ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON 2014 (MANUAL ROBOT)

NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOCON 2014 (MANUAL ROBOT)
MỤC LỤC
MỞ ĐẦU Trang
Chương 1: THIẾT KẾ VÀ THI CÔNG CƠ KHÍ. 1
1.2 KHUNG ĐẾ.. 1
1.3 KHỚP TRƯỢT DỌC.. 3
1.4 KHỚP TRƯỢT NGANG.. 5
1.4.1 Khớp trượt ngoài 5
1.4.2 Khớp trượt trong. 5
1.5 TAY GẮP. 7
1.6 GIỎ ĐỰNG PHÔI 8
1.7 CƠ CẤU BẮN MẦM... 9
1.7.1 Chế tạo mầm.. 9
1.7.2 Cơ cấu bắn mầm.. 9
1.8 CƠ CẤU ĐỊNH VỊ PHÔI 11
Chương 2: MẠCH ĐIỆN TỬ... 12
2.1 MẠCH VI ĐIỀU KHIỂN.. 12
2.1.1 Tổng quan về PIC 16F887. 12
2.1.2 Mạch điều khiển động cơ chính. 13
2.1.3 Mạch điều khiển cơ cấu. 14
2.1.4 Nguồn 5V.. 15
2.2 MẠCH CÔNG SUẤT CHÍNH.. 15
2.2.1 Relay. 16
2.2.2 MOSFET.. 17
2.3 MẠCH CÔNG SUẤT PHỤ.. 17
2.4 MẠCH CẢM BIẾN HÀNH TRÌNH.. 18
Chương 3: GIẢI THUẬT LẬP TRÌNH.. 19
3.1 LƯU ĐỒ TỔNG QUÁT.. 19
3.1.1 Sơ đồ tổng quát mạch điện tử. 19
3.1.2 Sơ đồ chiến thuật 20
3.2 LƯU ĐỒ PIC ĐIỀU KHIỂN CƠ CẤU.. 21
3.2.1 Chương trình chính. 21
3.2.2 Chương trình ngắt 22
3.2 LƯU ĐỒ PIC ĐIỀU KHIỂN ĐỘNG CƠ CHÍNH.. 23
3.2.1 Chương trình chính. 23
3.2.2 Chương trình ngắt 24
Chương 4: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN.. 25
4.1 KẾT QUẢ ĐẠT ĐƯỢC.. 25
4.2 NHỮNG HẠN CHẾ CỦA ĐỀ TÀI. 25
4.3 HƯỚNG PHÁT TRIỂN. 25
TÀI LIỆU THAM KHẢO.. 27
PHỤ LỤC 1. 28
PHỤ LỤC 2. 29
DANH MỤC CÁC BẢNG, SƠ ĐỒ, HÌNH
Bảng 2.1 Bảng trạng thái mạch công suất
Sơ đồ 3.1 Sơ đồ tổng quát mạch điện tử
Sơ đồ 3.2 Chiến thuật thi đấu
Sơ đồ 3.3 Lưu đồ chương trình chính Pic điều khiển cơ cấu
Sơ đồ 3.4 Lưu đồ chương trình ngắt điều khiển Pic cơ cấu
Sơ đồ 3.5 Lưu đồ chương trình chính điều khiển Pic động cơ chính
Sơ đồ 3.6 Lưu đồ chương trình ngắt điều khiển Pic động cơ chính
Hình 1.1 Nhôm V sử dụng làm khung đế robot
Hình 1.2 Khung đế robot
Hình 1.3 Mô hình động cơ chính
Hình 1.4 Bánh xe có rãnh
Hình 1.5 Bánh xe omni
Hình 1.6 Khớp trượt dọc
Hình 1.7 Ổ bi sử dụng trong các khớp trượt
Hình 1.8 Mô hình động cơ kéo khớp trượt dọc
Hình 1.9 Khớp trượt ngang(bên ngoài)
Hình 1.10 Khớp trượt ngang(bên trong)
Hình 1.11 Mối liên kết giữ khớp trượt dọc và khớp truợt ngang
Hình 1.12 Tay gắp
Hình 1.13 Giỏ đựng phôi
Hình 1.14 Mầm được chế tạo
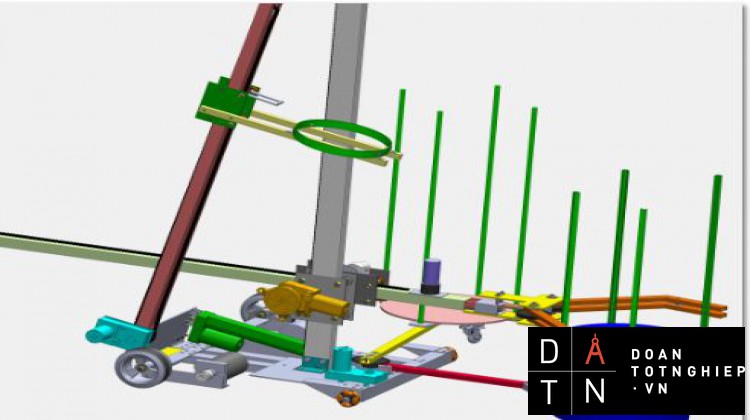
Hình 1.15 Robot được thiết kế
Hình 1.16 Cơ cấu định vị phôi
Hình 2.1 Ảnh thật và sơ đồ chân Pic 16F887
Hình 2.2 Mạch vi điều khiển điều khiển động cơ chính
Hình 2.3 Mạch vi điều khiển điều khiển cơ cấu
Hình 2.4 Nút nhấn mở rộng trên gamepad
Hình 2.5 Mạch nguồn 5V
Hình 2.6 Mạch công suất chính
Hình 2.7 Relay12V
Hình 2.8 Mosfet IRF3205
Hình 2.9 Mạch công suất phụ
Hình 2.10 Mạch cảm biến hành trình
Hình 2.11 Cảm biến hành trình
Hình 3.1 Chiến thuật trên sân thi đấu
Chương 1: THIẾT KẾ VÀ THI CÔNG CƠ KHÍ
1.1 TÍNH TOÁN CHỌN ĐỘNG CƠ CHÍNH
Ta có:
- Tốc độ của động cơ(không có hộp giảm tốc): n = 2000 vòng/ phút.
- Tỉ số truyền của bộ truyền đai: i = 2/15
Suy ra tốc độ di chuyển của robot là: V=1.4 m/s
- Lực tác dụng: P = 20 kg = 200 N tác dụng trên 2 bánh chủ động
Công suất tải:
Nt = = = 0.14 KN = 140 N
(Nt : Công suất tải của động cơ chính)
Vậy công suất cần thiết.
Nct = = = 149 W
Trong đó:
Nct - công suất cần thiết.
η - hiệu suất truyền động.
η = η1.η2 = 0.95x 0.99 = 0.94
η1 = 0.95 – hiệu suất bộ truyền đai
η2 = 0.99 – hiệu suất của một cặp ổ lăn
- Cần phải chọn động cơ có công suất lớn hơn công suất cần thiết:
Nđc Nct = 149 W
1.2 KHUNG ĐẾ
Phần khung đế được thiết kế toàn bộ sử dụng các thanh nhôm V dày 3mm lắp đôi một vuông góc nhau tạo nên kết cấu khung vững chắc chịu lực tốt.
Phần khung robot được lắp động cơ điện DC 24V không có hộp giảm tốc, công suất 150w (phù hợp với yêu cầu), số vòng quay 2000 vòng/phút, momen xoắn cực đại 50 N.m
............................................................................................................................
Chương 4: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN
4.1 KẾT QUẢ ĐẠT ĐƯỢC
Toàn bộ yêu cầu đối với một đồ án tốt nghiệp đã được trình bày cơ bản với đầy đủ nội dung chính. Trong bản thuyết minh này đã giải quyết được những vấn đề sau:
- Thiết kế thi công cơ khí đơn giản, chắc chắn, đảm bảo độ ổn định cho robot.
- Robot đáp ứng đầy đủ yêu cầu tham gia Robocon.
- Ứng dụng được Vi điều khiển PIC16F887 trong điều khiển động cơ DC.
- Phân tích chức năng , nhiệm vụ, mạch nguyên lý,… từ đó đề ra các phương án thiết kế mạch.
- Đề ra giải thuật điều khiển và chương trình điều khiển đầy đủ.
Tuy không giành được giải trong cuộc thi Robocon nhưng với kết quả thi đấu hai trận thua một trận thắng giành được 3 điểm trận xếp hạng thứ 3 của bảng thi đấu cũng an ủi phần nào công sức cả đội đã bỏ ra trong suốt thời gian thiết kế và chế tạo robot.
4.2 NHỮNG HẠN CHẾ CỦA ĐỀ TÀI.
Do thời gian cho phép có hạn, kiến thức còn hạn chế gặp nhiều bỡ ngỡ về thực tế cũng như kiến thức còn chưa vững chắc cùng một số nguyên nhân khách quan và chủ quan khác nên đồ án không thể tránh được những thiếu sót.
- Do chưa nắm vững nguyên lý hoạt động của các linh kiện nên cũng không tránh khỏi việc chỉnh sửa mạch điện, thay linh kiện nhiều lần gây tốn kém.
- Việc gia công cơ khí còn hạn chế do thiếu một số dụng cụ cần thiết, hầu hết các chi tiết phải gia công bằng phương pháp thủ công nên tính thẩm mỹ không cao.
- Cơ cấu bắn không an toàn do có lực va đập lớn.
- Việc điều khiển các cơ cấu chủ yếu nhờ vào cảm tính nên không được chính xác.
- Thời gian gắp lá lâu do mỗi lần chỉ gắp được một lá.
- Robot di chuyền không thẳng do hai động cơ chính quay không cùng tốc độ.
- Mạch điện và robot chưa được hoàn thiện lắm, đôi khi mạch hoạt động không ổn định..
4.3 HƯỚNG PHÁT TRIỂN.
Những vấn đề mới nẩy sinh trong quá trình thực hiện đề tài này, không chỉ là động lực kích thích niềm say mê trong quá trình nghiên cứu mà còn là sự thách thức về khả năng của bản thân chúng em.
Các hướng phát triển:
- Thay một số cơ cấu sử dụng nhôm sang sử dụng inox để tăng độ chắc chắn.
- Lắp thêm encoder để robot chạy thẳng tốt hơn.
- Chế tạo lại tay gắp để một lần có thể gắp nhiều lá hơn.
- Chế tạo lại cơ cấu bắn cho nhỏ gọn và an toàn hơn.
- Lắp thêm một số công tắc hành trình ở các cử hành trình để tránh robot làm việc quá cử hành trình gây ra sự cố.
Lập trình cho robot hoạt động bán tự động để dễ dàng cho việc điều khiểu cũng như tiết kiệm thời gian hoàn thành công việc