Thiết kế hệ thống điều khiển duy trì áp suất ứng dụng trong cung cấp nước sạch


NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN Thiết kế hệ thống điều khiển duy trì áp suất, ứng dụng trong cung cấp nước sạch, thuyết minh Thiết kế hệ thống điều khiển duy trì áp suất, ứng dụng trong cung cấp nước sạch, Thiết kế hệ thống điều khiển duy trì áp suất, ứng dụng trong cung cấp nước sạch
LỜI NÓI ĐẦU
Trong sự nghiệp giáo dục của nước ta hiện nay mục tiêu là giáo dục và đào tạo ra những con người có đủ đức đủ tài, có văn hóa, có kỹ năng kỹ xảo nghề nghiệp và có thái độ ứng xử tốt phục vụ tốt cho sự nghiệp công nghiệp hóa hiện đại hóa - xây dựng nước nhà. Để đạt được mục đích đó thì thế hệ trẻ đặc biệt là sinh viên phải luôn chủ động tìm hiểu nghiên cứu và ứng dụng những thành tựu khoa học mới, cùng những nhu cầu, ứng dụng thực tế cấp thiết của nền công nghiệp nước nhà.
Khoa học công nghệ ngày càng phát triển vượt bậc nhất là việc ứng dụng của công nghệ điện tử vi mạch - điện tử công suất có thể tạo ra được những sản phẩm có chức năng xử lý trọn vẹn một quá trình, một khâu, thậm chí cả hệ thống… việc tiếp cận những công nghệ mới cũng như công nghệ của nước ta còn nhiều hạn chế. PLC – BIẾN TẦN hiện nay vẫn đang là những công nghệ hiện đại hàng đầu với tính năng nổi trội là điều khiển chính xác, dải điều chỉnh rộng (tần số 0 – 650 Hz), tiết kiệm được năng lượng đến 40%, độ tin cậy cao… Vậy nên với sinh viên học ngành điện công nghiệp sắp ra trường việc được tiếp cận một công nghệ mới là một may mắn cho em.
Là sinh viên năm cuối được làm đồ án tốt nghiệp là cơ hội cho em tìm hiểu thêm về kiến thức thực tế củng cố những kiến thức đã học, em đã được nghiên cứu về đề tài:
“Thiết kế hệ thống điều khiển duy trì áp suất ứng dụng trong cung cấp nước sạch”.
Đề tài đề cập đến một lĩnh vực đang ứng dụng rất phổ biến trong công nghiệp nhưng lại là kiến thức mới đối với sinh viên. Nhóm thực hiện của chúng em gồm 6 người và được chia ra làm 3 nhóm nhỏ :
- Tìm hiểu và lập trinh PLC s7-200 gồm: Phúc Hòa và Trung Hiệp
- Tìm hiểu về biến tần MM440 của simen: Quang Đăng và Công Luận
- Tìm hiểu về giao thức USS và cảm biến áp suất: Văn Đảng và Văn Ngụ
Nhóm chúng em nghiên cứu, tìm hiểu về giao thức USS và cảm biến áp suất.
DANH MỤC CÁC BẢNG, SƠ ĐỒ, HÌNH
Hình 1.1: Biểu đồ sau minh họa hoạt động của hệ thống.
Hình 2.1: Sơ đồ cấu trúc của PLC
Hình 2.2: Sơ đồ cấu trúc tổng quan của PLC
Hình 2.4: Hình dạng bên ngoài của PLC
Hình 2.5: Cấu tạo CPU224
Hình 3.1: Biến tần MM440 của Siemen
Hình 3.2: Sơ đồ nguyên lý của biến tần
Hình 3.3: Pulse Width Modulation – PWM
Hình 3.4: Màn hình bop
Hình 4.1: Đo áp suất động bằng pitot
Hình 4.2: Đo áp suất động bằng màng
Hình 4.3: Áp kế vi sai kiểu phao
Hình 4.4: Áp kế vi sai kiểu chuông
Hinh 4.5: Phần tử biến dạng kiểu ống hình trụ
Hình 4.6: Cấu tạo của lò xo ống
Hình 4.7: Sơ đồ cấu tạo ống xiphong
Hình 4.8: Sơ đồ màng đo áp suất
Hình 4.9: Sơ đồ cấu tạo màng dẻo có tấm cứng
Hình 4.10 : Bộ chuyển đổi kiểu cảm ứng
Hình 4.11: Sơ đồ cấu tạo nguyên lý của bộ biến đổi kiểu biến áp vi sai
Hình 4.12: Bộ chuyển đổi kiểu điện dung
Hình 4.13: Sơ đồ nguyên lý cảm biến áp trở
Hình 4.14: Cảm biến kiểu áp trở
Hình 4.15: Cảm biến áp suất drucktransmitter p21-400-g17
Hình 4.16: Chíp silic với điện trở R1…R4
Hình 4.17 : Cầu điện trở
Hình 4.18: Sự phụ thuộc của độ nhạy S vào độ dốc của đặc trưng tĩnh
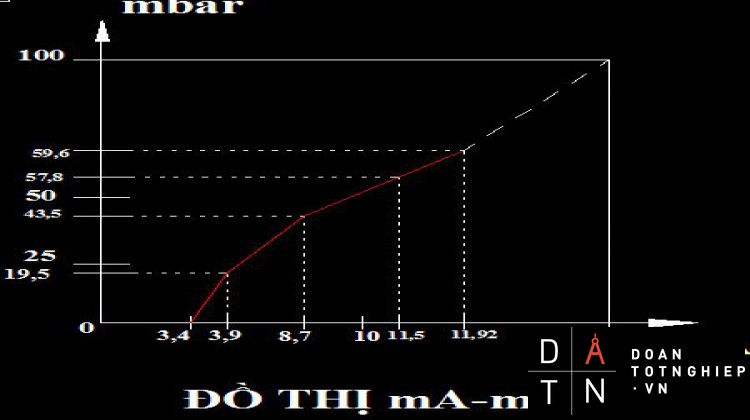
Hinh 4.19 : Đồ thị mbar-mA
Hình 5.1: Mô tả byte SMB30
Hình 5.2 : Các phương án ổn định áp suất
Bảng 2.1: So sánh bộ vi xử lý 1 bít và bộ vi xử lý từ ngữ.
Bảng 4. 1: Phân loại cảm biến theo nguyên lý chuyển đổi giữa đáp ứng và kích thích
Bảng 4.2: Phân loại cảm biến theo dạng kích thích
Bảng 4.3: Phân loại cảm biến theo tính năng của bộ cảm biến
Bảng 4.5: . Các đơn vị đo áp suất và hệ số chuyển đổi giữa chúng
Bảng 4.6: Kết quả đo trên mô hình
Bảng 4.7: Các thông số quan trọng của RS 485
Bảng 5.1: Tốc độ baud và thời gian quét của s7 - 200
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ĐỀ TÀI
1.1 Đặt vấn đề
Hiện nay, như chúng ta biết là nhu cầu sử dụng nước ở mỗi thời điểm là không giống nhau. Làm thế nào để có một hệ thống bơm biết được điều này và tự động điều chỉnh công suất bơm cho phù hợp với lượng tiêu thụ, giữ áp suất không đổi cho hệ thống là yêu cầu đặt ra.
1.2 Giải quyết vấn đề
Qua tìm hiểu thì chúng em thấy các khách sạn , bệnh viện….lớn thì người ta sử dụng hệ thống điều khiển gồm: biến tần, PLC , cảm biến để đáp ứng điều này.
Từ quá trình tìm hiểu, chúng em đã xây dựng mô hình : Hệ Thống Bơm
Mô hình có 2 bơm cấp nước cho bể chứa với công suất 200W/bơm. 1 biến tần MM440 và 1 PLC 224XP của hãng SIMEN .
Biến tần MicroMaster 440 (SIEMENS) được sử dụng cho động cơ 1, công suất tiêu thụ của động cơ sẽ được biến tần điều chỉnh cho phù hợp với nhu cầu phụ tải. Động cơ thứ hai sẽ sử dụng chạy nền nếu sau này phụ tải phát triển lớn lên.
Một sensor áp suất được đưa vào bể chứa để đo áp suất nước đưa về hệ thống điều khiển.
Hệ thống điều khiển là 01 PLC – S7 224XP (SIEMENS), đảm bảo cho việc tự động hoá hoàn toàn quá trình bơm cấp nước .
Vận hành hệ thống thông qua bộ nút nhấn với hai chế độ : bằng tay và tự động. Việc chuyển đổi giữa hai chế độ tự động và bằng tay được thực hiện bằng các công tắc chuyển đổi vị trí.
Hình 1.1: Biểu đồ sau minh họa hoạt động của hệ thống.
Hai bơm sẽ đổi chức năng cho nhau sau 10 phút để đảm bảo rằng không có bơm nào hoạt động quá nhiều còn bơm kia hoạt động quá ít.
Như vậy với việc đưa biến tần vào hệ thống sẽ hoạt động bám sát theo đúng thực tế lưu lượng phụ tải, do vậy sẽ giảm đáng kể năng lượng tiêu hao không cần thiết vào các giờ phụ tải thấp điểm.
CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ PLC S7-200
2.1 Giới thiệu về PLC
Thiết bị điều khiển logic khả trình (Programable Logic Control, viết tắt là PLC) là loại thiết bị cho phép thực hiện linh hoạt các thuật toán điều khiển số thông qua một ngôn nhữ lập trình. Thay cho việc thực hiện thuật toán đó bằng mạch số như vậy với chương trình điều khiển PLC trở thành một bộ điều khiển số nhỏ gọn dễ dàng thay đổi thuật toán và đặc biệt dễ trao đổi thông tin với môi trường xung quanh ( với các PLC khác hay máy tính). Toàn bộ chương trình điều khiển được lưu trong bộ nhớ của PLC và được thiết lập theo chu kỳ vòng quét.
Để có thể thực hiện được một chương trình điều khiển, tất nhiên PLC có tính năng như một máy tính. Nghĩa là phải có một bộ vi xử lý ( PLC), một hệ điều hành, bộ nhớ để lưu chương trình điều khiển, dữ liệu và tất nhiên phải có cổng đầu vào/ra để giao tiếp được với đối tượng điều khiển và trao đổi thông tin với môi trường xung quanh. Bên cạnh đó PLC còn có thêm các khối chức năng đặc biệt khác như bộ đếm (Counter), bộ thời gian ( Timer) và các khối chuyên dụng khác.
2.2 Cấu trúc của PLC
Thiết bị điều khiển Logic lập trình PLC là thiết bị điều khiển đặc biệt dựa trên bộ vi xử lý, sử dụng bộ nhớ lập trình được để lưu trữ các lệnh và thực hiện các chức năng: phép logic, lập chuỗi, định giờ, đếm, thuật toán để điều khiển máy và các quá trình.
Hình 2.1: Sơ đồ cấu trúc của PLC
PLC gồm ba khối chức năng cơ bản:
- Bộ xử lý trung tâm.
- Bộ nhớ.
- Khối vào ra.
Trạng thái ngõ vào của PLC được phát hiện và lưu vào bộ nhớ đệm.PLC thực hiện các lệnh logic trên các trạng thái của chúng và thông qua trạng thái ngõ ra và cập nhật và lưu vào bộ nhớ đệm.Sau đó trạng thái ngõ ra trong bộ nhớ đệm được dùng để đóng mở các tiếp điểm kích hoạt các thiết bị công tắc.Như vậy,sự hoạt động các thiết bị được điều khiển hoàn toàn tự động heo chương trình trong bộ nhớ.Chương trình được nạp vào PLC qua thiết bị lập trình chuyên dụng.
2.3 Bộ xử lý trung tâm
Bộ xử lý trung tâm điều khiển và quản lý hoạt động bên trong PLC.Việc trao đổi thông tin giữa CPU,bộ nhớ và khối vào,ra được thực hiện thông qua hệ thống bus dưới sự điều khiển của CPU.Một mạch dao động thạch anh cung cấp xung clock tần số chuẩn cho CPU, thường là 1 hay 8 MKz,tùy thuộc vào bộ xử lý sử dụng.Tần số xung clock xác định tốc độ hoạt động của PLC và thực sự đồng bộ cho tất các phần tử trong hệ thống.
2.4 Bộ nhớ
Bộ nhớ có nhiệm vụ lưu chương trình điều khiển được lập bởi người dùng và các dữ liệu khác như cờ,thanh ghi tạm,trạng thái đầu vào,lệnh điều khiển đầu ra… Nội dung của bộ nhớ được mã hóa dưới dạng mã nhị phân.
Tất cả PLC S7-200 đều thường dùng các loại bộ nhớ sau: bộ nhớ EEPROM, nó kết hợp 2 ưu điểm của RAM và EPROM,loại này có thể xóa và nạp bằng tín hiệu điện.Tuy nhiên số lần nạp cũng có giới hạn.
2.5 Khối vào ra
Mọi hoạt động xử lý tín hiệu bên trong PLC có mức điện áp 5VDC và 15VDC(điện áp cho TTL và CMOS) trong khi tín hiệu bên ngoài có thể lớn hơn nhiều thường là 24VDC đến 240VDC với dòng lớn.
Khối vào,ra có vai trò mạch giao tiếp giữa vi điện tử của PLC với các mạch công suất bên ngoài kích hoạt các cơ cấu tác động.Nó thực hiện sự chuyển đổi các mức điện áp tín hiệu và cách ly,tuy nhiên khối vào ra cho phép PLC kết nối trực tiếp với các cơ cấu tác động có công suất cỡ nhỏ cỡ 2A trở xuống,không cần các mạch công suất trung gian hay Rơle trung gian
Hình 2.2: Sơ đồ cấu trúc tổng quan của PLC
2.6 Phân loại PLC
Hiện nay trong lĩnh vực điều khiển nói chung và ngành tự động hóa nói riêng,các PLC mới được đưa vào sử dụng ngày càng nhiều.có nhiều hãng sản xuất PLC như : Mitsubishi, Omrom, Siemens, Telemecanique, LS … Trong đó PLC của hãng Siemens gồm các loại như :
- CPU S7 200:
CPU 21x: 210; 212; 214; 215-2DP; 216.
CPU 22x: 221; 222; 224; 224XP; 226; 226XM.
- CPU S7300
- CPU S7400
- Logo
Nhưng trong đề tài này ta chỉ nghiên cứu về PLC S7-200 . Vì PLC S7-200 có tích hợp sẵn thư viện giao tiếp với biến tần,có thể lập trình đồng hồ thời gian thực, và quan trọng là giá rẻ hơn so với các PLC trên.
2.7 Tổng quan về họ PLC S7-200 của hãng Siemens:
2.7.1 Hình dáng bên ngoài:
1. Các đèn trạng thái:
• Đèn RUN-màu xanh: Chỉ định PLC ở chế độ làm việc và thực hiện chương trình
đã được nạp vào bộ nhớ chương trình.
• Đèn STOP-màu vàng: Chỉ định PLC ở chế độ STOP, dừng chương trình đang
thực hiện lại (các đầu ra đều ở chế độ off).
• Đèn SF-màu đỏ, đèn báo hiệu hệ thống bị hỏng có nghĩa là lỗi phần cứng hoặc
hệ điều hành. Ở đây cần phân biệt rõ lỗi hệ thống với lỗi chương trình người dùng,
khi lỗi chương trình người dùng thì CPU không thể nhận biết được vì trước khi
download xuống CPU, phần mềm lập trình đã làm nhiệm vụ kiểm tra trước khi
dịch sang mã máy.
Hình 2.4: Hình dạng bên ngoài của PLC
• Đèn Ix.x-màu xanh: Chỉ định trạng thái On/Off của đầu vào số.
• Đèn Qx.x-màu xanh: Chỉ định trạng thái On/Off của đầu vào số.
• Port truyền thông nối tiếp: RS 485 protocol, 9 chân sử dụng cho việc phối ghép với PC, PG, TD200, TD200C, OP, mạng biến tần, mạng công nghiệp.
Tốc độ truyền - nhận dữ liệu theo kiểu PPI là 9600 baud.
Tốc độ truyền - nhận dữ liệu theo kiểu Freeport là 300 ÷ 38400 baud.
2. Công tắc chọn chế độ:
• Công tắc chọn chế độ RUN: Cho phép PLC thực hiện chương trình, khi chương
trình gặp lỗi hoặc gặp lệnh STOP thì PLC sẽ tự động chuyển sang chế độ STOP
mặc dù công tắc vẫn ở chế độ RUN (nên quan sát đèn trạng thái).
• Công tắc chọn chế độ STOP: Khi chuyển sang chế độ STOP, dừng cưỡng bức
chương trình đang chạy, các tín hiệu ra lúc này đều về off.
• Công tắc chọn chế độ TERM: cho phép người vận hành chọn một trong hai chế
độ RUN/STOP từ xa, ngoài ra ở chế độ này được dùng để download chương trình
người dùng.
3. Vít chỉnh định tương tự: Mỗi CPU có từ 1 đến 2 vít chỉnh định tương tự, có thể xoay được một góc 270°, dùng để thay đổi giá trị của biến sử dụng trong chương trình.
4. Pin và nguồn nuôi bộ nhớ: Sử dụng tụ vạn năng và pin. Khi năng lượng của tụ bị cạn kiệt PLC sẽ tự động chuyển sang sử dụng năng lượng từ pin.
Có hai series: 21x (loại cũ không còn sản xuất nữa) và 22x (loại mới). Về mặt tính
năng thì loại mới có ưu điểm hơn nhiều.Bao gồm các loại CPU sau: 221, 222, 224,
224XP, 226, 226XM trong đó CPU 224XP có hỗ trợ analog I/O onboard và 2 port truyền thông.
2.7.2 Cấu trúc phần cứng của hệ thống PLC S7-200
Thông thường để tăng tính mềm dẻo trong ứng dụng thực tế mà ở đó phần lớn cá đối tượng điều khiển có số tín hiệu đầ vào,ra cũng như chủng loại tín hiệu vào ,ra khác nhau mà các bộ điều khiển PLC được thiết kế không bị cứng hóa về cấu hình.Chúng được chia nhỏ thành các modul.Số các modul sử dụng nhiều hay ít tùy theo yêu cầu công nghệ, song bao giờ cũng phải có một modul chính là modul CPU.chúng được gọi chung là modul mở rộng.Tất cả các modul được gá trên những thanh ray(RACK).
Modul CPU
Là modul có chứa bộ vi xử lý.hệ điều hành,bộ nhớ,các bộ thời gian,bộ đếm,cổng truyền thông(chuẩn truyền RS485) và còn có cổng vào,ra số(digital).Cổng vào ra có trên modul CPU được gọi là cổng vào ra ONBOART.
Trong họ PLC S7-200 có nhiều loại modul CPU khác nhau. Nói chung chúng được đặt tên theo bộ vi xử lý có trong nó như modul CPU212,CPU224,CPU224XP,CPU226… Trong phạm vi đề tài này ta chỉ nghiên cứu sâu về CPU 224.
Hình 2.5: Cấu tạo CPU224
Những modul cùng sử dụng một loại bộ xử lý nhưng khác nhau về cổng vào/ra onboard cũng như các khối hàm đặc biệt được tích hợp sẵn trong thư viện của hệ điều hành phục vụ việc sử dụng các cổng vào/ra.
Ngoài ra còn có modul CPU với 2 cổng truyền thông (CPU224XP,CPU226),trong đó cổng truyền thông thứ 2 có chức năng chính là phục vụ việc nối mạng phân tán.Tất nhiên kèm theo cổng truyền thông thứ 2 là những phần mềm tiện dụng thích hợp cũng đã được cài sẵn trong hệ điều hành.
Trên modul CPU 224XP có 14 đầu vào,10 đầu ra,2 ngõ vào analog và 1 ngõ ra analog.Số modul mở rộng tối đa là 7 do đó tổng số đầu vào tối đa là 128 đầu vào/128 đầu ra.Số đầu vào tương tự là 32 vào/32 ra.
Trong CPU 224XP có tất cả 256 bộ đếm,256 bộ thời gian,một bộ thời gian thực và 1 bộ đếm tốc độ cao,khả năng giao tiếp thông qua RS485(giao tiếp PPI,DP/T,FREEPORT).Chúng có khả năng đặt password để bảo vệ chương trình đã nạp xuống.
2.7.3 Đơn vị xử lý trung tâm (CPU Central Procesing Unit):
Thường trong mỗi PLC có một đơn vị xử lý trung tâm, ngoài ra còn có một số loại lớn có tới hai đơn vị xử lý trung tâm dùng để thực hiện những chức năng điều khiển phức tạp và quan trọng gọi là hot standbuy hay redundant.
Đơn vị xử lý "một -bit": Thích hợp cho những ứng dụng nhỏ, chỉ đơn thuần là logic ON/OFF, thời gian xử lý dài, nhưng kết cấu đơn giản nên giá thành hạ vẫn được thị trường chấp nhận.
b) Đơn vị xử lý "từ - ngữ":
• Xử lý nhanh các thông tin số, văn bản, phép tính, đo lường, đánh giá, kiển tra.
• Cấu trúc phằn cứng phức tạp hơn nhiều.
• Giá thành cao.
* Nguyên lý hoạt động:
- Thông tin lưu trữ trong bộ nhớ chương trình → gọi tuần tự (do đã được điều khiển và kiểm soát bởi bộ đếm chương trình do đơn vị xử lý trung tâm khống chế).
- Bộ xử lý liên kết các tín hiệu (dữ liệu) đơn lẻ (theo một quy định nào đó - do thuật toán điều khiển) → rút ra kết qủa là các lệnh cho đầu ra.
- Sự thao tác tuần tự của chương trình đi qua một chu trình đầy đủ rồi sau đó lại bắt đầu lại từ đầu → thời gian đó gọi là "thời gian quét".
- Đo thời gian mà bộ xử lý xử lý 1 kbyte chương trình để làm chỉ tiêu đánh giá giữa các PLC.
⇒ Như vậy bộ vi xử lý quyết định khả năng và chức năng của PLC.
Bảng 2.1 So sánh bộ vi xử lý 1 bít và bộ vi xử lý từ ngữ.
|
Bộ xử lý một - bit |
Bộ xử lý từ - ngữ |
|
Xử lý trực tiếp các tín hiệu đầu vào (địa chỉ đơn). |
Các tín hiệu vào/ra chỉ có thể được địa chỉ hoá thông qua từ ngữ. |
|
Cung cấp lệnh nhỏ hơn, thông thường chỉ là một quyết địng có/ không. |
Cung cấp tập lệnh lớn hơn, đòi hỏi phải cớ những kiến thức về vi tính. |
|
Ngôn ngữ đầu vào đơn giản, không cần kiến thức tính toán. |
Ngôn ngữ đầu vào phức tạp dùng cho việc cung cấp lệnh lớn. |
|
Khả năng hạn ché trong việc xử lý dữ liệu số (không có chức năng toán học và logic). |
Thu thập và xử lý dữ liệu số. |
|
Chương trình thực hiện liên tiếp, không bị gián đoạn, thời gian của chu trình tương đối dài. |
Các quá trình thời gian tới hạn được địa chỉ hoá qua các lệnh gián đoạn hoặc chuyển đổi điều khiển khẩn cấp. |
|
Chỉ phối được với máy tính đơn giản. |
Phối ghép với máy tính hoặc hệ thống các máy tính. |
|
Khả năng xử lý các tín hiệu tương tự bị hạn chế. |
Xử lý tín hiệu tương tự ở cả đầu vào và đầu ra. |
2.7.4 Bộ nhớ:
Bao gồm cả RAM, ROM, EEPROM.
Một nguồn điện dự phòng là cần thiết cho RAM để duy trì dữ liệu ngay cả khi mất nguồn điện chính.
Bộ nhớ được thiết kế thành dạng modul để cho phép dễ dàng thích nghi với các chức năng điều khiển với các kích cỡ khác nhau. Muốn rộng bộ nhứo chỉ cần cắm thẻ nhớ vào rãnh cắm chờ sẵn trên modul CPU.
2.7.5. Khối vào/ ra:
Hoạt động xử lý tín hiệu bên trong PLC: 5VDC, 15VDC (điện áp cho họ TTL & CMOS).
Trong khi đó tín hiệu điều khiển bên ngoài có thể lớn hơn. khoảng 24VDV đến 240VDC hay 110VAC đến 220VAC vói dòng lớn.
Khối giao tiếp vào ra có vai trò giao tiếp giữa mạch vi điên tử của PLC với mạch công suất bên ngoài.Thực hiện chuyển mức điện áp tín hiệu và cách ly bằng mạch cách ly quang (Opto-isolator) trên các khối vào ra. Cho phép tín hiệu nhỏ đi qua và ghim các tín hiệu có mức cao xuống mức tín hiệu chuẩn. Tác dụng chống nhiễu tốt khi chuyển công tắc bảo vệ quá áp từ nguồn cung cấp điện lên đến điện áp 1500V.
• Ngõ vào: nhận trực tiếp tín hiệu từ cảm biến.
• Ngõ ra: là các transistor, rơle hay triac vật lý.
2.7.6. Rơle:
Rơle là bộ nhớ 1 bít, có tác dụng như rơle phụ trợ vật lý như trong mạch điều khiển dùng rơle truyền thống gọi là các rơ le logic. Theo thuật ngữ máy tính thì rơle còn được gọi là cờ, kí hiệu là M. Có rất nhiều loại rơle chúng ta sẽ khảo sát kỹ hơn đới với loại các PLC của hãng.
2.7.7. Bộ đếm (Counter):
kí hiệu là C.
a) Phân loại: tín hiệu đầu vào.
- Bộ đếm lên.
- Bộ đếm xuống.
- Bộ đếm lên - xuống, bộ đếm này có cờ chuyên dụng chọn chiều đếm.
- Bộ đếm pha phụ thuộc vào sự lệch pha giữa hai tín hiệu xung kích.
- Bộ đếm tốc độ cao (high speed counter), xung kích có tần số cao khoảng vài kZ đến vài chục kZ.
b) Phân loại
- Bộ đếm 16 bit: thường là bộ đếm chuẩn, có giá trị đếm trong khoảng -32768 ÷ 32767.
- Bộ đếm 32 bit: cũng có thể là bộ đếm chuẩn nhưng thường là bộ đếm tốc độ cao.
- Bộ đếm chốt: duy trì nội dug đếm ngay cả khi PLC bị mất điện.
2.7.8. Bộ định thì (times):
kí hiệu là T, được dùng để định các sự kiện có quan tâm đến vấn đề thời gian, bộ địng thì trên PLC được gọi là bộ định thì logic. Việc tỏ chức định thì thực chất là một bộ đếm xung với chu ký có thể thay đổi được. chu kỳ của xung tính bằng đơn vị (ms) gọi là độ phân giải. Tham số của bộ định thì là khoảng thời gian định thì, tham số này có thể là biến hoặc là hằng,nhập vào là số nguyên.
2.8. Ngôn ngữ lập trình trong S7-200
Ngôn ngữ LAD (Ladder Logic): là một ngôn ngữ lập trình bằng đồ họa. Những thành phần cơ bản dùng trong LAD tương ứng với các thành phần của bảng điều khiển bằng Rơle. Với ngôn ngữ này thích hợp với người quen thiết kế mạch điều khiển Logic.
Ngôn ngữ STL( Statemer List) : là một phương pháp thể hiện chương trình dưới dạng tập hợp các câu lệnh.Mỗi câu lệnh trong chương trình,kể cả ngững lệnh hình thức biểu diễn một chức năng của PLC. Với ngôn ngữ này thích hợp với người đã viết các chương trình bằng ngôn ngữ máy tính.
Ngôn ngữ FBD ( Function Block Diagram) : ngôn ngữ này thích hợp cho những người quen sử dụng và thiết kế mạch điều khiển logic. Chương trình này được viết dưới dạng liên kết của các hàm logic kỹ thuật số.
CHƯƠNG 3: GIỚI THIỆU CHUNG VỀ BIẾN TẦN SIMEN
3.1. Tổng quan về Biến tần MM440
Ngày nay, việc tự động hóa trong công nghiệp và việc ổn định tốc độ động cơ đã không còn xa lạ gì với những người đang công tác trong lĩnh vực kỹ thuật. Biến tần là một trong những thiết bị hộ trợ đắc lực nhất trong việc ổn định tốc độ và thay đổi tốc độ động cơ một cách dễ dàng nhất mà hầu hết các xí nghiệp đang sử dụng. Trong phạm vi đề tài chỉ giới thiệu về họ biến tần được sử dụng là MicroMaster 440. MM440 chính là họ biến tần mạnh mẽ nhất trong trong dòng các biến tần tiêu chuẩn. Khả năng điều khiển Vector cho tốc độ và Môment hay khả năng điều khiển vòng kín bằng bộ PID có sẵn đem lại độ chính xác tuyệt vời cho các hệ thống truyền động quan trọng như các hệ thống nâng chuyển, các hệ thống định vị. Không chỉ có vậy, một loạt khối logic sẵn có lập trình tự do cung cấp cho người sử dụng sự linh hoạt tối đa trong việc điều khiển hàng loạt các thao tác một cách tự động. MicroMaster 440 là bộ biến đổi tần số dùng điều khiển tốc độ động cơ 3 pha xoay chiều. Có nhiều loại khác nhau từ 120W nguồn vào 1 pha đến 200kW nguồn vào 3 pha. Các biến tần dùng vi xử lý để điều khiển và dùng công nghệ transistor lưỡng cực cửa cách ly. Điều này làm cho chúng đáng tin cậy và linh hoạt. Một phương pháp điều chế độ rộng xung đặc biệt với tần số xung được chọn cho phép động cơ làm việc êm. Biến tần có nhiều chức năng bảo vệ và bảo vệ động cơ.
Hình 3.1: Biến tần MM440 của Siemen
Biến tần MICROMASTER 440 với các thông số đặt mặc định của nhà sản xuất, có thể phù hợp với một số ứng dụng điều khiển động cơ đơn giản. Biến tần MICROMASTER 440 cũng được dùng cho nhiều các ứng dụng điều khiển động cơ cấp cao nhờ danh sách các thông số hỗn hợp của nó.
Biến tần MICROMASTER 440 có thể dùng trong hai ứng dụng "kết hợp và riêng lẻ" khi tích hợp trong "hệ thống tự động hoá".
3.2. Cấu tạo chung và nguyên tắc hoạt động
MM 440 thay đổi điện áp hay tốc độ cho động cơ xoay chiều bằng cách chuyển đổi dòng điện xoay chiều cung cấp (AC Supply) thành dòng điện một chiều trung gian (DC Link) sử dụng cầu chỉnh lưu. Sau đó điện áp một chiều DC Link lại được nghịch lưu thành điện áp xoay chiều cung cấp cho động cơ với giá trị tần số thay đổi. Nguồn cung cấp cho biến tần có thể sử dụng nguồn xoay chiều một pha (cho công suất thấp), hay sử dụng nguồn xoay chiều ba pha. Phần điện áp một chiều trung gian chính là điện áp trên các tụ điện, các tụ điện đóng vai trò san phẳng điện áp một chiều sau chỉnh lưu và cung cấp cho phần nghịch lưu. Điện áp trên tụ không điều khiển được và phụ thuộc vào điện áp đỉnh của nguồn xoay chiều cung cấp.
Hình 3.2: Sơ đồ nguyên lý của biến tần
Điện áp một chiều được chuyển thành điện áp xoay chiều sử dụng phương pháp điều chế độ rộng xung (Pulse Width Modulation – PWM). Dạng sóng mong muốn được tạo lên bởi sự đóng cắt ở đầu ra của các transistors. MM440 sử dụng các IGBTs (Insulated Gate Bipolar Transistor) ở mạch nghịch lưu, điện áp xoay chiều mong muốn đựơc tạo ra bằng cách thay đổi tần số đóng cắt của các IGBTs. Điện áp xoay chiều ở đầu ra là sự tổng hợp của hàng loạt các xung vuông với các giá trị khác nhau ở đầu ra của các IGBTs, được thể hiện ở hình 3.3.
Hình 3.3: Pulse Width Modulation – PWM
3.3. Các tính chất
Các đặc điểm chính
- Dễ dàng lắp đặt, đặt thông số và vận hành.
- Thời gian tác động lặp đến các tín hiệu điều khiển nhanh.
- Các thông số hỗn hợp cho phép thực hiện được nhiều ứng dụng.
- Đấu nối cáp đơn giản.
- Có các đầu ra rơ le.
- Có các đầu ra tương tự (0 _ 20mA)
- 6 cổng vào số cách ly NPN/PNP
- 2 cổng vào tương tự
- AIN1: 0-10V, 0-20mA và -10 - +10V
- AIN2: 0-10V, 0-20mA
- 2 đầu vào tương tự có thể dùng như cổng vào số 7 và 8
- Thiết kế các môdul với cấu hình cực kỳ linh hoạt.
- Tần số chuyển mạch cao làm giảm độ ồn của động cơ khi làm việc.
- Những chọn lựa ngoài cho truyền thông với PC, panel vận hành cơ bản (BOP), panel điều khiển cấp cao (AOP) và module kết nối mạng Profibus.
Các đặc tính làm việc
- Điều khiển dòng từ thông (FCC) để cải thiện tác động và điều khiển động cơ động.
- Giới hạn dòng điện nhanh (FCL) để làm việc với phần cơ khí dừng tự do.
- Kết hợp hãm dùng dòng điện DC.
- Hãm kết hợp để cải thiện việc hãm động cơ.
- Với chương trình điều khiển thời gian khởi động / dừng động cơ mềm.
- Sử dụng chức năng điều khiển vòng kín PI
Các đặc tính bảo vệ
- Bảo vệ cho cả biến tần và động cơ.
- Bảo vệ quá áp và thấp áp.
- Bảo vệ quá nhiệt biến tần.
- Bảo vệ lỗi nối đất.
- Bảo vệ ngắn mạch.
- Bảo vệ nhiệt động cơ theo phương thức I2t
3.4.Màn hình BOP.
Màn hình BOP hiển thị 5 số. Những Led 7 đoạn sẽ trình bầy những tham số và giá trị của những tham số, những tin nhắn về cảnh báo và lỗi, điểm đặt và giá trị hoạt động. Những thông tin về tham số không được lưu trên màn hình BOP này.
Hình 3.4: màn hình bop
CHƯƠNG 4: CẢM BIẾN ÁP SUẤT
4.1. Giới thiệu chung.
4.1.1. Khái niệm:
Cảm biến là thiết bị dùng để cảm nhận biến đỏi các đại lượng vật lý và các đại lượng không có tính chất điện cần đo thành các đại lượng điện có thể đo và xử lý được.
Các đại lượng cần đo (m) thường không có tính chất điện (nhiêt độ, áp suất…) tác động lên cảm biến cho ta một đặc trưng (s) mang tính chất điện (như điện áp , dòng điện ….) chứa đựng thông tin cho phép xác định giá trị của đại lượng đo. Đặc trưng (s) là hàm của đại lượng cần đo (m) :
S= F(m).
Người ta gọi (s) là đại lượng đầu ra , thông qua đo đạc (s) cho phép nhận biết giá trị của (m).
4.1.2.Phân loại cảm biến.
Các bộ cảm biến được phân loại theo các đặc trưng cơ bản sau đây:
bảng 4.1Theo nguyên lý chuyển đổi giữa đáp ứng và kích thích
|
Hiện tượng |
Chuyển đổi đáp ứng và kích thích |
|
Hiện tượng vật lý |
Nhiệt điện Quang điện Quang từ Điện từ Quang đàn hồi Từ điện Nhiệt từ ….. |
|
Hóa học |
Biến đổi hóa học Biến đổi điện hóa Phân tích phổ…. |
|
Sinh học
|
Biến đổi sinh hóa Biến đổi vật lý Hiệu ứng trên cơ thể sống… |
bảng 4.2 phân loại cảm biến theo dạng kích thích
|
Âm thanh |
Biên pha, phân cực Phổ Tốc độ truyền sóng … |
|
Điện |
Điện tích, dòng điện Điện thế điện áp Điện trường Điện dẫn, hằng số điện môi …
|
|
Từ |
Từ trường Từ thông, cường độ từ trường Độ từ thẩm…. |
|
Quang |
Biên, pha, phân cực, phổ T ốc độ truyền Hệ số phát xạ, khúc xạ Hệ số hấp thụ, hê số bức xạ… |
|
Cơ |
Vị trí Lực, áp suất Gia tốc, vận tốc Ứng suất , độ cứng Mô men Khối lượng, tỷ trọng Vận tốc chất lưu, độ nhớt… |
|
Nhiệt |
Nhiệt độ Thông lượng Nhiệt dung, tỉ nhiệt… |
|
Bức xạ |
Kiểu Năng lượng Cường độ… |
bảng 4.3 phân loại cảm biến theo tính năng của bộ cảm biến
|
Độ nhạy Độ chính xác Độ phân giải Độ chọn lọc Độ tuyến tính Công suất tiêu thụ Dải tần Độ trễ |
Khả năng quá tải Tốc độ đáp ứng Độ ổn định Tuổi thọ Điều kiện môi trường Kích thước, trọng lượng |
Theo phạm vi sử dụng (bảng 4.4)
|
Công nghiệp Nghiên cứu khoa học Môi trường, khí tượng Thông tin, viễn thông Nông nghiệp Dân dụng Giao thông Vũ trụ Quân sự |
Theo thông số của mô hình mạch thay thế:
Cảm biến tích cực có đầu ra là nguồn áp hoặc nguồn dòng.
Cảm biến thụ động dược dặc trưng bởi các thông số R, L, C, M…tuyến tính hoặc phi tuyến.
4.2. Cảm biến đo áp suất chất lưu.
4.2.1.Áp suất và nguyên lý đo áp suất.
4.2.1.1. Áp suất và đơn vị đo.
Áp suất là đại lượng có giá trị bằng tỷ số giữa lực tác dụng vuông góc lên một mặt với diện tích của nó:
Đối với các chất lỏng, khí hoặc hơi thì áp suất là một thông số quan trọng xác định trạng thái nhiệt động học của chúng. Trong công nghiệp thì việc đo áp suất chất lưu có ý nghĩa rất lớn trong việc đảm bảo an toàn cho thiết bị cũng như giúp cho việc kiểm tra và điều khiển hoạt động của máy móc thiết bị có sử dụng chất lưu.
Trong hệ đơn vị quốc tế (SI) dơn vị áp suất là Pascal (Pa) : 1Pa là áp suất tạo bởi một lực có độ lớn 1N phân bố đồng đều trên một diện tích 1m2 theo hướng pháp tuyến.
Đơn vị Pa tương đối nhỏ nên trong công nghiệp người ta còn dùng đơn vị áp suất là Bar (1bar = 105 Pa), ngoài ra người ta còn dùng một số đơn vị khác.
Bảng 4.5 .Các đơn vị đo áp suất và hệ số chuyển đổi giữa chúng
|
Đơn vị áp suất |
Pascal (Pa) |
Bar
|
Kg/cm2 |
Atmotsphe (atm) |
mmH2O |
mmHg |
Mbar |
|
1Pa |
1 |
10-5 |
1,02.10-5 |
0,987.10-5 |
1,02.10-1 |
0,75.10-2 |
10-2 |
|
1bar |
105 |
1 |
1,02 |
0,987 |
1,02.104 |
750 |
103 |
|
1 kg/cm2 |
9,8.104 |
0,98 |
1 |
0,986 |
104 |
735 |
9,8.102 |
|
1atm |
1,013.105 |
1,013 |
1,033 |
1 |
1,033.104 |
760 |
1,013.103 |
|
1mmH2O |
9,8 |
9,8.105 |
10-3 |
0,968.10-4 |
1 |
0,735 |
0,098 |
|
1mmHg |
133,3 |
13,33.10-4 |
1,36.10-3 |
1,315.10-3 |
136 |
1 |
1,33 |
|
Mbar |
100 |
10-3 |
1,02.10-3 |
0,987.10-3 |
1,02 |
0,75 |
1 |
4.2.1.2. Nguyên lý đo áp suất.
Đối với chất lưu không chuyển động , áp suất chất lưu là áp suất tĩnh (pt):
p = pt
Do vậy đo áp suất chất lưu thực chất là xác định lực tác dụng lên một diện tích thành bình. Đối với chất lưu không chuyển động chứa trong một ống hở đặt thẳng đứng, áp suất tĩnh tại một điểm M cách bề mặt tự do khoảng h xác định theo công thức sau:
P = p0 + ρgh
Trong đó :
p0 là áp suất khí quyển.
ρ là khối lượng riêng chất lưu
g là gia tốc trọng trường.
Để đo áp suất tĩnh có thể tiến hành bằng các phương pháp sau:
- Đo áp suất chât lưu lấy qua một lỗ được khoan trên thành bình nhờ cảm biến thích hợp.
- Đo trực tiếp biến dạng của thành bình do áp suất gây nên.
Trong cách thứ nhất phải sử dụng một cảm biến đặt sát thành bình. Trong trường hợp này, áp suất cần đo được cân bằng với áp suất thủy tinh do cột chất lỏng mẫu tạo nên hoặc tác động lên một vật trung gian có phần tử nhạy cảm với lực đo áp suất gây ra. Khi sử dụng vật trung gian để đo áp suất , cảm biến thường trang bị thêm bộ đổi điện. Để sai số đo nhỏ, thể tích chết của kênh dẫn và cảm biến phải không đáng kể so với thể tích tổng cộng của chất lưu cần đo áp suất.
Trong cách đo thứ hai, người ta gắn lên thành bình các cảm biến đo ứng suất để đo biến dạng của thành bình. Biến dạng này là hàm của áp suất.
Đối với chất lưu chuyển động, áp suất chất lưu (p) là tổng áp suất tĩnh (pt) và áp suất động (pđ) :
P = pt +pđ
Áp suất tĩnh tương ứng với áp suất gây nên khi chất lỏng không chuyển động, được đo bằng một trong các phương pháp trình bày ở trên. Áp suất động do chuyển động gây nên và có giá trị tỷ lệ với bình phương vận tốc chất lưu :
Trong đó : ρ là khối lượng riêng chất lưu.
Khi dòng chảy va đập vuông góc với một mặt phẳng, áp suất động chuyển thành áp suất tĩnh, áp suất tác động lên là áp suất tổng. Do vậy, áp suất động được đo thông qua độ chênh lệch giữa áp suất tổng và áp suất tĩnh. Thông thường việc đo hiệu (p - pt) thực hiện nhờ hai cảm biến nối với hai đầu ra của một ống pistot, trong đó cảm biến (1) đo áp suất tổng còn cảm biến (2) đo áp suất tĩnh.
Hình 4.1: Đo áp suất động bằng pitot
Có thể đo áp suất động bằng cách đặt áp suất tổng lên mặt trước và áp suất tĩnh lên mặt sau của một màng đo (hình 4.1) ,như vậy tìn tiệu do cảm biến cung cấp chính là chênh lệch giữa áp suất tổng và áp suất tĩnh
Hình 4.2: Đo áp suất động bằng màng
- Màng đo,2)Phần tử áp điện
4.2.2 Áp kế vi sai dựa trên nguyên tắc cân bằng thủy tĩnh
Nguyên lý chung của phương pháp trên dựa trên nguyên tắc cân bằng áp suất chất lưu với áp suất thủy tĩnh của chất lỏng làm việc trong áp kế.
4.2.2.1 Áp kế vi sai trong kiểu phao.
Áp kế vi sai kiểu phao gồm hai bình thông nhau, bình lớn có tiết diện F và bình nhỏ có tiết diện f (hinh 4.3).Chất lỏng làm việc là thủy ngân hay dầu biến áp.Khi đo ,áp suất lớn (p1) được đưa vào bình lớn, áp suất nhỏ (p2) được đưa vào bình nhỏ. Để tránh chất lỏng làm việc phun ra ngoài khi co áp suất tác động về một phía người ta mở van (4) và khi áp suất hai bên cân bằng thì van (4) được khóa lại.
Khi đạt sự cân bằng áp suất ta có:
p1-p2 = g(ρn –ρ)(h1 +h2)
Trong đó :
g : Gia tốc trọng trường
ρn : trọng lượng riêng của chất lỏng làm việc
ρ : Trọng lượng riêng của chất lỏng hoặc khí cần đo.
Mặt khác từ cân bằng thể tích ta có
F.h1 =f.h2
Suy ra:
Hình 4.3: Áp kế vi sai kiểu phao
Khi mức chất lỏng trong bình lớn thay đổi (h1 thay đổi), phao của áp kế dịch chuyển và qua cơ cấu liên kết làm quay kim chỉ thị trên đồng hồ đo.
Áp kế vi sai kiểu phao dùng để đo áp suất tĩnh không lớn hơn 25 Mpa .Khi thay đổi tỉ số F/f (bằng cách thay ống nhỏ ) ta có thể thay đổi được phạm vi đo .
Cấp chính xác của áp suất kế loại này cao (1 ; 1,5) nhưng chứa chất lỏng độc hại mà khi áp suất thay đổi đột ngột có thể ảnh hưởng tới đối tượng đo và môi trường.
4.2.2.2. Áp kế vi sai kiểu chuông
Cấu tạo của áp kế kiểu chuông gồm chuông (1) nhúng trong chất lỏng làm việc chứa trong bình (2)
- b)
Hình 4.4: Áp kế vi sai kiểu chuông
1)Chuông ;(2 )Bình chứa;(3) Chỉ thị
Khi áp suất trong binh (A) và bình (B) bằng nhau thì nắp chuông (1) ở vị trí cân bằng hình 4.4 a khi có biến thiên độ chênh áp d(p1 –p2 )>0 thì chuông được nâng lên hinh 4.4 b Khi đạt cân bằng ta có:
d(p1 –p2 )F = (dH + dy)∆f.g(ρn –ρ)
với :
dh = dx + dy
d(p1 –p2 ) = dh (ρn –ρ)g
fdy = ∆f.dH + (Φ - F)dx
Trong đó :
F: tiết diện ngoài của chuông.
dH : độ di chuyển của chuông.
dy : độ di chuyển của mức chất lỏng trong chuông.
dx : độ di chuyển của mức chất lỏng ngoài chuông.
∆f : diện tích tiết diện thành chuông.
Φ : diện tích tiết diện trong của bình lớn.
dh : chênh lệnh mức chất lỏng ở ngoài và trong chuông.
f : diện tích tiết diện trong của chuông.
Giải phương trình trên ta có:
....................................................
5.1.5.4. Sử dụng các lệnh USS Protocol
Thư viện lệnh STEP7 – Micro/Win cho phép điều khiển các bộ biến tần MicroMaster một cách dễ dàng bằng các hàm lệnh đặc biết được thiết kế sử dụng giao thức USS để giao tiếp với biến tần. Với lệnh USS, ta có thể điều khiển biến tần và có thể đọc/ghi các thông số của biến tần.
Các lệnh USS này nằm trong thư viện của thư mục Libraries của cây lệnh STEP7 – Micro/Win.
* Lệnh USS_INIT
Lệnh này dùng để bắt thiết lập giao thức USS để kết nối PLC và (mạng) biến tần.
Lệnh USS_INIT được dùng để cho phép và thiết lập hay không cho phép thiết lập giao tiếp với biến tần MicroMaster. Lệnh USS sẽ được thực hiện khi không có lỗi nào xuất hiện. Lệnh này hoàn thành thì bit DONE được set lập tức trước khi tiếp tục thực hiện các lệnh kế tiếp.
Lệnh này được thực hiện mỗi khi đầu vào EN được thiết lập bằng 1. Lệnh USS_INIT được thực hiện mỗi khi có sự thay đổi trạng thái giao tiếp. Khi giao thức USS đã được thiết lập, giao thức USS sẽ được loại bỏ bằng cách thực thi một lệnh USS_INIT mới trước khi có sự thay đổi trong các thông số giao tiếp.
Giá trị của đầu vào USS cho phép chọn giao thức giao tiếp. Giá trị 1 cho phép dùng port 0 cho giao thức USS. Giá trị 0 gán port 0 cho giao thức ppi và loại bỏ giao thức USS.
Đầu vào BAUD thiết lập tốc độ baud: 1200, 2400, 4800, 9600, 19200 hay 3400 baud.
Đầu vào ACTIVE chỉ ra biến tần nào đang được tích cực. Đối với MicroMaster thì hỗ trợ địa chỉ từ 0 đến 30.
Khi lệnh USS_INIT được hoàn tất, bit DONE được thiết lập bằng 1, đầu ra ERR (byte) chứa kết quả của việc thực hiện lệnh.
|
* Lệnh USS_CTRL. Lệnh này dùng để điều khiển biến tần chạy, dừng, đảo chiều và thay đổi tốc độ. Lệnh USS_CTRL được dùng để điều khiển một biến tần MicroMaster được tích cực. Lệnh USS_CTRL đặt các lệnh chọn trước trong bộ đệm giao tiếp. Các lệnh đặt trong bộ đệm được gửi cho biên tần đó đã được chọn trong thông số ACTIVE của lệnh USS_INIT. Mỗi biến tần chỉ có một lệnh DRV_CTRL.
|
|
Đầu vào EN được thiết lập bằng 1 để cho lệnh drv_crtl được thiết lập (lệnh này phải luôn luôn được thiết lập).
Ngõ vào RUN (RUN/STOP) được thiết lập bằng 1cho phép điều khiển biến tần và bằng 0 không cho phép điều khiển biến tần. Khi Run được thiết lập bằng 1, bộ biến tần MicroMaster nhận được lệnh bắt đầu chạy tại tốc độ và chiều đã định trước. Để biến tần chạy thì:
- DRIVER phải được tích cực trong ACTIVE trong USS _ INIT.
- OFF2 và OFF3 phải được đặt bằng 0.
- FAUL và INHIBIT phải bằng 0.
Khi RUN bằng 0 thì một lệnh được gửi đến MicroMaster để giảm tốc độ xuống cho đến khi động cơ dừng hẳn.
Bit OFF2 được dùng để cho phép biến tần dừng động cơ nhanh hơn. Bit OFF3 được dùng để MicroMaster dừng nhanh chóng.
Bit F_ACK (Fault Acknowledge) được dùng để xác nhận lỗi truyền thông trong biến tần. Biến tần sẽ xóa lỗi (FAULT) khi F_ACK đi từ mức thấp đến mức cao.
Bit DIR (direction) đảo chiều quay của động cơ.
Đầu vào DRIVE (drive address) cho biết địa chỉ của biến tần MicroMaster mà lệnh DRV_CRTL đã điều khiển. Địa chỉ có giá trị từ 0 đến 30.
Đầu vào TYPE chọn loại biến tần. Với biến tần MicroMaster 3 chọn TYPE = 0, với biến tần MICROMASTER 4 chọn TYPE = 1.
Đầu vào Speed_SP (speed setpoint) đặt tốc độ của động cơ dưới dạng phần trăm của tốc độ tối đa (-200% đến 200%). Giá trị âm của Speed_SP làm động cơ đảo chiều quay.
Bit Error là một byte lưu kết quả của lần giao tiếp mới nhất với biến tần.
Đầu ra STATUS chứa trạng thái của biến tần.
Đầu ra SPEED lưu tốc độ của động cơ dưới dạng phần trăm của tốc độ định mức (-200% đến 200%).
Đầu ra RUN_EN (DRIVE RUN ENable) cho biết biến tần đang chạy (bằng 1) hay đã dừng (bằng 0).
Đầu ra D_DIR cho biết chiều quay của động cơ.
Đầu ra INHIBIT cho biết trạng thái cấm trong biến tần (0 – not inhibited, bằng 1 inhibited). Để xóa bit cấm thì bit FAULT phải được OFF và các bit vào RUN,OFF2 và OFF3 phải bằng 0.
Đầu ra FAULT cho biết trạng thái của bit lỗi (0 – không có lỗi, 1 – có lỗi). Bộ biến tần sẽ hiển thị mã lỗi. Để xóa bit FAULT thì phải sửa lỗi và thiết lập bằng 1 bit F_ACK.
*lệnh USS_RPM_x
Lệnh này dùng để đọc một thông số từ biến tần về PLC.
Lệnh USS_PRM_x đọc một thông số kiểu word không dấu. Lệnh USS_RPM_x hoàn tất khi MicroMaster xác nhận hay khi có lỗi báo về.
Đầu vào EN phải được thiết lập bằng 1 cho phép truyền yêu cầu xuống MicroMaster và phải luôn được thiết lập bằng 1 cho đến khi bit DONE bằng 1 báo hiệu sự hoàn tất. Một yêu cầu USS_RPM_x được truyền tới MicroMaster ở mỗi chu kì vòng quét khi đầu vào EN được thiết lập bằng 1. Vì thế đầu vào XMT_REQ nên được cho qua một bộ P (bộ tách sườn dương) chỉ cho phép một yêu cầu được truyền đi ở mỗi cạnh lên của đầu vào EN.
Đầu vào DRIVE là địa chỉ của biến tần MicroMaster mà lệnh USS_RPM_x được gửi đi. Địa chỉ này có giá trị từ 0 đến 31.
Đầu vào PARAM xác định thông số cần đọc. Đầu vào INDEX là giá trị chỉ số của thông số cần đọc.
Địa chỉ của một bộ đệm 16 – byte phải được đưa vào đầu vào DB_PTR. Bộ đệm này được sử dụng bởi lệnh READ_PM để lưu kết quả nhận được từ biến tần.
Khi lệnh READ_PM hoàn tất thi đầu ra DONE được thiết lập bằng 1 và đầu ra ERROR (kích thước byte) chứa kết quả của việc thực hiện lệnh.
Đầu ra VALUE là giá trị thông số đọc về.
*Lệnh USS_WPM_x
Lệnh này dùng để ghi một thông số từ PLC xuống biến tần.
Lệnh USS_WPM_x ghi một giá trị word không dấu vào một thông số xác định. Lệnh USS_WPM_x hoàn tất khi MicroMaster xác nhận hay khi nhận được lỗi.
Đầu vào EN phải được thiết lập bằng 1 để cho phép truyền một yêu cầu và luôn giữ nguyên trạng thái bằng 1 cho đến khi bit DONE được thiết lập báo hiệu sự hoàn tất. Một yêu cầu USS_WPM_x được truyền đến MicroMaster ở mỗi chu kỳ quét khi đầu vào XMT_REQ bằng 1. Vì thế XMT_REQ nên được cho qua bộ P (bộ tách sườn dương) chỉ cho phép một lệnh được truyền đi ở mỗi cạnh lên của đầu vào EN.
Đầu vào DRIVE là địa chỉ của biến tần MicroMaster mà lệnh USS_WPM_x được gửi đi. Địa chỉ có giá trị từ 0 đến 31.
Đầu vào PARAM xác định thông số cần ghi. Đầu vào INDEX là giá trị chỉ số của thông số cần ghi. Đầu ra VALUE là giá trị cần ghi thông số.
Khi đầu vào EEPROM được thiết lập bằng 1 thì lệnh này được ghi vào cả RAM và EEPROM của biến tần. Khi đầu vào này bị mất đi thì lệnh chỉ được khi vào RAM của biến tần.
Địa chỉ của một bộ đệm 16 – byte phải được đưa vào đầu vào DB_PTR. Bộ đệm này được sử dụng bởi lệnh USS_WPM_x để lưu kết quả nhận được từ biến tần MicroMaster.
Khi lệnh USS_WPM_x hoàn tất thì đầu ra DONE được thiết lập bằng 1 và đầu ra ERROR (byte) chứa kết quả của việc thực hiện lệnh.
*Kết luận: Do ta không có card truyền thông nên với ba phương pháp đầu nếu dùng thì ta phải xây dựng giao thức cho chúng do đó phải hiểu được cấu trúc truyền nhận giữa PLC và biến tần. Vì trong biến tần chỉ có 2 cổng giao tiếp RS 485 và RS 232 mà trong PLC chỉ tích hợp cổng truyền thông RS 485 như thế đòi hỏi phải có thêm thiết bị chuyển đổi, chương trình lập trình hết sức phức tạp và khó khăn. Nhưng với giao thức USS cho phép ta truyền thông qua cổng RS 485, truyền trực tiếp tham số điều khiển xuống biến tần và nhận trực tiếp tham số mong muốn từ biến tần về mà chỉ cần các khối lệnh có sẵn trong thư viện USS. Do đó sẽ dễ dàng cho quá trình điều khiển về sau. Vì những lý do trên ta lựa chọn cách thức giao tiếp với biến tần bằng USS Toolbox.
Trước khi thực hiện kết nối PLC với biến tần thì phải chắc chắc rằng PLC và biến tần đã được nối với nhau và các tham số được thiết lập ở biến tần.
5.2. Vòng điều khiển tín hiệu ổn định áp suất
Phương án 1:
Phương án 2:
Hình 5.2 Các phương án ổn định áp suất
Với hai phương án điều khiển như trên ta thấy rằng:
Với phương án thứ 1 thì đòi hỏi PLC phải có modul tương tự dẫn đến giá thành cao hơn, mặt khác khi tín hiệu cảm biến đưa về PLC thì biến tần hầu như mất tác dụng. Vì như thế biến tần chỉ mang danh nghĩa cung cấp dòng 3 pha cho động cơ và cho phép động cơ khởi động một cách trơn hơn. Nếu dùng phương án này thì ta chỉ cần sử dụng PLC là đủ.
Với phương án thứ 2 tín hiệu cảm biến đưa về biến tần, tại biến tần thông qua bộ PID xử lý tín hiệu cảm biến để tự động ổn định hệ thống trong giải cho phép. PLC đóng vai trò đóng cắt rơle điều khiển động cơ giao tiếp với biến tần hỗ trợ cho biến tần khi biến tần quá khả năng điều chỉnh. Với phương án này các thiết bị điều khiển đều thực hiện được hầu hết vai trò của mình. Hơn thế còn giảm giá thành do không phải sử dụng modul tương tự.
5.3 Một số ví dụ về lệnh USS
5.3.1 Khởi động USS.
Nhấn start ( I0.0) thì khởi động USS:
5.3.2 Điều khiển động cơ với USS _ CTRL
Nhấn Start bt (I0.2) động cơ chạy với biến tần , nhấn Dừng 1 (I0.3 )thì động cở dừng với biến tần mức độ 1, nhấn Dừng 2 (I0.4) động cơ dừng với tốc độ nhanh hơn nút Dừng 2, nhấn nút Xóa lỗi (I0.5) để xóa lỗi cho biến tần, nhấn nút Đảo chiều (I0.6) để dảo chiều quay động cơ.
CHƯƠNG 6: KẾT LUẬN
Sau một thời gian nghiên cứu và làm việc một cách nghiêm túc cùng vơi sự giúp đỡ, chỉ bảo, đóng góp ý kiến của thầy Đoàn Minh Hải và các thầy cô giáo trong Khoa Điện_Điện Lạnh cùng các bạn trong lớp, đến nay em đã hoàn thành đề tài. Với đề tài điều khiển duy trì áp suất có nhiều phương pháp để thực hiện, nhưng trong phạm vi đề tài này em sử dụng biến tần, PLC và cảm biến áp suất để điều khiển duy trì áp suất. Trong quá trình thực hiện đề tài em đã vận dụng được những kiến thức đã học, tự mình đánh giá được trình độ bản thân, nghiên cứu và học hỏi tìm ra phương án giải quyết, tiếp cận với những thiết bị thực tế. Sau một thời gian thực hiện đề tài chúng em đã đạt được những kết quả sau: thiết kế chế tạo mô hình, lắp ráp hoàn chỉnh mô hình, vận hành và kiểm tra theo đúng quy trình công nghệ, mô hình đảm bảo đáp ứng các yêu cầu đặt ra.
Tuy nhiên do thời gian có hạn và trình độ còn hạn chế do đó phần lập trình điều khiển PLC S7-200 của em vẫn chưa được tối ưu nhất. Thông qua quá trình thực hiện đề tài em dần làm quen với cách làm việc độc lập cũng như phối hợp làm việc theo nhóm và dần biết cách tổ chức công việc và sắp xếp thời gian hợp lý.
Với sự phát triển của quá trình đô thị hoá ngày nay, ở các đô thị mức độ tập trung dân cư lớn. Giải pháp đưa ra để giải quyết vấn đề nhà cao tầng là một trong những phương án hiệu quả nhất. Như thế có một vấn đề được đặt ra là làm sao có thể cung cấp nước cho các khu dân cư nói chung và các khu nhà cao tầng nói riêng mà vẫn đảm bảo áp suất trên đường ống trong giới hạn cho phép. Do vậy chế tạo và thiết kế các hệ thống điều khiển duy trì áp suất ứng dụng trong cung cấp nước sạch là một vấn đề cấp thiết trong công cuộc đô thị hoá ngày nay. Sau một thời gian nghiên cứu tìm hiểu em đã tiến hành thiết kế chế tạo thành công hệ thống duy trì áp suất ứng dụng trong cung cấp nước. Trong phạm vi đề tài này, em sử dụng các thiết bị điều khiển là biến tần MicroMaster 440 và PLC S7 – 200 của hãng Siemens. Sở dĩ em lựa chọn các thiết bị này là vì em mong muốn được nghiên cứu tìm hiểu và ứng dụng những kiến thức được học vào trong đề tài như: cách thức truyền thông giữa các thiết bị (trong đề tài này là cách thức truyền thông giữa biến tần với PLC), các ứng dụng của biến tần vào trong điều khiển động cơ, khẳ năng tự duy trì áp suất của biến tần. Những vấn đề đó hoàn toàn là những kiến thức mới mà chỉ có ngoài thực tiễn sinh viên chúng em mới được tiếp cận. Trong quá trình thực hiện đề tài em gặp rất nhiều khó khăn trong việc tìm nguồn tài liệu (vì nguồn tài liệu chủ yếu là tiếng anh nên rất hạn chế với sinh viên kỹ thuật), nguồn vật tư để chế tạo mô hình, và một điều quan trọng là chúng em thiếu kinh nghiệm thực tế. Với kiến thực hạn chế kinh nghiệm non kém và thời gian có hạn nên em chưa hoàn thiện được đề tài một cách hoàn thiện nhất như chưa tận dụng hết được khẳ năng của biến tần và PLC (chưa dùng phần tử nhiệt để bảo vệ động cơ, chưa dùng thời gian thực để điều khiển hệ thống), chưa thiết kế được phần giám sát điều khiển hệ thống thông qua PC.
Đề tài em thực hiện ở đây chỉ mang tính nghiên cứu, vận dụng các kiến thức đã học để thực hiện nên còn thiếu tính thực tế. Bởi vì với phạm vi chỉ điều khiển động cơ duy trì áp suất ta chỉ cần sử dụng biến tần là đủ. Vì trong biến tần MicroMaster 430 của hãng Siemens có tích hợp khả năng đóng cắt động cơ theo thời gian, có khă năng tự điều chỉnh. Do vậy giá thành sẽ giảm đi mà vẫn đảm bảo đáp ứng được yêu cầu công nghệ.
Sau một thời gian thực hiện đề tài em nhận thấy rằng việc tiếp cận với các thiết bị mới và hiện đại đối với sinh viên còn hết sức mới mẻ. Nên em rất mong muốn được nghiên cứu và tìm hiểu các đề tài mang tính thời sự, để nâng cao khả năng tiệp cận thực tiễn, tích luỹ kinh nghiệm để không khỏi bỡ ngỡ khi tham gia vào quá trình sản xuất công nghiệp.
Cuối cùng em xin chân thành cảm ơn các thầy cô giáo trong Khoa Điện_ Điện Lạnh, đặc biệt là thầy Đoàn Minh Hải cũng như các bạn trong lớp đã tạo điều kiện giúp đỡ, đóng góp ý kiến để chúng em có thể hoàn thành đề tài này.
Chúng em xin chân thành cảm ơn
PHỤ LỤC
Một số hình ảnh liên quan đến đề tài:
Cảm biến áp suất
Cáp truyền thôn RS 485
|
Bồn 1 (bể chứa) |
|
Bồn 2 (giếng) |
Hình ảnh mô hình
|
Bảng điều khiển |
Hình ảnh mô hình
Đấu dây tủ động lực
TÀI LIỆU THAM KHẢO
[1] Dương Minh Trí, Cảm biến và ứng dụng . NXB Khoa Học Và Kỹ Thuật.
[2] Đại học Bách Khoa Hà Nội, Giáo trình cảm biến .
[3] Đại học Bách Khoa TP HCM, Hướng dẫn thực tập tốt nghiệp .
[4] Đại học Bách Khoa Hà Nội , Tài liệu Cảm biến
[5] Tài liệu của Tập đoàn SIEMENS ELECTRIC.
[6] Phan Xuân Minh – Nguyễn Doãn Phước, Tự động hoá với SI MATIC S7 – 200, NXB Nông Nghiệp.
[7] Trang web : Nasaco.com.vn
MỤC LỤC:
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ĐỀ TÀI 1
1.1 Đặt vấn đề. 1
1.2 Giải quyết vấn đề. 1
CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ PLC S7-200. 3
2.1 Giới thiệu về PLC.. 3
2.2 Cấu trúc của PLC.. 3
2.3 Bộ xử lý trung tâm.. 4
2.4 Bộ nhớ. 4
2.5 Khối vào ra. 4
2.6 Phân loại PLC.. 5
2.7 Tổng quan về họ PLC S7-200 của hãng Siemens: 5
2.7.1 Hình dáng bên ngoài: 5
2.7.2 Cấu trúc phần cứng của hệ thống PLC S7-200. 7
2.7.3 Đơn vị xử lý trung tâm (CPU Central Procesing Unit): 8
2.7.4 Bộ nhớ:. 9
2.7.5. Khối vào/ ra: 9
2.7.6. Rơle: 9
2.7.7. Bộ đếm (Counter): 9
2.7.8. Bộ định thì (times): 10
2.8. Ngôn ngữ lập trình trong S7-200. 10
CHƯƠNG 3: GIỚI THIỆU CHUNG VỀ BIẾN TẦN SIMEN.. 12
3.1. Tổng quan về Biến tần MM440. 12
3.2. Cấu tạo chung và nguyên tắc hoạt động. 12
3.3. Các tính chất 13
3.4.Màn hình BOP. 14
CHƯƠNG 4: CẢM BIẾN ÁP SUẤT.. 16
4.1. Giới thiệu chung. 16
4.1.1. Khái niệm: 16
4.1.2.Phân loại cảm biến. 16
4.2. Cảm biến đo áp suất chất lưu. 18
4.2.1.Áp suất và nguyên lý đo áp suất. 18
4.2.1.1. Áp suất và đơn vị đo. 18
4.2.1.2. Nguyên lý đo áp suất. 19
4.2.2 Áp kế vi sai dựa trên nguyên tắc cân bằng thủy tĩnh. 21
4.2.2.1 Áp kế vi sai trong kiểu phao. 21
4.2.2.2. Áp kế vi sai kiểu chuông. 22
4.3 Cảm biến áp suất dựa trên phép đo biến dạng. 23
4.3.1 Phần tử biến dạng. 23
4.3.1.1.Ống trụ. 23
4.3.1.2. Lò xo ống. 24
4.3.1.3 Xiphong. 25
4.3.1.4 Màng. 26
4.4.1 Các bộ chuyển đổi điện. 27
4.4.1.1 Bộ biến đổi đo áp suất kiểu điện cảm.. 27
4.4.1.2. Bộ biến đổi kiểu biến áp vi sai 28
4.4.1.3. Bộ biến đổi kiểu điện dung. 29
4.4.1.4 Bộ biến đổi kiểu áp trở. 30
4.4.1.5 Bộ chuyển đổi kiểu áp điện. 31
4.5 Cảm biến dùng trong mô hình. 32
4.5.1 Cấu tạo và nguyên lý hoạt động. 32
4.5.2 Những ưu điểm của sensor áp suất với kỹ thuật bán dẫn. 36
4.5.3 Các đặc tính tĩnh và động của cảm biến. 36
4.5.3.1 Độ nhạy. 36
4.5.3.1.1 Định nghĩa. 36
4.5.3.1.2 Độ nhạy trong chế độ tĩnh. 36
4.5.3.1.3 Độ nhạy trong chế độ động. 37
4.5.4 Điều kiện có tuyến tính. 38
4.6 Kết quả khi đo tín hiệu ra của cảm biến áp suất 38
4.6.1 Các bước thực hiện. 38
4.6.2 Kết quả đo trên mô hình. 38
4.6.3 Đồ thị 39
CHƯƠNG 5: GIAO THỨC TRUYỀN THÔNG USS. 40
5.1. Các giao thức giao tiếp mạng trong S7 – 200. 40
5.1.1. Chuẩn truyền RS 485. 40
5.1.2. Giao thức PPI 41
5.1.3. Giao thức MPI 41
5.1.4. Freeport (giao thức người dùng tự định nghĩa). 41
5.1.5. USS Protocol 42
5.1.5.1 Điều kiện để sử dụng giao thức USS. 42
5.1.5.2. Trình tự lập trình sử dụng các lệnh USS như sau. 42
5.1.5.3. Thời gian cần thiết để giao tiếp. 43
5.1.5.4. Sử dụng các lệnh USS Protocol 43
5.2. Vòng điều khiển tín hiệu ổn định áp suất 47
5.3 Một số ví dụ về lệnh USS. 48
5.3.1 Khởi động USS. 48
5.3.2 Điều khiển động cơ với USS _ CTRL.. 48
CHƯƠNG 6: KẾT LUẬN.. 50
PHỤ LỤC.. 52
TÀI LIỆU THAM KHẢO.. 55
MỤC LỤC: 56