THIẾT KẾ CẢI TIẾN ROBOCON QUỐC TẾ 2014 điều khiển TỰ ĐỘNG




NỘI DUNG ĐỒ ÁN
MỤC LỤC THIẾT KẾ CẢI TIẾN ROBOCON QUỐC TẾ 2014 điều khiển TỰ ĐỘNG
Chương 1: TỔNG QUAN & GIỚI THIỆU ĐỀ TÀI. 1
1.1 Tổng quan:. 1
1.1.1 Sân chơi ROBOCON: 1
1.1.2 ROBOCON 2013: 1
1.2 Giới thiệu đề tài:. 3
1.2.1 Giới thiệu: 3
1.2.2 Ý nghĩa: 3
1.2.3 Giới hạn đề tài: 3
1.2.4 Yêu cầu: 3
Chương 2: THIẾT KẾ VÀ THI CÔNG CƠ KHÍ. 4
2.1 Giai đoạn 1. 4
2.1.1 Chọn mua động cơ: 4
2.1.2 Thiết kế và thi công phần khung xe. 5
2.2 Giai đoạn 2:. 9
2.2.1 Thiết kế cơ cấu khớp trượt lên xuống: 9
2.2.2 Thi công: 9
2.3 Giai đoạn 3:. 12
2.2.3 Thiết kế: 12
2.2.4 Thi công: 13
2.3 Giai đoạn 4: Thiết kế và thi công tay gắp mầm:. 15
2.3.1 Thiết kế. 15
2.3.2 Thi công. 16
2.4 Giai đoạn 5:. 17
2.5.1 Thiết kế và thi công chặn-dẫn hướng. 17
2.5.2 Kiểm tra-chỉnh sửa. 17
2.5 Hoàn thiện robot. 18
Chương 3: MẠCH ĐIỆN TỬ... 21
3.1 Mạch điều khiển. 21
3.1.1 Đặc điểm.. 21
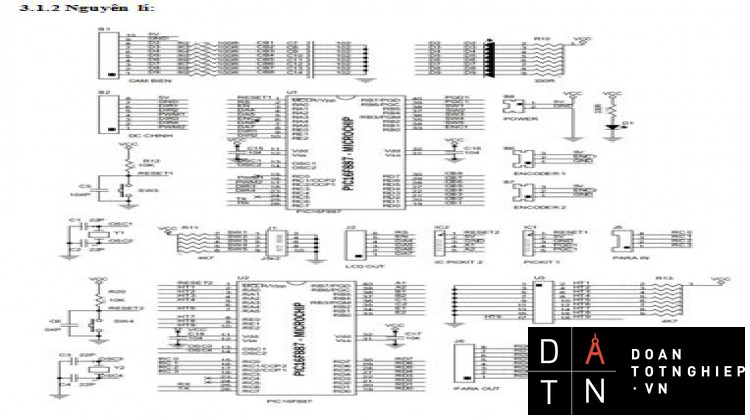
3.1.2 Nguyên lí 22
3.1.3 Giới thiệu PIC16F887. 23
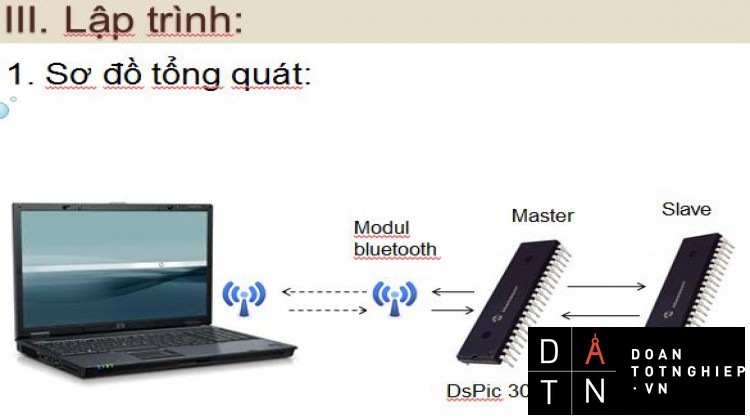
3.2 Mạch giao tiếp Bluetooth:. 23
3.2.1 Đặc điểm: 23
3.2.2 Nguyên lý:. 24
3.2.3 Giới thiệu DsPIC30F4011: 25
3.3 Module bluetooth HC-05 break-out. 26
3.3.1 Giới thiệu công nghệ Bluetooth. 26
3.3.2 Module bluetooth HC-05 break out 26
3.4 Mạch cảm biến dò đường. 28
3.4.1 Bộ thu phát 28
3.4.2 Bộ so sánh: 28
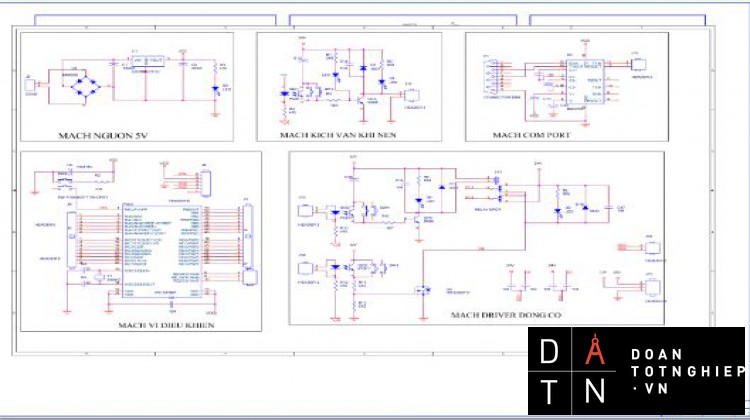
3.5 Mạch nguồn. 30
3.5.1 Đặc điểm.. 30
3.5.2 Nguyên lí 30
3.6 Mạch công suất. 31
3.6.1 Mạch công suất điều khiển cơ cấu. 31
3.6.2 Mạch công suất chính. 32
Chương 4: GIẢI THUẬT VÀ ĐIỀU KHIỂN.. 33
4.1 Tổng quát. 33
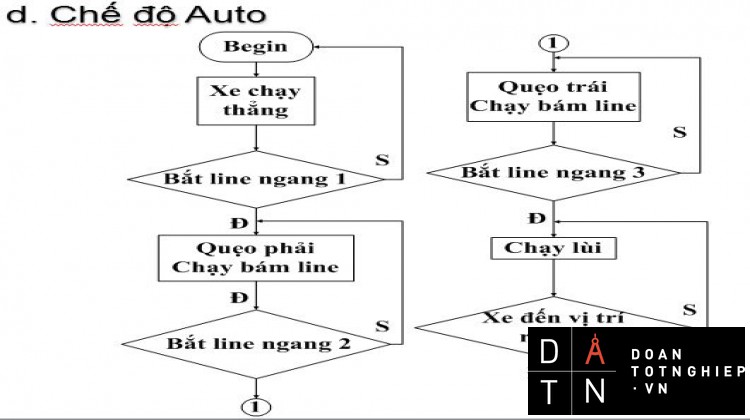
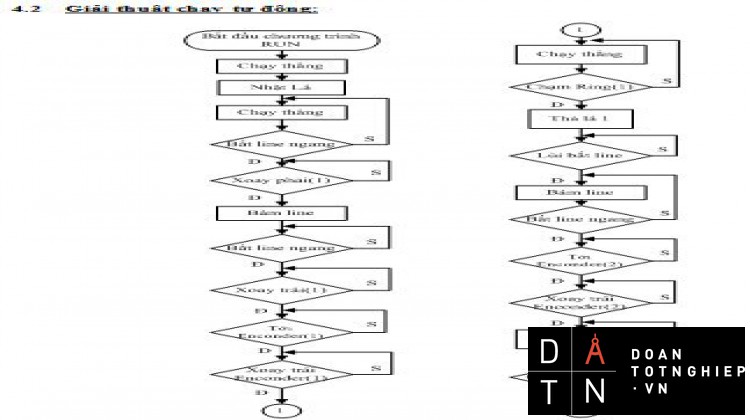
4.2 Giải thuật chạy tự động. 34
4.3 Giải thuật điều khiển bằng tay. 36
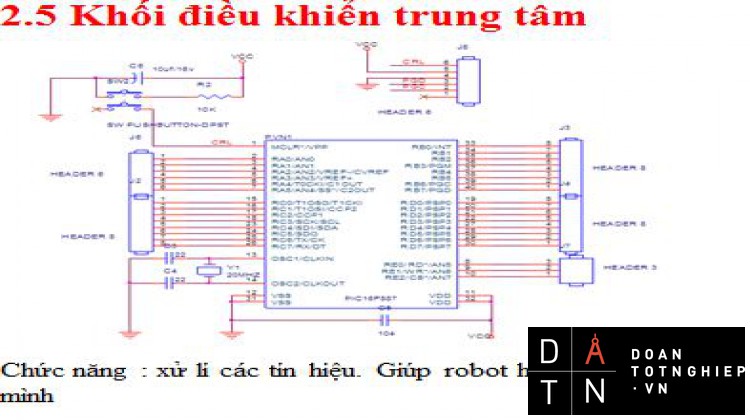
4.3.1 Khối điều khiển. 36
4.3.2 Giải thuật điều khiển bằng tay. 36
4.4 Giải thuật giao diện Visual 37
4.5 Giao diện Visual 38
4.5.1 Giới thiệu Visual Studio Express 2012. 38
4.5.2 Giới thiệu Visual C# Express. 38
4.5.3 Giao diện người dùng trên Window.. 39
4.5.4 Lưu đồ giải thuật Visual C# Express. 47
Chương 5: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN. 50
5.1 Kết quả: 50
5.2 Hạn chế: 50
5.3 Hướng phát triển: 50
DANH MỤC NGUỒN THAM KHẢO.. 51
PHỤ LỤC.. 52
DANH MỤC CÁC BẢNG BIỂU, SƠ ĐỒ
Hình 1.1 Toàn cảnh sân thi đấu Robocon 2013.
Hình 1.2: Khu vực hoạt động của robo tự động.
Hình 2.1 Kết cấu phần khung xe.
Hình 2.2 Động cơ chính.
Hình 2.3 Bánh xe chủ động.
Hình 2.4 Puli truyền động.
Hình 2.5 Đĩa encoder.
Hình 2.6 Bánh xe omni.
Hình 2.7 Cơ cấu trượt- nâng.
Hình 2.8 Cơ cấu nâng với đĩa Encoder.
Hình 2.9 Động cơ và cơ cấu truyền động cơ cấu trượt-nâng.
Hình 2.10 Cơ cấu nâng.
Hình 2.11 Cơ cấu kẹp.
Hình 2.12 Truyền động cơ cấu kẹp.
Hình 2.13 Cơ cấu kẹp sau khi thi công.
Hình 2.14 Tay lấy mầm.
Hình 2.15 Bản lề tay lấy mầm.
Hình 2.16 Chặn-dẫn hướng.
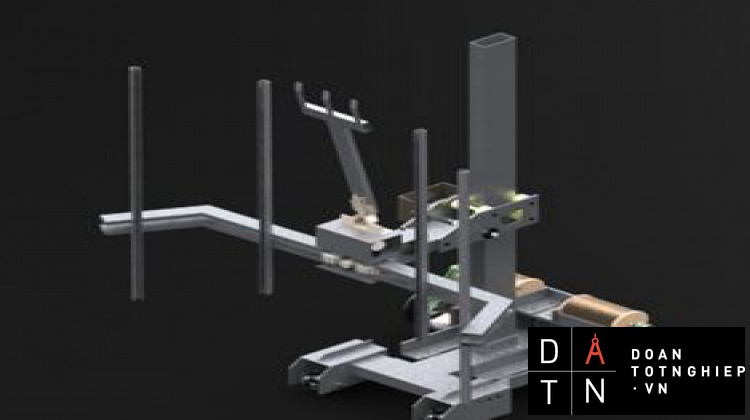
Hình 2.17 Thiết kế hoàn thiện
Hình 2.18 Mô hình thi công hoàn thiện 1.
Hình 2.19 Mô hình thi công hoàn thiện 2.
Hình 3.1 Nguyên lý mạch điều khiển.
Hình 3.2 Nguyên lý mạch giao tiếp Bluetooth.
Hình 3.3 Bố trí các chân chức năng DsPIC30F4011.
Hình 3.4 Module Bluetooth HC-05.
Hình 3.5 Nguyên lý mạch thu phát.
Hình 3.6 Bố trí linh kiện mạch thu phát.
Hình 3.7 Nguyên lý mạch opamp.
Hình 3.8 Nguyên lý mạch nguồn xung LM2576.
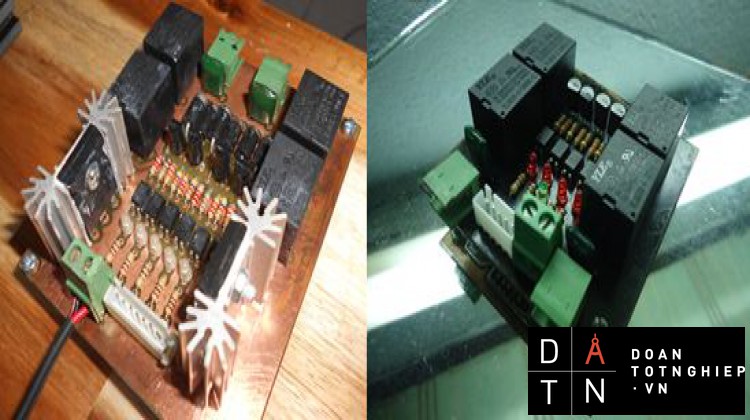
Hình 3.9 Mạch công suất phụ.
Hình 3.10 Nguyên lý mạch công suất phụ.
Hình 3.11 Mạch công suất chính.
Hình 3.12 Nguyên lý mạch công suất chính.
Hình 4.1 Giao diện lựa chọn chế độ Robocon.
Hình 4.2 Giao diện điều khiển tự động.
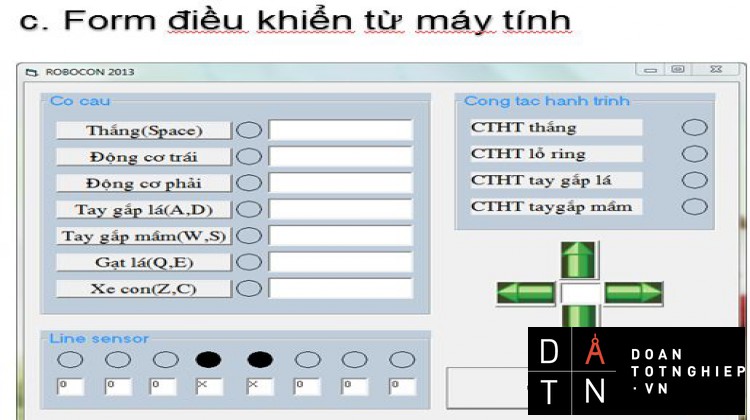
Hình 4.3 Giao diện điều khiển bằng tay.
Hình 4.4 Giao diện thông tin sinh viên thực hiện.
Sơ đồ 3.1 Sơ đồ khối điều khiển.
Sơ đồ 3.2 Sơ đồ khối giao tiếp Bluetooth.
Sơ đồ 3.3 Sơ đồ khối HC-05.
Sơ đồ 4.1 Giải thuật điều khiển tổng quát.
Sơ đồ 4.2 Giải thuật điều khiển tự động (1).
Sơ đồ 4.3 Giải thuật điều khiển tự động (2).
Sơ đồ 4.4 Sơ đồ khối điều khiển bằng tay.
Sơ đồ 4.5 Giải thuật điều khiển bằng tay.
Sơ đồ 4.6 Giải thuật giao diện điều khiển.
Sơ đồ 4.7 Giải thuật Form1.
Sơ đồ 4.8 Giải thuật Form2.
Sơ đồ 4.9 Giải thuật Form3.
Chương 1: TỔNG QUAN & GIỚI THIỆU ĐỀ TÀI
-
Tổng quan:
- Sân chơi ROBOCON:
Robocon là cuộc thi được khởi xướng tại Nhật Bản. Từ năm 2002, nó trở thành cuộc thi thường niên do Hiệp hội Phát thanh và Truyền hình châu Á Thái Bình Dương (Asia-Pacific Broadcasting Union) tổ chức tại các nước có thành viên mang tên ABU Robocon để cổ vũ cho phong trào sáng tạo robot của thanh niên trong khu vực. Thành viên tại mỗi nước được cử một đội là sinh viên của một trường đại học hay cao đẳng tham dự (ngoại trừ nước đăng cai tổ chức được cử hai đội). Trong đa số trường hợp, đội tham dự ABU Robocon được tuyển ra từ vòng thi trong nước do đài truyền hình thành viên tổ chức với cùng chủ đề. Là cuộc thi truyền hình có yếu tố kỹ thuật và tính đối kháng cao, Robocon có được sự quan tâm rất lớn của mọi thành phần trong xã hội.
- ROBOCON 2013:
Với chủ đề và luật thi có nhiều nét mới so với những năm trước, Robocon 2013 hứa hẹn nhiều điều bất ngờ cho sinh viên nói riêng cũng như cộng đồng yêu thích Robocon nói chung.
- Chủ đề : Hành tinh xanh.
- Tóm tắt luật thi :
- Thời gian cho mỗi trận là 3 phút.
- Mỗi đội có 2 Robot:
- 1 Robot tự động (Auto).
- 1 Robot điều khiển bằng tay (Manual).
- Robot bằng tay lấy lá ở kho, đem gắn vào 3 ô trống (Ring) ở bán cầu Nam.
- Tiếp theo Robot bằng tay lấy lá ở kho chuyển cho Robot tự động.
- Robot tự động phải gắn tối thiểu 3 lá ở vùng bán cầu Bắc (2 lá ở phần sân của mình và 2 lá ở phần chung), sau đó Robot tự động mới được phép lấy mầm ở cực Bắc.
- Robot tự động lấy mầm của đội mình ở cực Bắc chuyển cho Robot bằng tay.
- Robot bằng tay đứng dưới đường giới hạn 2 để bắn mầm lên vùng Mặt Trăng. Nếu mầm của đội nào đứng trên vùng Mặt Trăng trước và không bị ngã sau 3 giây bắn lên thì đội đó sẽ chiến thắng tuyệt đối “Green Planet”.
- Với chủ đề và luật thi có nhiều nét mới so với những năm trước, Robocon 2013 hứa hẹn nhiều điều bất ngờ cho sinh viên nói riêng cũng như cộng đồng yêu thích Robocon nói chung.
...............................
-
Giới thiệu đề tài:
- Giới thiệu:
Đề tài: thiết kế chế tạo robo tự động.
Với đề tài này nhóm chúng em thiết kế và chế tạo robo tự động tham gia cuộc thi Robocon 2013. Nhiệm vụ của robot này là nhận lá (phôi) trao bởi robo điều khiển bằng tay. Sau đó đem 3 phôi này đến các vị trí Ring 1, 2 và 3. Tiếp theo, robo tự động sẽ chạy đến khu cực Bắc lấy mầm rồi đem về đường giới hạn 2 trao cho robo bằng tay.
Robo không chỉ hoạt động với chế độ tự động mà còn có khả năng hoạt động qua điều khiển từ xa bằng máy tính thông qua module Bluetooth.
Ngoài việc quan sát robo hoạt động bằng cách quan sát trực tiếp, người dùng còn có thể giám sát hoạt động của nó qua 1 giao diện giám sát trên máy tính.
- Ý nghĩa:
Tham gia cuộc thi Robocon, đó là một cơ hội để chúng em giao lưu, học hỏi và tìm hiểu nhiều hơn về robot tự động, các kĩ năng làm việc nhóm. Sân chơi này rất bổ ích, đem lại niềm đam mê to lớn cho các thế hệ sinh viên.
Và một điều quan trọng hơn hết, robo tự đông còn là đồ án tốt nghiệp của nhóm chúng em để đánh giá kết quả học tập trong thời gian vừa qua.
- Giới hạn đề tài:
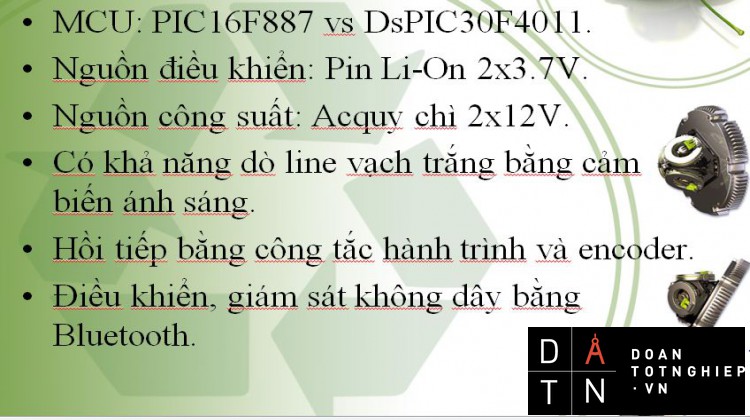
- Động cơ DC encoder.
- Vi điều khiển PIC16F887.
- Vi điều khiển DsPIC30F4011.
- Module Bluetooth HC-05.
- Ngôn ngữ lập trình C cho PIC dùng MikroC Pro For PIC.
- Ngôn ngữ lập trình C cho DsPIC dùng MikroC Pro For DsPIC.
- Ngôn ngữ lập trình C dùng C# tạo giao diện điều khiển qua máy tính.
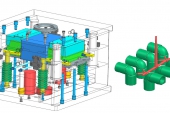
- Thiết kế mạch điện tử dùng Orcad.
- Thiết kế cơ khí dùng Solidworks 2012, ACAD 2010.
- Yêu cầu:
- Lập trình robo hoạt động với chương trình tự động, thả lá (phôi) đúng các vị trí mong muốn.
- Lập trình điều khiển bằng tay thông qua module bluetooth.
- Thiết kế giao diện điều khiển, giám sát hoạt động robo bằng Visual Studio Express 2012.
- Lưu dữ liệu hoạt động khi kết nối với máy tính.
Chương 2: THIẾT KẾ VÀ THI CÔNG CƠ KHÍ
Nói chung để tạo ra một mô hình học tâp hay ứng dụng vào cuộc sống thì phần thiết kế cơ khí là rất quan trọng.Với đề tài THIẾT KẾ-CHẾ TẠO ROBOT TỰ ĐỘNG nhóm chúng em đã tìm hiểu, nghiên cứu thảo luận với nhau và đề ra những phương án thiết kế qua từng giai đoạn, làm sao khi điều khiển robot có thể di chuyển được dễ dàng và các cơ cấu có thể hoạt động đươc linh hoạt . Trong từng giai đoạn thực hiện nhóm chúng em chọn ra nhưng phương án thiết kế tối ưu nhất cho đề tài và bắt tay vào thi công.
- Giai đoạn 1
- Giai đoạn đầu tiên nhóm chúng em chọn mua động cơ và thiết kế phần khung xe.
- Chọn mua động cơ:
Số vòng quay chưa qua hộp giảm tốc n = 5000 vòng/ phút , số vòng quay của động cơ qua hộp giảm tốc n=200 vòng/phút và ta có vận tốc di chuyển robot V=0.8m/s.
Lực tác dụng : P = 15kg=150N
Công suất tải:
Trong đó:
Nt : Công suất tải của động cơ chính.
N : Công suất cần thiết.
η = η1 (η2 )3 = 0.97 0.993 = 0.94
Trong đó : η : Hiệu suất bộ truyền.
η = 0,97 – hiệu suất bộ truyển xích bánh răng.
η = 0,99 – hiệu suất của một cặp ổ lăn.
Công suất cần thiết:
Cần phải chọn động cơ có công suất lớn hơn công suất cần thiết:
Nđc>=Nct=128W
2.1.2 Thiết kế và thi công phần khung xe
- Khung xe là phần giúp robot có thể di chuyển được trên sân đấu mang theo các cơ cấu trên nó.
- Phần khung xe được làm bằng nhôm định hình có gắn thêm 2 động cơ chính. Đế xe được gắn thêm bánh nhôm, bánh tự lựa (hoặc bánh omni). Ngoài ra trên khung xe có gắn thêm trục chính các khớp trượt.
- Phương án thiết kế:
- Ở phương án này khung robot được thiết nhỏ gọn, kết cấu vững chắc có tính thẩm mỹ.
- Ở phần sau của khung robot có gắn động cơ chính (hình 2.2) và bánh xe nhôm (hình 2.3)
................................
Ngoài ra trên trục của bánh xe có thêm 1 encoder 240 xung (hình 2.5) để kiểm soát tốc độ và vòng quay của bánh xe.
........................................
- Ưu và nhược điểm:
- Ưu điểm:
- Khung robot được thiết kế nhỏ gọn
- Dùng bánh omni để dẫn hướng cho robot là giải pháp thật tối ưu vì bánh omni là loại bánh hỗ trợ rất đắc lực trong việc di chuyển của robot, giúp robot di chuyển linh hoạt và ổn định cao mặc dù robot có tải trọng lớn.
- Tính thẩm mỹ cao.
- Chi phí thấp.
- Nhược điểm:
- Lắp ráp khó khăn hơn đòi hỏi bàn tay khéo léo của người chế tạo.
- Thi công phần khung robot:
- Song song với việc thiết kế nhóm đã tìm hiểu, hỏi những người đi trước và đã mua được các nguyên vật liệu cho phần khung xe.
- Động cơ chính: chọn được động cơ khoảng 4200 vòng/phút, công suất lớn hơn 128W.
- Bánh xe nhôm: có đường kính d = 100mm , bánh omni.
- Nhôm: các loại nhôm hộp chữ nhật (50x25mm), tấm, nhôm V...
- Ngoài ra nhóm chuẩn bị một số dụng cụ để thi công như : Cưa sắt, dũa, khoan tay ...
- Sau khi chuẩn bị mọi thứ nhóm đã bắt tay ngay vào thi công phần khung robot và sau một thời gian nhóm đã hoàn thành xong phần khung robot.
Mô hình phần khung robot đã thi công:
- Đặc điểm:
- Phần khung robot thực tế sau khi hoàn thành có hình dáng và kích thước giống với phương án thiết kế ban đầu. Đạt được các yêu cầu đã đề ra như khung robot có khối lượng nhẹ, chi phí thấp.
- Song song với việc thi công phần cơ khí thi mạch điện tử và lập trình cũng tiến hành. Và sau khi làm xong phần khung robot đã mang ra test thưc tế thấy robot chạy khá ổn định có sai sót vài chỗ trong lúc thi công nhưng đã kịp thời sửa chữa.
- Hạn chế:
- Khó khăn trong quá trình lắp ráp.
- Vẫn còn sai số so với bản thiết kế.
.................................
- Giai đoạn 2:
- Trong giai đoạn 2 nhóm chúng em thiết kế và thi công cơ cấu khớp trượt lên xuống.
- Thiết kế cơ cấu khớp trượt lên xuống:
Cơ cấu khớp trượt lên xuống dùng con lăn được sử dụng rộng rãi, phổ biến và hoạt động của cơ cấu cũng rất hiệu quả.
- Thi công:
- Với phương án thiết cơ cấu khớp trượt lên xuống như nhóm đã bắt tay vào thi công.
- Theo thiết kế nhóm đã chuẩn bị :nhôm ống định hình 50x25mm, nhôm miếng 2mm, nhựa đặc có hình trụ…
- Thanh trụ chính sử dụng nhôm ống 50x25mm với chiều dài là 90mm.
- Nhựa đặc hình trụ được tiện có rãnh làm con lăn dùng làm cơ cấu trượt.....................
Mô hình đã thi công :
Đặc điểm:
- Sau khi thi công xong cơ cấu có hình dáng và kích thước giống như thiết kế ban đầu.
- Khớp trượt lên xuống êm, ổn định.
- Lực nâng đủ lớn để di chuyển toàn bộ cụm tay kẹp và 3 phôi.
- Giai đoạn 3:
- Trong giai đoạn này nhóm chúng em thiết kế và gia công cơ cấu tay kẹp: