thời gian. Đặc trưng bởi một đáp ứng xung và một đáp ứng tần số. Mỗi đáp ứng đều chứa đầy đủ thông tin về bộ lọc nhưng ở dạng khác nhau. Nếu có được một trong hai đáp ứng thì có thể suy ra đáp ứng kia bằng cách tính toán trực tiếp. Đáp ứng xung là đầu ra của hệ thống khi đầu vào là xung đơn vị. Còn đáp ứng tần số là từ phép biến đồi Fourier của đáp ứng xung.
Hình 1.2: Đáp ứng xung của hệ thống
Hình 1.3: Đáp ứng tần số của hệ thống
1.2.1 Hàm truyền đạt
Trong miền thời gian, một hệ thống LTI được đặc trưng bởi đáp ứng xung h(n) của nó. Với tín hiệu vào x(n) cho trước, đáp ứng của hệ thống được tính bằng phép chập:
Hoặc bằng phương trình sai phân tuyến tính hệ số hằng:
Trong miền z, phép chập được chuyển thành phép nhân. Qua biến đổi z công thức (1.1) trở thành:
Với X(z) là biến đổi z của tín hiệu vào x(n).
H(z) là hàm truyền đạt của hệ thống.
Biến đổi z hai phía đối với phương trình sai phân (1.2):
Suy ra:
Nếu a0 = 1, ta được:
Điều kiện để hệ thống ổn định:
Trong miền thời gian rời rạc n:
Trong miền z:
Một hệ thống LTI nhân quả là ổn định nếu và chỉ nếu tất cả các điểm cực của hàm truyền đạt H(z) phải nằm bên trong đường tròn đơn vị.
Nếu xét về đáp ứng xung có thể chia các bộ lọc số thành 2 loại chính: Bộ lọc có đáp ứng xung hữu hạn FIR (Finite Impulse Response) còn gọi là bộ lọc không đệ quy, và bộ lọc có đáp ứng xung vô hạn IIR (Infinte Impulse Response) còn gọi là bộ lọc đệ quy.
Bộ loc đáp ứng xung hữu hạn FIR:
Nếu các hệ số trong phương trình (1.6) bằng 0, ta có phương trình sai phân sẽ có dạng:
Theo (1.8):
Hệ thống FIR có thể có chính xác pha tuyến tính. Do đó thường rất hữu ích trong các ứng dụng xử lý tiếng nói khi yêu cầu xác định thứ tự thời gian là cần thiết.
Các phương pháp thường được sử dụng để thiết kế bộ lọc số FIR là: phương pháp cửa sổ, phương pháp lấy mẫu tần số và phương pháp xấp xỉ tối ưu.
Bộ lọc đáp ứng xung vô hạn IIR
Hệ thống IIR bao gồm cả điểm không và điểm cực, phương trình sai phân (1.2) có thể được viết lại như sau:
Hệ thống IIR có đáp ứng xung chiều dài vô hạn nhưng do công thức truy hồi (1.9) nên nó sử dụng ít phép tính hơn so với khi thiết kế hệ thông FIR.
Sự khác nhau nữa là hệ thống IIR không thể có pha tuyến tính chính xác như hệ thống FIR. Phương pháp thiết kế chung nhất là dựa trên những biến đổi thiết kế tương tự.
1.2.2 Đặc tuyến tần số
Việc thiết kế bộ lọc thực tế đều đi từ lý thuyết các bộ lọc số lý tưởng. Chúng ta sẽ nghiên cứu 4 bộ lọc số lý tưởng tiêu biểu là:
- Bộ lọc số thông thấp lý tưởng.
- Bộ lọc số thông cao lý tưởng.
- Bộ lọc số thông dải lý tưởng.
- Bộ lọc số chắn dải lý tưởng.
1.2.2.1 Bộ lọc lý tưởng
Hình 1. 4: Đáp ứng biên độ của bộ lọc thông thấp lý tưởng.[1]
Đáp ứng xung h(n) của bộ lọc thông thấp lý tưởng pha 0.
Bộ lọc thông cao lý tưởng:
Hình 1. 5: Đáp ứng biên độ của bộ lọc thông cao lý tưởng.[1]
Đáp ứng xung h(n) của bộ lọc thông cao lý tưởng pha 0.
Đáp ứng xung h(n) của bộ lọc chắn dải lý tưởng pha 0.
1.2.2.2 Bộ lọc thực tế
Xét một bộ lọc số thông thấp làm ví dụ:
Hình 1. 8: Đáp ứng biên độ của bộ lọc số thông thấp thực tế[1]
Có 4 tham số quyết định đến chỉ tiêu của bộ lọc số:
- Tần số giới hạn dải thông .
- Tần số giới hạn dải chắn .
- Độ gợn sóng dải thông .
- Độ gợn sóng dải chắn .
Về mặt lý tưởng các độ gợn sóng trong dải thông và dải chặn cảng nhỏ càng tốt, tần số giới hạn dải thông và dải chặn gần nhau để cho dải quá dộ càng nhỏ càng tốt. Tuy nhiên trong thực tế thì các tham số này nghịch nhau, để độ gợn nhỏ thì dải quá dộ phải lớn nên tùy theo yêu cầu của từng trường hợp cụ thể ta lựa chọn cách thiết kế phù hợp.
1.3 Các bước để thiết kế một bộ lọc số [7]
Việc thiết kế một bộ lọc số tiến hành theo 3 bước:
- Đưa ra các chỉ tiêu (Specifications): Để thiết kế một bộ lọc, đầu tiên chúng ta cần xác định các chỉ tiêu. Các chỉ tiêu được xác định theo yêu cầu của người dùng.
- Tìm các xấp xỉ (Appproximations): Một khi chỉ tiêu đã được xác định, sử dụng các khái niệm và công cụ toán học khác nhau để tiến tới biểu diễn và tính gần đúng cho bộ lọc với tập các chỉ tiêu đã cho. Bước này là chủ đề chính của việc thiết kế lọc số.
- Thực hiện bộ lọc (Implementation): Kết quả của các bước trên được mô tả dưới dạng một phương trình sai phân, hoặc một hàm hệ thống H(z), hoặc một đáp ứng xung h(n). Từ các mô tả này chúng ta có thể thi hành bộ lọc bằng phần cứng hoặc phần mềm mô phỏng trên máy tính.
Với bộ lọc FIR có thể đạt được chính xác yêu cầu về pha tuyến tính. Còn bộ lọc IIR, một dải thông có pha tuyến tính là rất khó đạt. Do đó, chúng ta chỉ xét các chỉ tiêu về biên độ.
Hình 1.9: Các chỉ tiêu bộ lọc số (a) tuyệt đối (b) tương đối [7]
Có 2 loại chỉ tiêu:
- Các chỉ tiêu tuyệt đối bao gồm: .
- Các chỉ tiêu tương đối bao gồm: Rp là độ gợn sóng trong dải thông tính theo dB và As là suy hao trong dải chắn tính theo dB.
Mối quan hệ giữa hai loại chỉ tiêu:
1.4 Kết luận chương
Có hai kiểu lọc chính là lọc tương tự và lọc số. Các bộ lọc số được sử dụng rộng rãi trong thực tế nhờ những ưu điểm vượt trội so với các bộ lọc tương tự như:
• Một bộ lọc số có thể được lập trình nên trở nên linh hoạt và dễ sửa đổi thông số
• Rất ổn định với cả thời gian và nhiệt độ.
• Các bộ lọc số linh hoạt hơn nhiều trong xử lý tín hiệu, với nhiều cách khác nhau hay chính là khả năng thích nghi tốt hơn so với bộ lọc tương tự.
• Các bộ xử lý DSP nhanh có thể xử lý các tổ hợp phức tạp, phần cứng lại tương đối đơn giản, và có mật độ tích hợp cao.
Bộ lọc số có hai chức năng chính là phân tích tín hiệu và phục hồi tín hiệu.
Nếu xét về đáp ứng xung có thể chia các bộ lọc số thành 2 loại chính là bộ lọc có đáp ứng xung hữu hạn FIR (Finite Impulse Response) và bộ lọc có đáp ứng xung vô hạn IIR (Infinte Impulse Response).
Xét về đáp ứng tần số biên độ có thể chia các bộ lọc thành 4 loại cơ bản: Thông thấp, thông cao, thông dải và chắn dải.
Việc thiết kế bộ lọc thực tế đều đi từ lý thuyết các bộ lọc số lý tưởng. Có 4 loại chỉ số tuyệt đối là và 2 loại chỉ số tương đối là .
1. Giới thiệu
Ngày nay, chúng ta tiếp xúc với rất nhiều loại tín hiệu và dưới nhiều dạng khác nhau như: âm thanh, hình ảnh hay các tín hiệu thông tin liên lạc, hệ thống điều khiển rađa, địa chất và khí tượng ... Bên cạnh các tín hiệu có ích cũng luôn tồn tại các tín hiệu không cần thiết trong hoàn cảnh riêng nào đó, mà ta gọi đó là nhiễu. Do vậy lĩnh vực xử lý tín hiệu mỗi ngày càng phát triển mạnh. Sử dụng bộ lọc số ta có thể làm được rất nhiều điều với tín hiệu số như: để loại đi thành phần làm bẩn tín hiệu như nhiễu, loại bỏ méo xuyên giữa các kênh truyền dẫn hoặc sai lệch trong đo lường, để phân tách hai hoặc nhiều tín hiệu riêng biệt đã được trộn lẫn theo chủ định nhằm cực đại hoá sự sử dụng kênh truyền, để phân tích các tín hiệu trong các thành phần tần số của chúng, hay đơn giản nhất là lấy đi một phần phổ tín hiệu mà ta mong muốn. Trong khuôn khổ đồ án này em xin phép được trình bày về các phương pháp để thiết kế một bộ lọc số thỏa mãn yêu cầu cho trước.
2. Tổng quan về bộ lọc số
Có hai kiểu lọc chính là lọc tương tự và lọc số. Các bộ lọc số được sử dụng rộng rãi trong thực tế nhờ những ưu điểm vượt trội so với các bộ lọc tương tự. Bộ lọc số có hai chức năng chính là phân tích tín hiệu và phục hồi tín hiệu. Nếu xét về đáp ứng xung có thể chia các bộ lọc số thành 2 loại chính là bộ lọc có đáp ứng xung hữu hạn FIR và bộ lọc có đáp ứng xung vô hạn IIR. Xét về đáp ứng tần số biên độ có thể chia các bộ lọc thành 4 loại cơ bản: thông thấp, thông cao, thông dải và chắn dải. Việc thiết kế bộ lọc thực tế đều đi từ lý thuyết các bộ lọc số lý tưởng. Có 4 loại chỉ tiêu tuyệt đối là và 2 loại chỉ tiêu tương đối là .
3. Bộ lọc số FIR
Thiết kế bộ lọc FIR có ba phương pháp: Phương pháp cửa sổ: cắt (nhân với hàm cửa sổ) đáp ứng xung bộ lọc lý tưởng (vô hạn, không nhân quả) để thu được đáp ứng xung bộ lọc FIR có pha tuyến tính, nhân quả. Hai là phương pháp lấy mẫu tần số: ta làm gần đúng đáp ứng tần số của bộ lọc lý tưởng Hd(ejω) bằng một hàm H(ejω) của bộ lọc thực tế. H(ejω) nhận được qua việc nội suy giữa các mẫu H(k) lấy trên Hd(ejω) tại các tần số . Ba là phương pháp tối ưu: Phương pháp xấp xỉ tối ưu là phương pháp tốt nhất trong 3 phương pháp thiết kế nhưng phải trả giá cho việc đó là quá trình tính toán phức tạp cần có sự trợ giúp của máy tính.
4. Bộ lọc số IIR
Có 3 phương pháp để xác định hàm truyền của bộ lọc tương tự Ha(s): Butterworth, Chebyshev và Elliptic. Khi có có được hàm truyền tương tự ta sẽ ánh xạ sang miền số để có được bộ lọc số IIR theo 4 phương pháp sau: Phương pháp bất biến xung: Xác định đáp ứng xung của bộ lọc số bằng cách lấy mẫu đáp ứng xung của bộ lọc tương tự. Phương pháp biến đổi song tuyến tính: Phép ánh xạ mặt phẳng s của bộ lọc tương tự sang mặt phẳng z của bộ lọc số. Phương pháp tương đương vi phân: Phép lấy gần đúng phương trình vi phân bằng một phương trình sai phân tương đương. Phương pháp biến đổi z tương thích: Đối với phương pháp này điểm không và điểm cực của Ha(s) được ánh xạ trực tiếp thành điểm không và điểm cực trong mặt phẳng z bằng cách sử dụng một hàm mũ. Phép biến đổi băng tần giúp ta thiết kế các bộ lọc số khác nhau như bộ lọc thông cao, bộ lọc thông dải, bộ lọc chắn dải bằng cách sử dụng kết quả của bộ lọc thông thấp.
5. Tính toán và mô phỏng bộ lọc số thông dải có dải thông 800KHz – 1200KHz
Thiết kế bộ lọc số FIR
Cửa sổ Kaiser: Cửa sổ Hamming:
Nhận xét: Với cùng một yêu cầu thiết kế thì bộ lọc bằng cửa sổ Kaiser cho bậc M=45 nhỏ hơn nhiều so việc thiết kế sử dụng cửa sổ Hamming (M=415). Cửa sổ Kaiser cho ra kết quả As gần giống với yêu cầu bài toán so với cửa sổ Hamming.
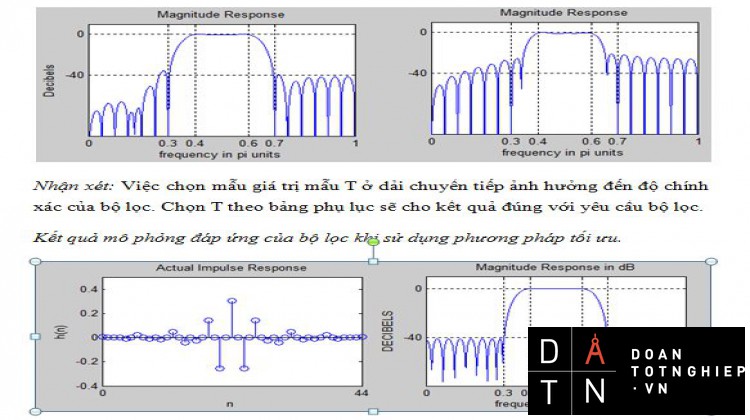
Kết quả mô phỏng đáp ứng của bộ lọc sử dụng lấy mẫu tần số
Chọn T1=0.42856445: Chọn T1=0.12856445:
Nhận xét: Việc chọn mẫu giá trị mẫu T ở dải chuyển tiếp ảnh hưởng đến độ chính xác của bộ lọc. Chọn T theo bảng phụ lục sẽ cho kết quả đúng với yêu cầu bộ lọc.
Kết quả mô phỏng đáp ứng của bộ lọc khi sử dụng phương pháp tối ưu.
Nhận xét: Việc sử dụng phương pháp lặp cho cho bộ lọc được thiết kế thỏa mãn tốt điều kiện bài toán đề ra.
Thiết kế bộ lọc số IIR
Hàm truyền của bộ lọc IIR thiết kế từ bộ lọc analog Butterworth:
Hàm truyền H(z) của bộ lọc IIR thiết kế từ bộ lọc analog Chebyshev I :
Hàm truyền của bộ lọc IIR thiết kế từ bộ lọc analog Chebyshev II:
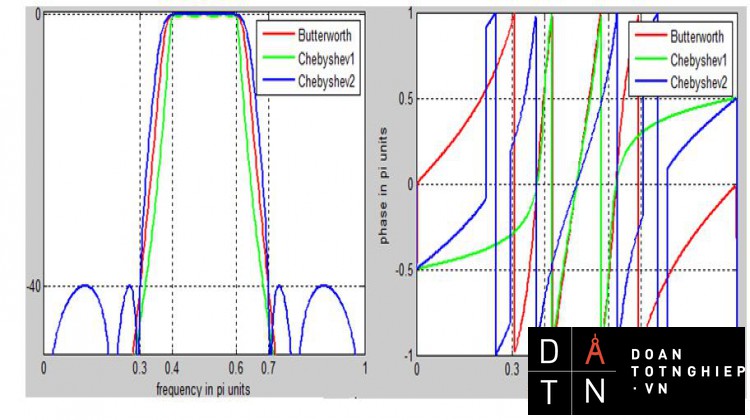
Đáp ứng biên độ và đáp ứng pha của các bộ lọc số được thiết kế từ các bộ lọc analog Butterworth, Chebyshev I, Chebyshev II:
Nhận xét: Với cùng yêu cầu thiết kế thì bộ lọc Chebyshev sẽ có ít điểm cực (bậc ít hơn) so với bộ lọc Butterworth. Cả 3 loại bộ lọc đề cho đáp ứng pha gần tuyến tính.Bộ lọc Chebyshev II có dải chuyển tiếp hẹp hơn so với bộ lọc Chebyshev I và Butterworth.
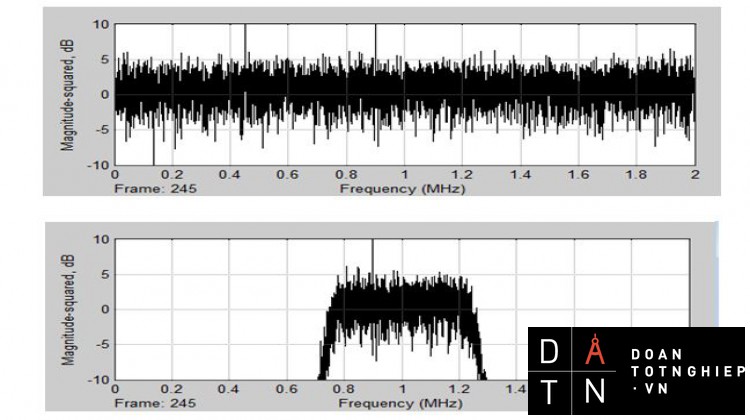
ChoTín hiệu 1: Tín hiệu sin rời rạc có tần số 900 KHz, Fs=4000 sample/s + Tín hiệu 2: Tín hiệu sin rời rạc có tần số 450 KHz, Fs=4000 sample/s + Tín hiệu 3: Tín hiệu sin rời rạc có tần số ngẫu nhiên, Fs=4000 sample/s.
Nhận xét: Hệ số của bộ lọc có được trong tính toán có giá trị gần đúng so với khi chạy mô phỏng bằng công cụ Matlab, các sai số này do sự làm tròn số trong quá trình tính toán và sai số nằm trong khoảng chấp nhận được. Tần số cắt của bộ lọc nằm trong khoảng 700 KHz đến 1300 KHz nên ngoài khoảng này tín hiệu sẽ bị chặn lại ta có được phổ của đầu ra như hình mô phỏng.
6. Kết luận và hướng phát triển đề tài
Đồ án đã trình bày được các đặc trưng, phương pháp để thiết kế một bộ lọc số FIR và IIR. Phần tính toán đã chỉ ra được đáp ứng xung hoặc hàm truyền của bộ lọc số từ đó có thể biểu diễn theo các dạng cấu trúc cho trước. Phần mô phỏng cho thấy bộ lọc được thiết kế ổn định (các điểm cực nằm trong đường tròn đơn vị ) và thỏa mãn yêu cầu thiết kế của đồ án (dải thông 800Khz-1200Khz). Tuy nhiên giới hạn của đề tài là mọi thông số của quá trình lọc dùng để xác định các đặc trưng của hệ thống coi như đã biết. Mà trong thực tế các thông số này có thể biến đổi theo thời gian. Vì vậy hướng phát triển của đề tài là nghiên cứu thiết kế bộ lọc số sao cho có thể tự thích nghi với hoàn cảnh.
...........
CÁC TỪ VIẾT TẮT
|
ADC |
Analog Digital Converter |
Chuyển đổi tương tự sang số |
|
BPF |
Band Pass Filter |
Bộ lọc thông dải |
|
BSF |
Band Stop Filter |
Bộ lọc chắn dải |
|
DAC |
Digital Analog Converter |
Chuyển đổi số sang tương tự |
|
DFT |
Discrete Fourier Transform |
Biến đổi Fourier rời rạc |
|
DSP |
Digital Signal Processing |
Xử lý tín hiệu số |
|
FIR |
Finite Impulse Response |
Đáp ứng xung hữu hạn |
|
HPF |
High Pass Filter |
Bộ lọc thông cao |
|
IDFT |
Inverse Discrete Fourier Transform |
Biến đổi Fourier rời rạc ngược |
|
IIR |
Infinite Impulse Response |
Đáp ứng xung vô hạn |
|
LHP |
Left Half Plane |
Nửa mặt phẳng bên trái |
|
LPF |
Low Pass Filter |
Bộ lọc thông thấp |
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI
Kết luận:
FIR và IIR là hai bộ lọc thường dùng trong xử lý tín hiệu số. FIR là từ viết tắt Finite Impulse Response nghĩa là đáp ứng xung hữu hạn, trong khi IIR là Infinite Impulse Response, đáp ứng xung vô hạn. Mặc dù cả IIR và FIR đều phục vụ cùng mục đích, nhưng mỗi loại lại có những ưu nhược điểm riêng. Với cùng tình huống lọc, FIR vận hành yêu cầu nhiều phép nhân và tổng hơn so với IIR. Bộ lọc FIR là không đệ quy trong khi IIR thì đệ quy. Do đó, trong FIR không có phản hồi feedback, còn trong IIR thì rất nhiều. IIR có số lượng hệ số ít hơn so với FIR, do đó mà tốn ít thời gian thực hiện các phép toán hơn. Nhưng bộ lọc FIR lại dễ thiết kế hơn. Sau nữa là về tính ổn định. Nếu được thiết kế đơn thuần, lọc IIR có thể không ổn định trong khi FIR thì luôn ổn định.
Đồ án đã trình bày được các đặc trưng, phương pháp thiết kế một bộ lọc số FIR và IIR thỏa mãn yêu cầu cho trước. Phần tính toán đã chỉ ra được đáp ứng xung hoặc hàm truyền của bộ lọc số từ đó có thể biểu diễn theo các dạng cấu trúc cho trước. Phần mô mỏng cho thấy bộ lọc được thiết kế ổn định (các điểm cực nằm trong đường tròn đơn vị) và thỏa mãn yêu cầu thiết kế của đồ án (dải thông từ 800khz-1200khz).
Hướng phát triển đề tài:
Giới hạn của đề tài là mọi thông số của quá trình lọc dùng để xác định các đặc trưng của hệ thống coi như đã biết. Tuy nhiên trong thực tế các thông số này có thể biến đổi theo thời gian, trong một số bài toán thực tiễn cho thấy một số thông số thường không ổn định và bản chất của sự biến thiên thì không tiên đoán được. Vì vậy hướng phát triển đề tài là nghiên cứu thiết kế bộ lọc sao cho có thể tự thích nghi với hoàn cảnh, có nghĩa là có thể tự điều chỉnh các hệ số trong bộ lọc để bù lại các thay đổi trong tín hiệu vào, tín hiệu ra, hoặc trong thông số của hệ thống.
TÀI LIỆU THAM KHẢO
[1] Đặng Hoài Bắc, “Xử lý tín hiệu số”, Học Viện Công Nghệ Bưu Chính Viễn Thông – Hà Nội 2006.
[2] Dương Tử Cường, “Xử lý tín hiệu số”, nhà xuất bản Quân Đội Nhân Dân - Hà Nội 2003.
[3] Nguyễn Thanh Duẩn, “Luận án Tìm hiểu simulink trong matlab”.
[4] Nguyễn Quốc Trung, “Xử lý tín hiệu và lọc số tập 1”, nhà xuất bản Khoa Học Kỹ Thuật – Hà Nội 2006.
[5] Nguyễn Quốc Trung, “Xử lý tín hiệu và lọc số tập 2”, nhà xuất bản Khoa Học Kỹ Thuật – Hà Nội 2003.
[6] Mamoukhov, “How to design analog filters - Chapter 4 Chebyshev approximation- Chapter5 Inverse Chebyshev approximation”, http://www.matheonics.com/tutorial.html.
[7] Vinay K.Ingle, John G.Proakis, “Digital Signal Processing using MatLab v4”.
[8] The Mathwork, “Filter design toolbox for use with matlab”.
[9] Zoran Milivojević, “Digital Filter Design- Chapter 3 IIR filter”, http://www.mikroe.com/chapters/view/73/chapter-3-iir-filters/.