ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO ROBOT LAU KÍNH


NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO ROBOT LAU KÍNH
ĐỀ TÀI: ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO ROBOT LAU KÍNH
MỤC LỤC
LỜI CẢM ƠN.. 1
LỜI CAM ĐOAN.. 2
MỤC LỤC.. 3
DANH MỤC CÁC TỪ VIẾT TẮT.. 6
DANH MỤC HÌNH ẢNH.. 7
DANH MỤC BẢNG.. 9
BẢNG PHÂN CÔNG NHIỆM VỤ.. 10
CHƯƠNG 1: TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU.. 13
1.1 Giới thiệu chương. 13
1.2 Ứng dụng của đề tài13
1.3 Mục đích nghiên cứu. 13
1.4 Phương pháp và phương tiện nghiên cứu. 13
1.5 Lựa chọn phương pháp thực hiện đề tài14
1.6 Kết luận chương. 16
CHƯƠNG 2: CƠ SỞ LÍ THUYẾT CỦA ĐỀ TÀI17
2.1 Giới thiệu chương. 17
2.2 Cơ sở lý thuyết về cơ học. 18
2.3 Giới thiệu về DTMF. 20
2.3.1 DTMF là gì?. 20
2.3.2 Mạch giải mã DTFM... 21
2.3.3 Chức năng các khối của IC MT8870. 23
2.4 Vi điều khiển MSP430x2xx. 26
2.4.1 Giới thiệu chung về MSP430x2xx. 26
2.4.2 Các chân nhập, xuất28
2.4.3 Điều xung dựa trên các bộ Timer của MSP430x2xx. 31
2.5 Động cơ phân luồng. 34
2.5.1 Giới thiệu. 34
2.5.2 Đặc điểm kỹ thuật34
2.5.3 Động cơ DC không chổi than. 35
2.6 Cơ cấu chuyển động. 40
2.7 Kết luận chương. 41
CHƯƠNG 3: THI CÔNG ĐỀ TÀI42
3.1 Giới thiệu chương. 42
3.2 Mạch vi điều khiển. 43
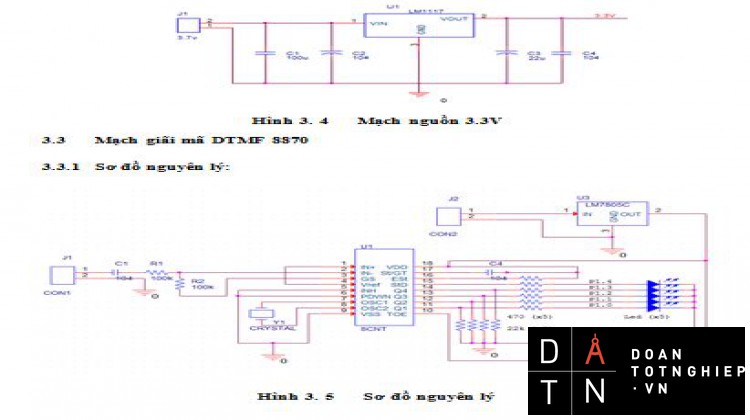
3.3 Mạch giãi mã DTMF 8870. 45
3.3.1 Sơ đồ nguyên lý:45
3.3.2 Nguyên lý hoạt động:46
3.4 Xây dựng chương trình điều khiển. 47
3.4.1 Điều khiển động cơ cánh quạt50
3.4.2 Điều khiển động cơ bánh xe. 54
3.4.3 Driver điều khiển động cơ DC ( Mạch cầu H ). 56
3.4.4 Buồng khí61
3.4.5 Phần lau kính. 62
3.4.6 Bảo mật62
3.5 Kết luận chương. 65
KẾT QUẢ, KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI66
KẾT QUẢ:66
KẾT LUẬN:66
HƯỚNG PHÁT TRIỀN ĐỀ TÀI66
TÀI LIỆU THAM KHẢO.. 67
PHỤ LỤC.. 68
DANH MỤC CÁC TỪ VIẾT TẮT
Từ viết tắt |
Tiếng Anh |
Tiếng Việt |
|
MCU |
Microcontroller Unit |
Vi điều khiển |
|
DC |
Direct Current |
Một chiều |
|
PWM |
Pulse Width Modulation |
Điều xung |
|
EDF |
Electric Ducted Fan |
Động cơ điện |
|
ESC |
Electronic Speed Controller |
Điều khiển tốc độ điện tử |
|
Li-Po |
Lithium Polymer |
Pin Li-Po |
|
GPIO |
General purpose I/O |
Chân xuất nhập chung |
DTFMDual-tone multi-frequency Âm thanh đa tần số
DANH MỤC HÌNH ẢNH
Hình 1. 1 Robot phát hiện vết nứt trên vỏ tàu. 14
Hình 1. 2 Robot leo tường sử dụng giác hút của ĐH Seoul15
Hình 1. 3 Mecho-Gecko đang leo trên cửa kính. 16
Hình 2. 1 Sơ đồ khối tổng quát17
Hình 2. 2 Phân bố các lực trên robot khi leo tường. 19
Hình 2. 3 Sơ đồ chân MT8870. 21
Hình 2. 4 Sơ đồ khối chức năng MT8870. 22
Hình 2. 5 Mạch steering. 24
Hình 2. 6 So sánh về các thành viên của họ MSP430x2xx3. 28
Hình 2. 7 Sơ đồ chân IC MSP430G2553. 29
Hình 2. 8 Sơ đồ khối Timer A.. 32
Hình 2. 9 Timer A, up mode. 33
Hình 2. 10 Ducted fan dùng trong máy bay. 34
Hình 2. 11 Cấu tạo một động cơ BLDC điển hình. 37
Hình 2. 12 Giản đồ so sánh dạng sóng sin ba pha và DC ba pha. 38
Hình 2. 13 Sơ đồ khóa và quá trình đóng cắt điều khiển động cơ BLDC.. 39
Hình 2. 14 Giản đồ dòng điện tương ứng ba pha của dây quấn stator. 39
Hình 3. 1 Sơ đồ khối42
Hình 3. 2 Kit MSP430G2553 LaunchPad. 44
Hình 3. 3 Mạch điều khiển trung tâm MSP430G2553. 44
Hình 3. 4 Mạch nguồn 3.3V.. 45
Hình 3. 5 Sơ đồ nguyên lý. 45
Hình 3. 6 Layout thi công. 46
Hình 3. 7 Lưu đồ thuật toán hàm main. 48
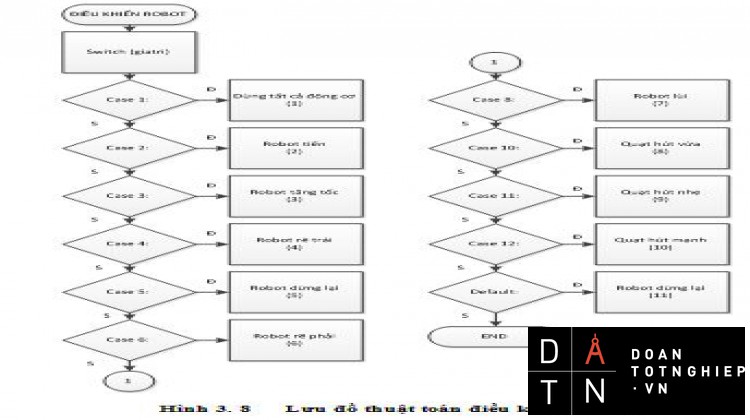
Hình 3. 8 Lưu đồ thuật toán điều khiển Robot49
Hình 3. 9 Bộ điều dòng ESC (của hãng TURNIGY). 51
Hình 3. 10 Ducted fan sử dụng trong đề tài52
Hình 3. 11 Pin Li-po 4 cell cung cấp cho cánh quạt53
Hình 3. 12 Kết nối giữa Pin-ESC-ducted fan. 53
Hình 3. 13 Phương thức điều khiển độ rộng xung. 53
Hình 3. 14 Động cơ giảm tốc được sử dụng trong đề tài.54
Hình 3. 15 Bánh xe được sử dụng trong đề tài55
Hình 3. 16 Pin Turnigy 3S 11.1V 2200mAh. 56
Hình 3. 17 Kit mạch cầu H.. 56
Hình 3. 18 IC L298N.. 57
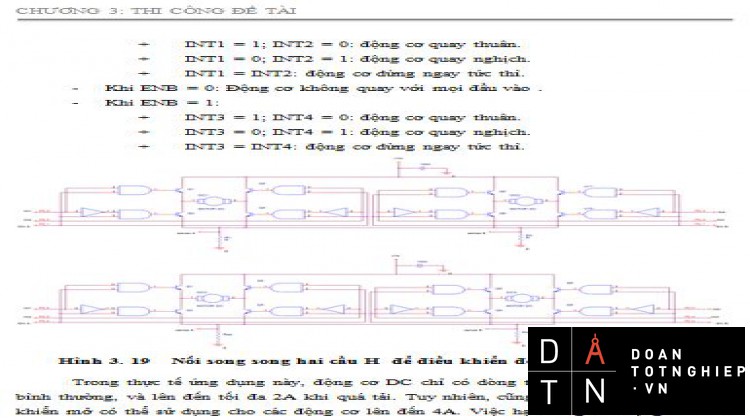
Hình 3. 19 Nối song song hai cầu H để điều khiển động cơ lên đến 4A.58
Hình 3. 20 Mạch bảo vệ. 60
Hình 3. 21 Đáp ứng điện áp theo thời gian khi có ngắn mạch. 60
Hình 3. 22 Bề mặt buồng khí61
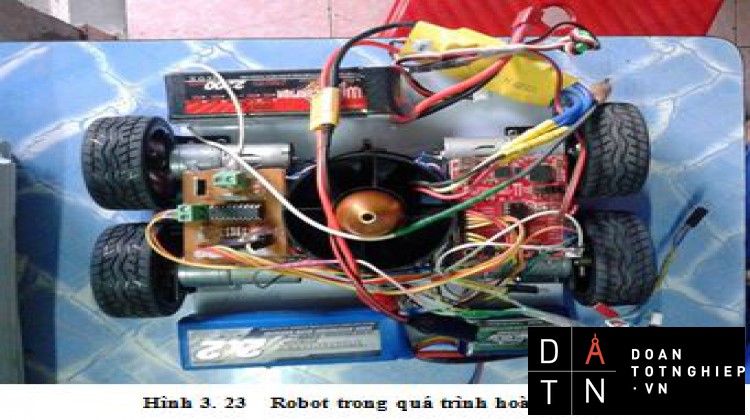
Hình 3. 23 Robot trong quá trình hoàn thiện. 62
Hình 3. 24 Lưu đồ thuật toán kiểm tra mật khẩu. 64
DANH MỤC BẢNG
Bảng 2. 1 Các tần số DTFM... 20
Bảng 2. 2 Chức năng từng chân của MT8870. 22
Bảng 2. 3 Bảng mã chức năng. 26
Bảng 2. 4 PxSEL và PxSEL2. 30
Bảng 2. 5 Các mode ứng với từng giá trị của OUTMODx. 33
BẢNG PHÂN CÔNG NHIỆM VỤ
|
Nhiệm vụ |
Hồ Đức Huy |
Nguyễn Văn Cường |
|
- Tìm hiểu cơ sở lý thuyết |
P |
P |
|
- Lựa chọn linh kiện |
P |
P |
|
- Mô phỏng mạch xử lý trung tâm |
|
P |
|
- Layout và thi công mạch giải mã |
P |
|
|
- Thiết kế phần cứng |
P |
P |
|
- Đo đạc, kiểm tra mạch |
P |
P |
|
- Đánh giá kết quả |
P |
P |
|
- Viết báo cáo |
P |
P |
MỞ ĐẦU
Ngày nay, việc ứng dụng khoa học kỹ thuật vào đời sống con người đã làm thay đổi căn bản diện mạo của thế giới. Từ công nghệ điện tử, máy tính, truyền thông đến hóa học, năng lượng… đã giúp chúng ta thuận tiện, dễ dàng hơn và đạt hiệu quả cao hơn trong công việc. Trong những lĩnh vực đó, công nghệ robot cũng đã góp một phần hữu hiệu vào những thành tựu đã đạt được. Robot trở thành một cánh tay đắc lực cho con người, làm những việc con người không làm được, tần suất 24/24 giờ và trong những môi trường nguy hiểm đến tính mạng, sức khỏe con người. Xã hội càng phát triển thì những tòa nhà cao tầng mọc lên càng nhiều, một khó khăn nảy sinh trong việc vệ sinh các ô cửa kính bên ngoài tòa nhà ở độ cao hàng chục, thậm chí hàng trăm mét thực sự là một thử thách đối với con người, khi công nhân phải đối mặt với rất nhiều rủi ro nếu phải thực hiện công việc đó một cách thủ công. Lấy cảm hứng từ đó, chúng em thực hiện đề tài “Robot lau kính”.
Đề tài được chia thành 3 chương có nội dung như sau:
Chương 1: Tổng quan về đề tài nghiên cứu
Chương này sẽ giới thiệu tổng quát về mục đính nghiên cứu, ứng dụng của nghiên cứu, phương pháp nghiên cứu, cách lựa chọn phương pháp thực hiện đề tài.
Chương 2: Cơ sở lí thuyết của đề tài
Chương này sẽ giới thiệu về cơ sở lí thuyết, các thiết bị được sử dụng trong đề tài.
Chương 3: Thi công đề tài
Chương này sẽ là phần thi công thực tế đề tài, cách xây dựng lưu đồ thuật toán, cách điều khiển các động cơ có trong robot, giới thiệu các linh kiện thực tế, thiết kế mạch, thiết kế robot.
Kết luận và hướng phát triển đề tài
Sau một thời gian nghiên cứu, thi công và chạy thử đề tài “thiết kế robot lau kính” đã hoàn thành và đạt một số kết quả sau:
- Tìm hiểu về cấu tạo, nguyên lý hoạt động của các loại robot leo tường lau kính thông dụng hiện nay.
- Phân tích các thông số kỹ thuật và phương án thiết kế một robot leo tường dùng nguyên lý phản lực cơ bản.
- Thiết kế khung robot, thiết kế mạch, viết chương trình điều khiển robot qua sóng điện thoại.
- Chạy demo sản phẩm.
CHƯƠNG 1: TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU
1.1 Giới thiệu chương
Chương một sẽ giới thiệu khái quát về ứng dụng của đề tài, mục đích nghiên cứu, phương pháp và phương tiện nghiên cứu, cũng như đưa ra lựa chọn phương án thi công đề tài để đạt hiệu quả tốt nhất, phù hợp với khả năng, nguồn nguyên liệu sẵn có và giá thành hiện nay.
1.2 Ứng dụng của đề tài
Robot có khả năng di chuyển trên các mặt phẳng thẳng đứng hay trần nhà dựa vào nguyên tắc khí động học được tạo ra từ cánh quạt phản lực gắn trên thân. Tín hiệu điều khiển được truyền qua tín hiệu DTMF của điện thoại. Khi hoàn thành, robot có thể thay thế con người trong việc vệ sinh cửa kính ở mặt ngoài các tòa nhà cao tầng một cách an toàn và hiệu quả.
1.3 Mục đích nghiên cứu
Tạo ra một ứng dụng trong đó sử dụng Robot leo tường để lau kính, giúp con người tiết kiệm được thời gian cũng như công sức để vệ sinh nhà ở hoặc văn phòng làm việc của mình. Ngoài ra, ứng dụng còn có thể áp dụng cho các tòa nhà cao tầng nhằm giảm nguy hiểm có thể xảy ra cho các công nhân làm việc ở đây.
1.4 Phương pháp và phương tiện nghiên cứu
- Phương pháp khảo cứu tài liệu:
Tham khảo, tra cứu từ các tài liệu có liên quan để thấu hiểu những kiến thức có liên quan đến đề tài đang thực hiện.
Phương tiện: Tạp chí chuyên ngành; các sách kỹ thuật chuyên môn; các website, diễn đàn trực tuyến, …
- Phương pháp thực nghiệm:
Trực tiếp thi công mạch, từ những kinh nghiệm, những qui trình thực tế rút ra các kết quả chính xác đưa vào đồ án.
Phương tiện: Các dụng cụ liên quan phục vụ cho quá trình thi công.
1.5 Lựa chọn phương pháp thực hiện đề tài
Việc chế tạo robot lau tường đã không còn mới mẻ trên thế giới nữa, người ta đã nghĩ đến nhiều giải pháp khác nhau giúp robot có thể di chuyển ở điều kiện ngược với trọng lực như dùng lực hút nam châm, giác hút chân không hay mô phỏng khả năng của các loài bò sát như thằn lằn, rắn mối… Những giải pháp trên đã đạt được một số thành tựu đáng kể nhưng những khó khăn gặp phải cũng không ít, đó là nguyên nhân tại sao mảng đề tài này vẫn chưa được ứng dụng rộng rãi vào cuộc sống.
Ví dụ như việc dùng lực hút nam châm chỉ được hỗ trợ trong môi trường có bề mặt là các chất có từ tính như vách tường bằng sắt, thân tàu ngầm, ô tô…
Hình 1. 1 (a) Robot phát hiện vết nứt trên vỏ tàu
(b) VEX Magnetic Climbing Robot Model 2
Kiểu thứ 2 là sử dụng giác hút. Trường đại học Seoul National University, Seoul, Hàn Quốc đã phát triển một số phiên bản của loại robot này. Các van cơ học điều khiển các miếng hút khiến robot có thể bám dính vào bề mặt một lực tương đối lớn, nhưng với kiểu thiết kế này, việc di chuyển robot khá khó khăn và không phù hợp với những công việc trên bề mặt không thực sự bằng phẳng.
Hình 1. 2 Robot leo tường sử dụng giác hút của ĐH Seoul
Một giải pháp khác khá mới mẻ là robot phỏng sinh học. Để có thể bám trên tường, robot sử dụng các miếng tiếp xúc được gắn dưới chân giống như một con tắc kè. PEDA Labs và University of California Berkeley đã thiết kế một con robot như vậy có tên là Mecho-Gecko.
Hình 1. 3 Mecho-Gecko đang leo trên cửa kính
Cũng giống như việc dùng giác hút, robot kiểu này không thể di chuyển linh động được và kinh phí cho các miếng tiếp xúc thường khá cao.
Giải pháp cuối cùng cũng là giải pháp chúng em lựa chọn cho đề tài này là sử dụng nguyên lý động học. Ưu điểm của nó là không quá phức tạp và đắt đỏ, robot cũng có thể di chuyển một cách rất linh hoạt như ở mặt đất. Chi tiết sẽ được chúng em giới thiệu ngay sau đây.
1.6 Kết luận chương
Chương một cho ta một cách nhìn khái quát về mục đích nghiên cứu và ứng dụng của đề tài “ Robot leo tường lau kính ” cũng như qua nghiên cứu các phương pháp và sản phẩm tương tự đã có trên thế giới để đưa ra phương án thi công đề tài tối ưu nhất.
CHƯƠNG 2: CƠ SỞ LÍ THUYẾT CỦA ĐỀ TÀI
2.1 Giới thiệu chương
Trong chương hai sẽ giới thiệu sơ đồ khối tổng quát, tìm hiểu về cơ sở lý thuyết cơ học. Nghiên cứu về DTMF, về sơ đồ khối và chức năng các khối của IC giãi mã MT8870. Giới thiệu về họ vi điều khiển MSP430x2xx3 và các thiết bị được sử dụng để thi công robot.
Hình 2. 1 Sơ đồ khối tổng quát
Lợi dụng khả năng truyền tín hiệu DTMF từ bàn phím điện thoại, ta tích hợp thêm một bộ giải mã DTMF (dùng IC MT8870). Đầu ra của bộ giải mã này là mã BCD 4 bit ứng với phím được bấm ở điện thoại điều khiển. Tín hiệu này được cung cấp cho MCU MSP430 giải mã tương ứng với lệnh cần điều khiển để xuất ra các cơ cấu chấp hành là bộ điều dòng ESC dùng để điều khiển cánh quạt phản lực Ducted Fan và kit điều khiển motor nối với 4 motor trên robot.
2.2 Cơ sở lý thuyết về cơ học
Như đã giới thiệu, sở dĩ robot có thể di chuyển trên bề mặt thẳng đứng là nhờ có cánh quạt phản lực quay với vận tốc lớn, tạo ra chênh lệch áp suất giữa trong và ngoài buồng khí, khi áp lực lớn hơn trọng lực của thân robot thì nó có thể di chuyển được.
Công thức tính chênh lệch áp suất:
Trong đó:
P_in: Áp suất trong buồng khí
P_at: Áp suất khí quyển
A: Diện tích buồng khí
Từ đó ta có được:
Lực ma sát khi robot di chuyển:
Với:
R: Lực ma sát
N: Phản lực của tường tác dụng lên robot
k: Hệ số ma sát (phụ thuộc vào bề mặt)
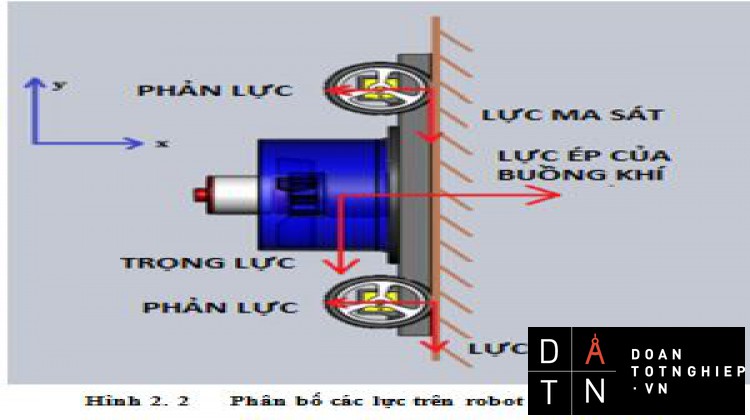
Hình 2. 2 Phân bố các lực trên robot khi leo tường
Khi robot đứng yên trên mặt phẳng thẳng đứng, lực ép của buồng khí phải bằng với phản lực (theo định luật 3 Newton).
Hay:
Vì lực nén của robot lên tường là thành phần theo phương x trong khi trọng lực tác dụng theo phương y, nên lực để đẩy robot tiến lên tối thiểu phải bằng trọng lực.
Để cải thiện khả năng bám của robot, ta nên:
- Dùng bánh xe có độ bám tốt để tăng hệ số ma sát k
- Tăng diện tích tiếp xúc của buồng khí với mặt tường (tăng A)
- Tăng phản lực của cánh quạt để tạo chênh lệch áp suất lớn hơn (giảm P_in)
2.3 Giới thiệu về DTMF
2.3.1 DTMF là gì?
DTMFviếttắtcủaDual-tonemulti-frequencylà mộtloạitínhiệubáohiệu đượcdùngtrongviễnthông, khitabấmmộtphímtrênbànphím, nó sẽphátramột âmriêngbiệtlà sựtrộnlẫncủa 2 tầnsốkhácnhau. Cáctầnsố đượcchọnlà nhữngtầnsố đặcbiệt, ítgặptrongcuộcsống. Vì mỗiphímtrênbànphímứngvớimột âmriêngbiệt, và có thểtruyềntừ điệnthoạinàysang điệnthoạikháckhi 2 bên đã thôngthoạivớinhau, nênnếugiảimã đượctínhiệunày, tasẽtìm đượctínhiệu điềukhiểntừ điệnthoạibênkia.
Ưu điểm:
- Phạm vi điều khiển xa, chỉ cần 2 điện thoại nằm trong vùng phủ sóng là có thể sử dụng được.
- Có tính bảo mật cao: ta có thể cài đặt mật khẩu để phân biệt đâu là tín hiệu điều khiển hợp lệ.
- Độ ổn định cao và ít bị nhiễu.
|
|
1209 Hz |
1336 Hz |
1477 Hz |
|
697 Hz |
1 |
2 |
3 |
|
770 Hz |
4 |
5 |
6 |
|
852 Hz |
7 |
8 |
9 |
|
942 Hz |
* |
0 |
# |
Bảng 2. 1 Các tần số DTFM
................................................
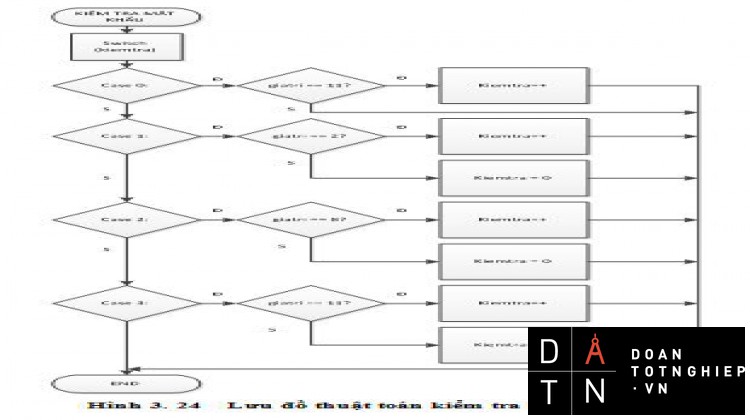
Hình 3. 24 Lưu đồ thuật toán kiểm tra mật khẩu
Sau khi nhận tín hiệu mật khẩu từ đầu vào, thực hiện kiểm tra biến kiemtra:
- Nếu kiemtra!=4: mật khẩu sai, Robot đứng yên.
- Nếu kiemtra=4: mật khẩu đúng, bắt đầu điều khiển Robot.
3.1 Kết luận chương
Ở chương này, chúng em đã cơ bản thiết kế được sản phẩm theo như yêu cầu của đề tài.
- Giải mã thành công tín hiệu điều khiển từ điện thoại.
- Thiết kế được robot có khả năng di chuyển trên mặt phẳng thẳng đứng và trần.
- Bảo mật điều khiển bằng mật khẩu.
KẾT QUẢ, KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI
KẾT QUẢ:
Sau một thời gian nghiên cứu, thi công và chạy thử đề tài “thiết kế robot leo tường” đã hoàn thành và đạt một số kết quả sau:
- Tìm hiểu về cấu tạo, nguyên lý hoạt động của các loại robot leo tường thông dụng hiện nay.
- Phân tích các thông số kỹ thuật và phương án thiết kế một robot leo tường dùng nguyên lý phản lực cơ bản.
- Thiết kế khung robot, thiết kế mạch, viết chương trình điều khiển robot qua sóng điện thoại
- Chạy demo sản phẩm
KẾT LUẬN:
- Đề tài về cơ bản đã đạt được các mục tiêu đề ra, song vì một số khó khăn về kinh phí và kỹ thuật gặp phải nên kết quả chưa thực sự mỹ mãn.
- Ở một chừng mực nhất định, đề tài còn gặp khá nhiều thiếu sót cần phải bổ sung để hoàn thiện hơn, chúng em rất mong nhận được sự nhận xét và góp ý của quý thầy cô để chúng em có thể phát triển lên các phiên bản cao hơn.
HƯỚNG PHÁT TRIỀN ĐỀ TÀI
- Bổ sung thêm cảm biến để xác định vị trí và trạng thái của robot, giúp robot có thể tự hành được
- Robot leo tường có thể thực hiện rất nhiều mục đích của con người: từ quan trắc, điều khiển đến cứu hộ, vệ sinh… nên nếu tích hợp được một số phụ phần thì kết quả sẽ rất thú vị.
- Hướng đề tài của chúng em là phát triển thêm để đạt được mục tiêu là thiết kế “ROBOT LAU KÍNH CHO CÁC TÒA NHÀ CAO TẦNG”
TÀI LIỆU THAM KHẢO
[1] John Davies, “MSP430 Microcontroller basics”, Elsevier Ltd, 2008.
[2] Help software IAR Embedded Workbech IDE
[3] Datasheet MSP430G2553
[4] Jizhong Xiao and Ali Sadegh, “InTech-City climber a new generation wall climbing robots”
[5] www.diendanti.com.vn
[6] www.google.com
[7] http://banlinhkien.vn/
[8] http://www.luanairmodels.com/
[9] http://diendanxedapdien.hkbike.com.vn/
[10] Co_so_ly_thuyet_MSP430
PHỤ LỤC
CODE:
#include
volatile unsigned int kiemtra;
/*===============================================================================================
Name : main
Description :
Argument(s) :
Return value : None.
================================================================================================*/
void main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
BCSCTL1 = CALBC1_1MHZ; // chon nguon clock
DCOCTL = CALDCO_1MHZ;