đồ án tốt nghiệp nghiên cứu và thiết kế máy phay CNC 2023
NỘI DUNG ĐỒ ÁN
MỤC LỤC Nghiên cứu và thiết kế máy phay CNC
LỜI MỞ ĐẦU
CHƯƠNG I : GIỚI THIỆU VỀ MÁY CNC
I.LỊCH SỬ PHÁT TRIỂN MÁY CNC
I.1. CNC là gì?
I.2. Lịch sử hình thành và phát triển
- 3. Lợi ích của máy CNC
I.3.1 Tự động hóa sản xuất
I.3.2 Độ chính xác và lặp lại cao của sản phẩm
I.3.3 Linh hoạt
II. PHẠM VI ỨNG DỤNG
CHƯƠNG II: THIẾT KẾ TRUYỀN ĐỘNG
* ĐẶT YÊU CẦU THIẾT KẾ
I.GIỚI THIỆU VỀ KẾT CẤU thÔng sỐ MÁY PHAY CNC.
II.1. THIẾT KẾ HỆ CHUYỂN ĐỘNG CHAY DAO.
II.1.2 Nhiệm vụ của truyền động chạy dao
II.1.4 Trục vít me - đai ốc
II.2. Chọn động cơ đầu cắt
II.2.1. Xác định thông số dao sử dụng
II.2.2. Phân tích lực tác dụng lên đầu dao
II.2.3. Xác định công suất và mômen xoắn trên trụ động cơ
II.2.3.1.Công suất và mômen xoắn của động cơ khi gia công với dao có đường kính nhỏ nhất
II.2.3.2. Công suất và mômen xoắn của động cơ khi gia công với dao có đường kính lớn nhất
II.3. Chọn động cơ trục Z
II.3. 1. Lực chiều trục khi khoan
II.3.2. Công suất động cơ trục Z
II.4. Chọn động cơ trục Y
II.5. Chọn động cơ trục X
II.6. Tính toán thiết kế bộ truyền động
II.6. 2. Bộ truyền động trục Y
II.6. 2.1. Xác định môdun và chiều rộng đai
II.6. 2.2. Xác định thông số bộ truyền đai
II.6. 2.3. Kiểm nghiệm đai về lực vòng riêng
II.6. 3. Bộ truyền động trục X
II.6. 3.1. Xác định môdun và chiều rộng đai
II.6. 3.2. Xác định thông số bộ truyền đai
II.6. 3.3. Kiểm nghiệm đai về lực vòng riêng
II.7. Kiểm nghiện độ bền trục vít me
*THIẾT KẾ MẠCH ĐIỀU KHIỂN
* Thiết kế chế tạo mạch
1. KHỐI PC
2. KHỐI ĐIỀU KHIỂN TRUNG TÂM
3. KHỐI MẠCH CÔNG SUẤT
4.KHỐI NGUỒN
4.1 Khối nguồn 5V
4.2. Khối nguồn 12V
4.3. Khối nguồn 24V
5. KHỐI GIAO TIẾP MÁY TÍNH VÀ MẠCH ĐIỀU KHIỂN TRUNG TÂM
6. KHỐI ĐỆM TÍN HIỆU
7. KHỐI BẬT TẮT ĐẦU CẮT
8. KHỐI CÔNG SUẤT
9. SƠ ĐỒ NGUYÊN LÝ MẠCH CÔNG SUẤT
*THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN MÁY PHAY CNC
1. Mô hình trục chuyển động quay
2.Phương trình động lực học của trục này được biểu diễn
3. Đánh giá tính ổn định và chất lượng của hệ thống điều khiển
4. Mô phỏng gia công
KẾT LUẬN
KẾT LUẬN CHUNG
TÀI LIỆU THAM KHẢO
CHƯƠNG I : GIỚI THIỆU VỀ MÁY CNC
I. LỊCH SỬ PHÁT TRIỂN MÁY CNC
I.1. CNC là gì?
CNC: Computer Numerical Control - Điều khiển số máy công cụ được tích hợp máy tính.Thuật ngữ CNC là một khái niệm mà hầu như bất kì ai học tập, nghiên cứu trên lĩnh vực Tự động hoá đều biết: Đó là loại thiết bị điều khiển sử dụng trong các máy gia công, chế biến. Cho phép thực hiện các quy trình gia công trên cơ sở các thông số về kích thước, hình dáng của sản phẩm, chuyển sang thành quỹ đạo chuyển động trên không gian ba chiều.
I.2. Lịch sử hình thành và phát triển
Trước đây, các chi tiết máy hoặc khuôn mẫu phức tạp thường được chia thành những phần nhỏ, đơn giản. Sau đó, chúng được ghép nối lại với nhau thành chi tiết hoàn chỉnh bằng phương pháp hàn, tán. Việc gia công này không đảm bảo độ chính xác cao, chi phí tốn kém. Sau này nhờ công nghệ chép hình có thể gia công được những chi tiết phức tạp hơn. Tuy vậy, việc gia công này vẫn còn nhiều nhược điểm như năng suất thấp và với khó đảm bảo độ chính xác cao. Vì vậy, việc áp dụng điều khiển số vào máy công cụ là một bước tiến nhảy vọt về công nghệ gia công. Nó đảm bảo độ chính xác cao, có thể gia công được các chi tiết phức tạp.
Vào những năm 80 của thế kỉ 19, những tấm thẻ đục lỗ được sử dụng trong khung cửi ngành dệt. Trước đó, trong ngành công nghiệp dầu mỏ và hoá chất đã sử dụng khái niệm này để điều khiển quá trình. Những mẫu đàn piano cổ cũng sử dụng nguyên lý điều khiển kiểu NC.
Mẫu đầu tiên của máy công cụ điều khiển số NC – Numerical Control do Viện công nghệ Massachusetts - Mỹ thiết kế và chế tạo năm 1949, theo đặt hàng của Không lực Hoa kỳ, để sản xuất các chi tiết phúc tạp và chính xác của máy bay. Năm 1952, chế tạo thành công mẫu máy 3 trục và đến năm 1964 có 3500 chương trình NC được sử dụng. Tuy nhiên, các bộ điều khiển số đầu tiên dung đèn điện tử nên tốc độ xử lý chậm, tiêu tốn nhiều năng lượng, kích thước lớn. Không có màn hình giao diện nên việc điều khiển gặp khó khăn. Khi công nghệ bán dẫn phát triển, việc ứng dụng công nghệ bán dẫn làm cho máy NC gọn hơn, tốc độ xử lý cao hơn.. Các băng đục lỗ thay bằng băng hoặc đĩa từ. Nhưng tính năng sử dụng của máy NC vẫn chưa được cải thiện.
Sự xuất hiện IC (1959), LSI (1965), vi xử lý ( 1974) và các tiến bộ kỹ thuật vể lưu trữ và xử làm thay đổi to lớn trong sự phát triển của máy công cụ. Các bộ điều khiển trên máy công cụ được tích hợp máy tính. Việc điều khiển thông qua bàn phìm và giao diện màn hình máy tính nên việc điều khiển trở nên dễ dàng hơn.
Chúng ta đã có bước tiến từ ống chân không và máy cơ khí lặp lại tới công nghệ cao dòng điện tích hợp dày đặc. Khả năng của điều khiển tới phát sinh của 3 kích thước tạo hình được mở rộng. Ngày nay, bộ vi xử lý điều khiển (CNC) có khả năng xử lý cao. Nó có thể đưa ra lệnh điều khiển, cất giữ, phân tích chương trình và giao diện với người sử dụng. Đồng thời nó có thể giám sát chất lượng sản phẩm, thay đổi dụng cụ khi cần thiết và truyền thông với các máy tính khác, robot như việc tải và gửi chương trình. Những máy CNC có thể phân tích những vấn đề bên trong và cảnh báo cho người sử dụng biết những vấn đề nguy hiểm. Sự khác nhau lớn nhất giữa máy NC và CNC là khả năng của bộ điều khiển. Máy NC không có khả năng phân tích, giám sát như máy CNC.
Hiện nay, với việc áp dụng Cad/Cam (thiết kế và sản xuất có trợ giúp của máy tính) vào việc thiết kế, tính toán kết cấu, mô phỏng quá trình gia công... đã trợ giúp hiệu quả cho quá trình thiết kế và điều khiển.
Chính vì những tính năng nổi bật của máy CNC mang lại nên chúng được sử dụng rộng rãi trên toàn thế giới. Ở nước ta, trong hơn 10 năm qua Nhà nước đã đầu tư nhiều nhằm mục tiêu tạo ra thiết bị CNC.
- 3. Lợi ích của máy CNC
I.3.1 Tự động hóa sản xuất
Máy CNC không chỉ quan trọng trong ngành cơ khí mà còn trong nhiều ngành khác như may mặc, giày dép, điện tử v.v. Bất cứ máy CNC nào cũng cải thiện trình độ tự động hóa của doanh nghiệp: người vận hành ít, thậm chỉ không còn phải can thiệp vào hoạt động của máy. Sau khi nạp chương trình gia công, nhiều máy CNC có thể tự động chạy liên tục cho tới khi kết thúc, và như vậy giải phóng nhân lực cho công việc khác. Thứ nữa, ít xảy ra hỏng hóc do lỗi vận hành, thời gian gia công được dự báo chính xác, người vận hành không đòi hỏi phải có kỹ năng thao tác (chân tay) cao như điều khiển máy công cụ truyền thống.
I.3.2 Độ chính xác và lặp lại cao của sản phẩm
Các máy CNC thế hệ mới cho phép gia công các sản phẩm có độ chính xác và độ phức tạp cao mà máy công cụ truyền thống không thể làm được. Một khi chương trình gia công đã được kiểm tra và hiệu chỉnh, máy CNC sẽ đảm bảo cho “ra lò” hàng loạt sản phẩm phẩm với chất lượng đồng nhất. Đây là yếu tố vô cùng quan trọng trong sản xuất công nghiệp quy mô lớn
I.3.3 Linh hoạt
Chế tạo một chi tiết mới trên máy CNC đồng nghĩa với nạp cho máy một chương trình gia công mới. Được kết nối với các phần mềm CAD/CAM, công nghệ CNC trở nên vô cùng linh hoạt giúp các doanh nghiệp thích ứng với các thay đổi nhanh chóng và liên tục về mẫu mã và chủng loại sản phẩm của khách hàng.
II. PHẠM VI ỨNG DỤNG
Thuật ngữ CNC trỏ vào một khái niệm mà hầu như bất kì ai học tập, đào tạo, nghiên cứu trên lĩnh vực Tự động hóa đều biết: Đó là loại thiết bị điều khiển sử dụng trong các máy gia công/chế biến, cho phép thực hiện các quy trình gia công/chế biến trên cơ sở các thông số về kích thước/hình dáng của sản phẩm, chuyển sang thành quỹ đạo chuyển động trên không gian 3 chiều.
Xuất phát từ các ứng dụng ban đầu của công nghệ chế tạo máy, chủ yếu là gia công cắt gọt kim loại, hiện tại CNC được dùng trong nhiều loại máy thuộc các lĩnh vực khác nhau: trải dài từ chế tạo máy tới ngành dệt may, điều khiển robot hay chế tạo thiết bị điện tử. Từ dạng thiết bị NC (Numerical Control) đơn giản bằng vi mạch Lôgic rời ở đầu thập kỉ 70 (của thế kỉ trước) tới CNC ngày nay sử dụng các loại vi điều khiển với tính năng mạnh. Trong nhiều ứng dụng, thậm chí ta không thể hình dung ra được sự thiếu vắng của CNC, đặc biệt là công nghệ chế tạo máy, ngành công nghệ đẻ ra các máy cái, phục vụ cho mọi ngành công nghiệp khác. Chính vì vậy, thật dễ hiểu khi chúng ta - một đất nước còn chậm phát triển - đã và đang nỗ lực tìm ra con đường đi để tiến tới thiết bị CNC của riêng mình. Bây giờ chúng ta sẽ đi vào một số máy ứng dụng cụ thể:
Hình 1.1: Mô hình máy khoan CNC loại 2 và 3 trục
Hình 1.2: Hai dạng máy khoan đứng với khả năng tự động thay mũi khoan
Hình 1.3: Máy phay 5 trục có trục chính nằm ngang
Hình 1.4: Máy phay 5 trục có trục chính thẳng đứng
Hình 1.5: Máy phay 5 trục loại thay dao thủ công (trái) và loại có 4 trục chính song song (phải)
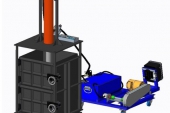
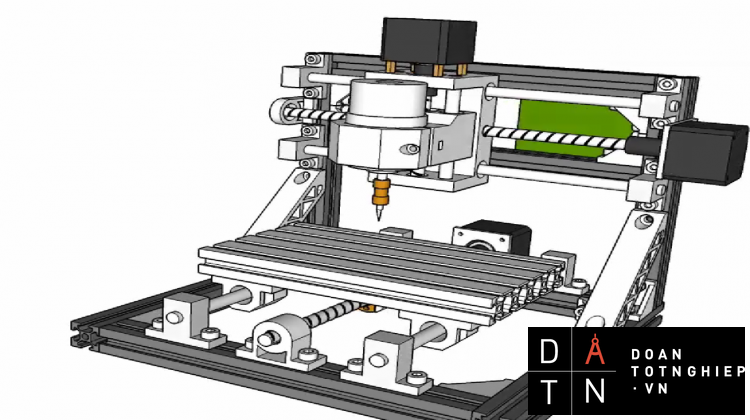
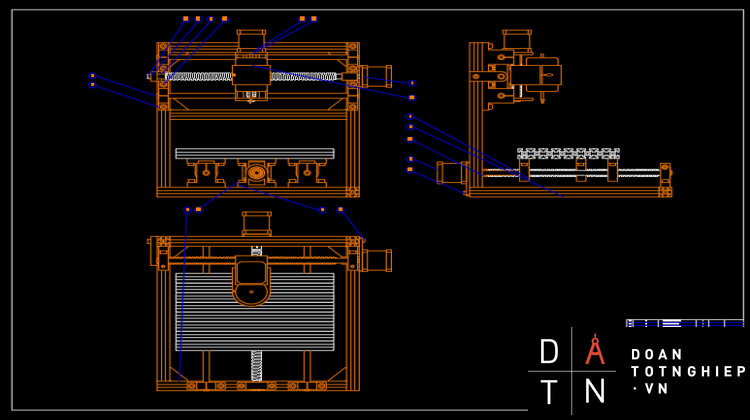
Hình 1.6: Máy phay CNC
CHƯƠNG II: THIẾT KẾ TRUYỀN ĐỘNG
* ĐẶT YÊU CẦU THIẾT KẾ
- Thiết kế loại máy phay CNC 3 trục loại nhỏ với giá thành hợp lý
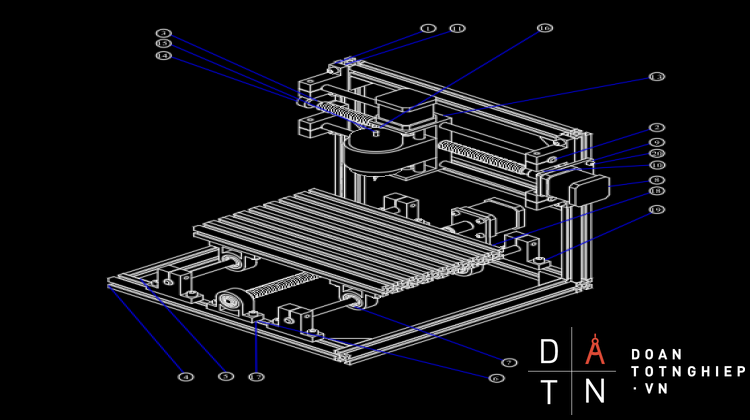
I.GIỚI THIỆU VỀ KẾT CẤU thÔng sỐ MÁY PHAY CNC.
* Thông số kỹ thuật dự kiến đạt được sau khí chế tạo:
+ Khung máy: Để tăng độ cứng vững cho máy, dễ cho quá trình chế tạo và lắp ráp máy ta chọn vật liệu là khung là nhôm hợp kim A5052H112.
+ Trục chay dao: Đây là bộ phận quan trọng ảnh hưởng trực tiếp tới chất lượng của sản phẩm gia công.Để giảm sai số gia công, ma sát chuyển động ta sử dụng thanh trượt bi, vít me - đai ốc bi và sử dụng bộ chuyền động đai răng.
+ Mạch công suất: Thiết kế mạch công suất sử dụng mosfet để tăng công suất điều khiển, sử dụng được động cơ có dòng điều khiển lớn.
+ Điều khiển: Lập trình điều khiển phối hợp các trục, xây dựng các modul bộ nội suy.Sử dụng Visual Basic để thiết kế giao diện
II.1. THIẾT KẾ HỆ CHUYỂN ĐỘNG CHAY DAO.
Hỡnh 2.1: truyền động chay dao
Cấu trúc của một hệ truyền động chạy dao được thể hiện như trờn. Hệ truyền động bao gồm: một động cơ dẫn động qua một cặp truyền động nữa đi tới bộ vít me-đai ốc biến chuyển động quay thành chuyển động tịnh tiến. Đó là phương thức tiêu chuẩn của một hệ truyền động chạy dao hiện đại.
II.1.2 Nhiệm vụ của truyền động chạy dao
Nhiệm vụ chính của các hệ truyền động chạy dao là chuyển đổi các lệnh trong bộ điều khiển thành các chuyển động tịnh tiến hay quay tròn của những bàn máy mang dao hoặc chi tiết gia công trên máy công cụ. Các chuyển động tịnh tiến là các chuyển động thẳng theo phương ba trục toạ độ của không gian ba chiều, còn các chuyển động quay tròn là các chuyển động xung quanh các trục toạ độ này.
Chuyển động chạy dao là chuyển động dịch chuyển tương đối giữa dao và chi tiết theo một phương trình xác định và phải đảm bảo được tốc độ cắt.
Truyền động chạy dao phải đảm bảo dịch chuyển của dụng cụ cắt theo quỹ đạo và đảm bảo các yếu tố: biên dạng đường cắt, biên dạng của dụng cụ cắt và các yêu cầu chi tiết gia công khác phải đạt được, do đó sẽ có các động cơ khác nhau điều khiển chuyển động cắt.
Hệ truyền động chạy dao của một máy công cụ CNC phải thể hiện được những tính chất sau đây:
+ Có tính động học cao: nếu đại lượng dẫn biến đổi, bàn máy phải theo kịp biến đổi đó trong khoảng thời gian ngắn nhất.
+ Có độ ổn số vòng quay cao: khi các lực cản chạy dao biến đổi, cần hạn chế tới mức thấp nhất ảnh hưởng của nó đến tốc độ chạy dao, tốt nhất là không ảnh hưởng gì. Ngay cả khi chạy dao tốc độ nhỏ nhất cũng đòi hỏi một quá trình tốc độ ổn định.
+ Phạm vi điều chỉnh số vòng quay lớn.
+ Phải giải quyết được cả độ phân giải kích thước nhỏ nhất (£ 1mm).
II.1.3 Cơ sở tính toán cho chuyển động chạy dao.
Lực tác dụng lên đai ốc được tính theo công thức:
F = ( CT 5-2 [4] )
Trong đó:- hệ số ma sát giữ vít me và đai ốc;
- Góc nghiêng của biên dạng ren;
tv - bước vít me, mm;
F - lực tác dụng lên vít me - đai ốc, N;
T - Mô mem đặt lên trục vít me, N.m;
dm- đường kính danh nghĩa của trục vít me, mm.
II.1.4 Trục vít me - đai ốc
Hình 2.2: Mô hình truyền động vít me-đai ốc
Truyền động vit me - đai ốc được dùng để biến chuyển động quay thành chuyển động tịnh tiến nhờ cơ cấu vít trượt.
II.2. Chọn động cơ đầu cắt
II.2.1. Xác định thông số dao sử dụng
Với yêu cầu của thiết kế, ta chọn dao gia công là dao phay ngón.
* Bảng thông số các dao sử dụng:
+ Dao phay ngón chuôi trụ, mm:
D |
L |
l |
Số răng dao theo loại |
|
2,0 |
39 |
7 |
3 |
|
2,5 |
40 |
8 |
3 |
|
3,0 |
40 |
8 |
4 |
|
3,5 |
42 |
10 |
4 |
|
4,0 |
43 |
11 |
4 |
Góc nghiêng của răng theo loại:
Loại 1: 300 - 350
Loại 2: 350 - 450
|
D |
l |
L |
|
3,0; 3,5 |
8 |
28 |
|
4,0; 4,5 |
10 |
32 |
|
5,0 |
12 |
36 |
Dao phay ngón đường kính 3,0 – 5,5mm được chế tạo có số răng 3 và 4.
+ Dao phay rãnh then chuôi trụ,mm:
|
D |
L |
l |
|
2,0 |
36 |
4 |
|
3,0 |
37 |
5 |
|
4,0 |
39 |
7 |
|
5,0 |
42 |
8 |
II.2.2. Phân tích lực tác dụng lên đầu dao
Hình 2.3: Phân tích lực tác dụng lên đầu dao
Tổng hợp lực R1 có thể được chia ra 2 thành phần: Lực vòng P (lực Pz) tác dụng theo tiếp tuyến của quỹ đạo chuyển động của lưỡi cắt và lực hướng kính Py.
Ngoài ra tổng hợp lực R1 có thể được chia ra: lực năm ngang Ph và lực thẳng đứng Pv. Nếu dao có rang xoắn (răng nghiêng) ngoài lực R1 tác dụng lên răng dao trong mặt phẳng vuông góc với trục dao, còn xuất hiện lực dọc trục P0, khi đó tổng hợp lực sẽ là R.
II.2.3. Xác định công suất và mômen xoắn trên trụ động cơ
Lực P là lực cần quan tâm nhất, vì nó thực hiện công việc chính để cắt phoi. Dựa theo lực này mà người ta tính ra công suất cắt và tính các chi tiết của cơ cấu chuyển động chính của máy. Lực hướng kính Py gây ra áp lực lên ổ bi của trục chính của máy và uốn võng trục dao. Dựa theo lực nằm ngang Ph (lực chạy dao). Người ta tính cơ cấu chuyển động chay dao và đồ gá kẹp phôi. Lực này có thể gây ra rung động khi giữa vít me - đai ốc có khe hở. Lực hướng kính Pv có xu hướng nâng phôi lên khỏi mặt bàn và nâng bàn máy lên khỏi thân máy.
Để tính lực Pz ta dựa vào giáo trình “ Sổ tay công nghệ chế tạo máy”
- Vật liêu gia công : nhôm
- Chọn độ sâu phay: t = 2mm
- Chọn lượng chạy dao răng: Sz = (0,18 – 0,15)(mm/răng).
- Chiều rộng phay: B = 3mm
II.2.3.1. Công suất và mômen xoắn của động cơ khi gia công với dao có đường kính nhỏ nhất
* Thông số dao:
-Đường kính : D1 = 2(mm)
- Số răng dao : Z1 = 3 (răng)
- Dao không gắn mảnh hợp kim cứng.
* Vận tốc cắt:
Vận tốc cắt được xác định theo công thức:
V1= (m/ph)
Trong đó :
Cv : hệ số xét đến vật liệu gia công và điều kiện khi tính vận tốc cắt.
D1 : đường kính dao phay.
T1 : tuổi bền trung bình của dụng cụ cắt.
t : chiều sâu phay.
Sz : lượng chay dao.
B : chiều rộng phay.
Z1 : số lượng răng dao.
Kv : hệ số hiệu chuẩn chung về lực cắt.
qv; m ; yv ; uv ; pv ; xv : các hệ số mũ khi tính tốc độ phay.
Ta tính tốc độ cắt khi vật liệu gia công là thép Carbon xây dựng
= 75kg/mm2.
Theo bảng (1-5) :
Cv = 46,7 ; qv = 0,45 ; xv = 0,5 ; yv = 0,5 ; uv = 0,1 ; pv = 0,1 ; m = 0,33
Theo bảng (2-5):
T1 = 60 (phút)
Theo bảng (2-1) trang 15:
Kmv = = = 1
Theo bảng (7-1) trang 17:
Knv = 0,8
Theo bảng (8-1) trang 17:
Kuv = 1,4
Kv = Kmv. Knv. Kuv = 1.0,8.1,4 = 1,12
Ta có:
V1 = = 24,75 (m/phút).
Số vòng quay trong 1 phút của dao :
N1 = = = 3941 (vòng/phút)
Tốc độ quay này là rất lớm so với thực tế chế tạo, vì vậy ta chọn tốc độ quay của động cơ là: ntt1 = 1500(vòng/phút)
Vậy tốc độ thực tế lúc này sẽ là:
Vt1 = = = 9,42 (m/phút).
Lượng chạy dao phút và lượng chay dao răng thực tế :
SM1 = Sz bảng.Z1.ntt1 = 0,18.3.1500 = 810 (mm/phút)
Chọn SM1 = 810 ( mm/phút )
Sz1 = = = 0.18 (mm/răng).
Các giá trị trên được tính cho gia công phôi là thép carbon.Với yêu cầu của đồ án này ta có thể áp dụng các giá trị tính toán trên cho kế quả gia công với vật liệu là nhôm.
* Lực cắt P1:
Lực cắt P1’ khi cắt thép cacbon được tính theo công thức:
P1’ = (KG)
Trong đó:
Cp : hệ số xét đến điều kiện nhất định đến lực cắt.
xp; yp; up; qp; p : hệ số mũ.
kp : hệ số hiệu chỉnh chung về lực cắt.
Theo bảng (3-5) trang 122:
Cp = 68,2; xp = 0,86; yp = 0,72; up = 1,0; ựp = 0; qp = 0,86
Theo bảng (12-1) trang 21:
Kp = Kmp = ()0,3 = ()0,3 = 1
P1’ = = 119(KG)
Giá trị trên tính cho gia công khi phôi là thép cacbon, khi phôi là nhôm thì gia trị trên đuợc nhân với hệ số 0,25.
P1 = P1’.0,25 = 119.0,25 = 29,75 (KG).
P1 = 291,55 (N)
* Công xuất cắt khi phay.
Nc1 = = = 45,8(W).
* Mômen xắn:
Mc1 = = = 0,29(N.m)
II.2.3.2. Công suất và mômen xoắn của động cơ khi gia công với dao có đường kính lớn nhất
** Thông số dao:
-Đường kính : D2 = 5(mm)
- Số răng dao : Z2 = 4 (răng)
- Dao không gắn mảnh hợp kim cứng.
* Vận tốc cắt:
Vận tốc cắt được xác định theo công thức:
V2= (m/ph)
Ta tính tốc độ cắt khi vật liệu gia công là thép Carbon xây dựng
= 75kg/mm2.
Theo bảng (1-5) :
Cv = 46,7 ; qv = 0,45 ; xv = 0,5 ; yv = 0,5 ; uv = 0,1 ; pv = 0,1 ; m = 0,33
Theo bảng (2-5):
T2 = 60 (phút)
Theo bảng (2-1) trang 15:
Kmv = = = 1
Theo bảng (7-1) trang 17:
Knv = 0,8
Theo bảng (8-1) trang 17:
Kuv = 1,4
Kv = Kmv. Knv. Kuv = 1.0,8.1,4 = 1,12
Ta có:
V2 = = 36,33 (m/phút).
Số vòng quay trong 1 phút của dao :
N2 = = = 2314 (vòng/phút)
Tốc độ quay này là rất lớm so với thực tế chế tạo, vì vậy ta chọn tốc độ quay của động cơ là: ntt2 = 1500(vòng/phút)
Vậy tốc độ thực tế lúc này sẽ là:
Vt2 = = = 23,55 (m/phút).
Lượng chạy dao phút và lượng chay dao răng thực tế :
SM2 = Sz bảng.Z2.ntt2 = 0,18.4.1500 = 1080 (mm/phút)
Chọn SM2 = 1080 ( mm/phút )
Sz2 = = = 0.18 (mm/răng).
Các giá trị trên được tính cho gia công phôi là thép carbon.Với yêu cầu của đồ án này ta có thể áp dụng các giá trị tính toán trên cho kế quả gia công với vật liệu là nhôm.
* Lực cắt P2:
Lực cắt P2’ khi cắt thép cacbon được tính theo công thức:
P2’ = (KG)
Theo bảng (3-5) trang 122:
Cp = 68,2; xp = 0,86; yp = 0,72; up = 1,0; ựp = 0; qp = 0,86
Theo bảng (12-1) trang 21:
Kp = Kmp = ()0,3 = ()0,3 = 1
P2’ = = 108,3(KG)
Giá trị trên tính cho gia công khi phôi là thép cacbon, khi phôi là nhôm thì gia trị trên đuợc nhân với hệ số 0,25.
P2 = P2’.0,25 = 108,3.0,25 = 27 (KG).
P2 = 264,6 (N)
* Công xuất cắt khi phay.
Nc2 = = = 104(W).
* Mômen xắn:
Mc2 = = = 0,66(N.m)
Như vậy khi chọn động cơ ta phải chọn thoả mãn điều kiện sau:
- Công suất động cơ: NĐC ≥ NC2 = 104 (W)
- Môme mở máy : MĐC ≥ MC2 = 0,66 (N.m)
- Tốc độ quay: ndc = 1500(vòng/phút)
II.3. Chọn động cơ trục Z
Để chọn động cơ trụ Z, ta phải chọn khi mômen xoắn trên trục Z là lớn nhất ( hay lực dọc trục là lớn nhất ). Khi đấy ta có thể coi máy làm việc như ở chế độ khoan.
II.3. 1. Lực chiều trục khi khoan
Hình 2.4:Lực chiều trục khi khoan
P0 = Cp.Dzp.Syp.Kmp (KG)
Trong đó:
Cp : hệ số đối với lực chiêu trục xét đến điều kiện cắt nhất định.
D : đường kính dao.
S : lượng chạy dao khi khoan.
Kmp = KmM : hệ số hiệu chỉnh khi tính chất cơ lý của vật liệu khác với điều kiện đang xét.
zp; yp : chỉ số mũ xét đến ảnh hưởng của đương kính dao, lượng chạy dao.
Ta thấy lực P0 tỷ lệ thuận với đường kính dao D, vì vậy ta chọn dao có đường kính lớn nhất để tính.
* chọn dao: - Đường kính dao: D = 5mm
- Số răng dao : Z = 4 (răng)
Theo bảng (7-3):
Cp = 31,5; zp = 1; yp = 0,8
Theo bảng (12-1) và (13-1):
Kmp = KmM = ()0,75 = ()0,75 = 1
Theo bảng ( 8-3) chọn bước tiến dao:
S = 0,31 (mm/vòng)
P0 = 31,5.51.0,310,8.1 = 61,7(KG)
P0 = 604,66 (N).
II.3.2. Công suất động cơ trục Z
Hình 2.5:Lực động cơ lên trục z
- Tổng khối lượng động cơ đầu cắt và bàn mang đầu cắt : mz = 2(kg).
Trọng lực ấn đầu dao xuông:
Pmz = mz.g = 2.9.8 = 19,6 (N)
Tổng hợp lực tác dụng lên vitme trục Z:
Z = P0 - Pmz = 604,66 -19,6 = 585,06 (N)
Vitme trục Z có đường kính dz = 10mm; bước ren qz = 3mm.
az = arctg() = 8,50
Z1 = Z.cos8,50 = 585,06.cos8,50 = 578,63 (N)
Z2 = Z.sin8,50 = 585,06.sin8,50 = 86,48 (N)
Z3 = Z2.cos8,50 = 86,48.cos8,50 = 85,53 (N)
Chọn hệ số ma sát trục vít me là: msz = 0,1
Fmsz = Z1.msz = 578,63.0.1 = 57,863 (N)
Lực ma sát chiếu theo phương vuông góc với trục vitme:
F’msz = Fmsz.cos8,50 = 57,863.cos8,50 = 57,23 (N)
Hợp lực tác dụng lên vitme theo phương vuông góc là:
Z’ = Z3 + F’msz = 85,53 + 57,23 = 142,76(N)
Mômen xoắn tác dụng lên vitme ( trục động cơ ):Do dùng bộ chuyền khớp nối, tỷ số chuyền uz = 1.
MDCZ = = = 0,714 (N.m).
Tốc độ quay truc Z lớn nhất :
nz = tốc độ dịch chuyển lớn nhất/qz = 800/3(v/ph)
Tốc độ quay động cơ trục Z:
ndcz = nz.uz = 266,67 (vòng/phút)
Vận tốc động cơ:
dcz = = = 27,9(rad/s)
Công suất động cơ trục Z:
NDCZ =
Trong đó: dcz : hiệu suất động cơ ( chọn dcz = 0,95)
Kz : hệ số quá tải cho phép ( Kz = 1,3 – 1,5 )
Chọn Kz = 1,5.
z = knz.obz.vmz
Theo giáo trình “ tính toán thiết kế hệ thống dẫn động cơ khí”- Trịnh Chất – Lê Văn Uyển.Bảng (2.3)
knz : hiệu suất khớp nối. Chọn knz = 1
obz : hiệu suất ổ bi. Chọn obz = 0,99
vmz: hiệu suất vít me. Chọn vmz = 0,99
z = 1.0,99.0,99 = 0,98
NDCZ = = 32,1 (W)
II.4. Chọn động cơ trục Y
* Sơ đồ lực tác dụng lên thanh trượt:
Hình 2.6:Lực động cơ lên trục y
- Tổng khối lượng trụ Z: m’z = 3(kg)
- Hê số ma sát thanh trượt: tty = 0,1
- Hệ số ma sát của vít me: vmy = 0,1
Lực ma sát tác dụnglên thanh trượt:
Ftty = Pmy.tty = mz.g.tty = 3.9,8.0.1 = 2,94 (N)
Để tính chọn công suất động cơ trục Y, ta tính chọn khi lực tác dụng lên đầu dao theo phương Y là lớn nhất.
Các thành phần lực cắt theo phương X, Y được xác định theo tỷ lệ đối với lực cắt vòng P.
- Phay nghịch:
Py = (0,6 – 0,8)P; Ph = (1,1 – 1,2)P; Pv = (0,2 – 0,3)P
- Phay thuận:
Py = (0,6 – 0,8)P; Ph = (0,8 – 0,9)P; Pv = (0,75 – 0,8)P
Vì quá trình gia công ở đây là cắt đứt hay tạo rãnh trên phôi nên quá trình phay ở đây là phay thuận, ta có:
PX = PY = Ph = ( 0,8 – 0,9)P
Chọn Ph = 0,9P với P = Pmax = P1 = 291,55(N)
PX = PY = Ph = 0,9.291,55 = 262,4(N)
Hợp lực tác dụng dọc trục vitme:
Y = PY + Ftty = 262,4 + 2,94 = 265,34(N)
* Sơ đồ lực tác dụng lên vitme:;
Hình 2.7:Lực động cơ lên trục vit me
Tương tự trục Z:
-Vítme có đường kính dy = 16mm; bước ren qy = 15mm.
ay = arctg() = 250
Y1 = Y.cos250 = 265,34.cos250 = 240,5(N)
Y2 = Y.sin250 = 265,34.sin250 = 112,14(N)
Y3 = Y2.cos250 = 112,14.cos250 = 101,6(N)
- Lực ma sát tác dụng lên vítme:
Fvmy = Y1.vmy = 240,5.0,1 = 24,05(N)
Lực ma sát chiếu lên phương vuông góc với trục vitme:
F’vmy = Fvmy.cos250 = 24,05.cos250 = 21,8(N)
Tổng hợp lực tác dụng lên vitme theo phương vuông góc với trục vitme:
Y’ = Y3 + F’vmy = 101,6 + 21,8 = 123,4(N)
Mômen xoăn tác dụng lên trục vitme :
My = = = 0,9872 (N.m)
Chọn tỷ số truyền đai trục y là: uy = = 1,5.
Mô men xoắn trên trục động cơ:
MĐCY = = = 0,658 (N.m)
Công suất động cơ trục Y:
NDCY =
Trong đó: dcy : hiệu suất động cơ ( chọn dcy = 0,95)
Ky : hệ số quá tải cho phép ( Ky = 1,3 – 1,5 )
Chọn Ky = 1,5.
y = dy.oby.vmy
Theo giáo trình “ tính toán thiết kế hệ thống dẫn động cơ khí”- Trịnh Chất – Lê Văn Uyển.Bảng (2.3)
dy : hiệu suất bộ truyền đai. Chọn dy = 0,96
oby : hiệu suất ổ bi. Chọn oby = 0,99
vmy: hiệu suất vít me. Chọn vmy = 0,99
y = 0,96.0,99.0,99 = 0,94
Tốc độ quay trục Y lớn nhất :
ny = tốc độ dịch chuyển lớn nhất/qy = 1000/15(v/ph)
Tốc độ quay động cơ trục Y:
ndcy = ny.uy = = 100(vòng/phút)
Vận tốc động cơ:
dcy = = = 10,47(rad/s)
Công suất động cơ trục Y:
NDCY = = 11,57 (W)
II.5. Chọn động cơ trục X
* Sơ đồ lực tác dụng lên thanh trượt:
Hình 2.8:Lực động cơ lên trục x
- Khối lượng trục Y và 2 thanh đứng: my = 7(kg)
Tổng khôi lượng trục Z, trục Y và 2 thanh đứng tác dụng lên thanh trượt X là: mx = 3 + 7 = 10(kg)
- Hê số ma sát thanh trượt: ttx = 0,1
- Hệ số ma sát của vít me: vmx = 0,1
Lực ma sát tác dụng lên thanh trượt:
Fttx = Pmx.ttx = mx.g.ttx = 10.9,8.0.1 = 9,8 (N)
Hợp lực tác dụng lên trục vítme trục X:
X = PX + Fttx = 262,4 + 9,8 = 274,2(N)
* Sơ đồ lực tác dụng lên vitme:
Hình 2.9:Lực động cơ lên trục vitme
Tương tự trục Z:
-Vítme có đường kính dx = 15mm; bước ren qx = 20mm.
ax = arctg() = 36,70
X1 = X.cos36,70 = 274,2.cos36,70 = 219,85(N)
X2 = X.sin36,70 = 274,2.sin36,70 = 163,87(N)
X3 = X2.cos36,70 = 163,87.cos36,70 = 131,4(N)
- Lực ma sát tác dụng lên vítme:
Fvmx = X1.vmx = 219,85.0,1 = 21,985(N)
Lực ma sát chiếu lên phương vuông góc với trục vitme:
F’vmx = Fvmx.cos36,70 = 21,985.cos36,70 = 17,63(N)
Tổng hợp lực tác dụng lên vitme theo phương vuông góc với trục vitme:
X’ = X3 + F’vmx = 131,4 + 17,63 = 149,03(N)
Mômen xoăn tác dụng lên trục vitme :
Mx = = = 1,12 (N.m)
Chọn tỷ số truyền đai trục là: ux = = 2
Mômen xoắn trên trục động cơ:
MĐCX = = = 0,56 (N.m)
Công suất động cơ trục X:
NDCX =
Trong đó: dcx : hiệu suất động cơ ( chọn dcx = 0,95)
Kx : hệ số quá tải cho phép ( Kx = 1,3 – 1,5 ). Chọn Kx = 1,5.
x = dx.obx.vmx
Theo giáo trình “ tính toán thiết kế hệ thống dẫn động cơ khí”- Trịnh Chất – Lê Văn Uyển.Bảng (2.3)
dx : hiệu suất bộ truyền đai. Chọn dx = 0,96
obx : hiệu suất ổ bi. Chọn obx = 0,99
vmx: hiệu suất vít me. Chọn vmx = 0,99
x = 0,96.0,99.0,99 = 0,94
Tốc độ quay trục X lớn nhất :
nx = tốc độ dịch chuyển lớn nhất/qx = 1000/20(v/ph)
Tốc độ quay của động cơ truc X:
ndcx = nx.ux = = 100(vòng/phút)
Vận tốc động cơ:
dcx = = = 10,47(rad/s)
Công suất động cơ trục X:
NDCX = = 9,85 (W)
* Bảng thông số về công suất và mômen động cơ sử dụng:
|
Trục |
Loại động cơ |
Công xuất(W) |
Mômen xoắn(N.m) |
|
Đầu căt |
DC |
104 |
0,66 |
|
Trục Z |
DC |
32,1 |
0,714 |
|
Trục Y |
DC |
11,57 |
0,658 |
|
Trục X |
DC |
9,85 |
0,56 |
Sau khi tính toán ta chọn được các loại động cơ là:
+ Đông cơ DC:- nguồn vào 230V
- Công suất 135W
- Tốc độ tối đa 1500(vg/ph)
II.6. Tính toán thiết kế bộ truyền động
Để tính toán, thiết kế bộ truyền động ta dựa trên giáo trình “ Tính toán thiết kế hệ thống dẫn động”- Trịnh Chất - Lê Văn Uyển.
II.6.1. Bộ truyền động trục Z
Máy CNC được thiết kế là loại 2,5D và nguyên công gia công chỉ là cắt và tạo rãnh trên phôi. Vì vậy để đơn giản cho việc chế tạo và lắp ráp, chúng em chấp nhận sai số lớn hơn ở trục Z và sử dụng khớp nối trục là khớp đàn hồi với đĩa hình sao để nối trục động cơ và vitme.
- Mômen xoắn trên trục động cơ là:
Mdc = MDCZ = 0,714(N.m)
Dựa vào bảng (16-11)trang70 giáo trình “tính toán thiết kế hệ thống dẫn động” chọn khớp có các thông số sau:
|
T(N.m) |
nmax(vg/ph) |
d |
d2 |
D |
D1 |
L |
|
2,5 |
6500 |
6 |
20 |
32 |
30 |
45,5 |
Hình 2.10:trục động cơ
- Độ lệch tâm cho phép: Dr = 0,2mm.
- Độ lệch góc cho phép: Da = 1030’.
* Kiểm tra ứng suất dập sinh ra trên đĩa:
dd = £ [d]d
Theo bảng (16-1) trang 58: k = 2
d0 = 1,2d = 1,2.6 = 7,2
Z : số răng đĩa đàn hồi.Z = 6.
h: độ dày đĩa. h = 5.
dd = = 3,95.10-3 (MPa)
Vì khớp nối làm việc với tốc độ khoảng 1750vòng/phút
nên [d]d = 2(MPa).
dd = 3,95.10-3 (MPa) £ [d]d = 2(MPa)
Khớp nối đủ an toàn với ứng suất dập.
* Kiểm tra mômen xoắn:
Ta có: Tt = k.T £ [T]
Với: Tt : mômen xoắn tính toán.
k : hệ số chế độ làm việc. Theo bảng (16-1) ta có k = 2.
T : Mômen xoắn danh định,
T = MDCZ = 0,714 (N.m)
Tt = 2.0,714 = 1,428 (N.m)
Mà [T] = 2,5 (N.m)
Tt< [T] Khớp nối an toàn.
II.6. 2. Bộ truyền động trục Y
Trục X, Y dùng để điều khiển chạy dao cắt theo biên dạng mong muốn. Vì vậy cần điều khiển chính xác về vị trí và tốc độ. Để làm được như vậy ta cần sử dụng bộ truyền có độ chính xác cao, mômen lớn. Với yêu cầu trên và cũng để đơn giản cho việc lắp ráp, chế tạo ta sử dụng bộ truyền động đai răng.
Đai răng là loại đai dẹt được chế tạo thành vòng kín, có răng ở mặt trong khi vào tiếp xúc với bánh đai, các răng của đai sẽ ắn khớp với các răng trên bánh đai. Do tiếp xúc bằng ăn khớp, truyền động đai răng có những ưu điểm sau: không có trượt, tỉ số truyền lớn (u≤12), hiệu suất cao, không cần lực căng ban đầu lớn, lực tác dụng lên trục và ổ nhỏ. Đai răng được chế tạo bằng cao su trộn với nhựa natric hoặc được đúc từ cao su poliuretan. Lớp chịu tải chủ yếu là dây thép, sợi thuỷ tinh hoặc sợi poliamit.
Hình 2.11:Bộ truyền động trục Y
II.6. 2.1. Xác định môdun và chiều rộng đai
+ Môdun được xác định theo công thức:
my = 35
Trong đó:
Py: Công suất trên bánh đai chủ động (kW)
ndcy: Số vòng quay trên bánh đai chủ động(vòng/phut)
Py = NDCY = 11,57 (W) = 11,57.10-3 (kW)
ndcy = 100(vòng/phút)
my = 35. = 1,7
Chọn my = 2
Chiều rộng đai:
by = d.my
Trong đó: d = 6 ¸ 9 là hệ số chiều rộng đai.
Chọn d = 8
by = 8.2= 16(mm)
Theo bảng (4.28) chọn by = 16(mm)
II.6. 2.2. Xác định thông số bộ truyền đai
Tỷ số truyền uy = = 1,5
Theo bảng (4.29) chọn số răng của bánh đai nhỏ:
Z1y = 18(răng)
Số răng của bánh đai lớn:
Z2y = Z1y.uy = 18.1,5 = 27 (răng)
+ Khoảng cách trục ay:
Ta có: aymin£ ay£ aymax
Với:
aymin = 0,5.my(Z1y + Z2y) + 2my = 0,5.2(18 + 27) + 2.2 = 49 (mm)
aymax = 2my(Z1y + Z2y) = 2.2(18 + 27) = 180 (mm)
Chọn ay = 80(mm)
+ Số răng đai zdy:
zdy = + +
Với py là bước đai. Theo bảng (4.27) chọn py = 6,28.
zdy = + + = 48(răng)
Theo bảng (4.30) chọn zdy = 50 (răng) và chiều dài đai răng ldy=314(mm)
Từ chiều dài đai răng ta xác định lại khoảng cách trục:
a’y =
Trong đó:
= = 172,7
= = 9
Thay số ta được:
a’y = = 85,88(mm)
- Đường kính chia của các bánh đai:
d1y = my.Z1y = 2.18 = 36(mm)
d2y = my.Z2y = 2.27 = 54 (mm).
- Đường kính ngoài của bánh đai:
da1y = my.Z1y - 2
Với khoảng cách từ đáy răng đến đường trung bình của lớp chịu tải. Theo bảng 4.27 ta có = 0,6.
da1y = my.Z1y - 2 = 2.18 - 2.0,6 = 34,8(mm)
da2y = my.Z2y - 2. = 2.27 - 2.0,6 = 52,8(mm)
- Số răng đồng thời ăn khớp trên bánh đai nhỏ:
Za1y =
Với là góc ôm trên bánh đai nhỏ
= = =1680
Za1y = = 8,4(răng)
Vậy Za1y = 8,4 > 6 thoả mãn điều kiện về số răng ăn khớp.
II.6. 2.3. Kiểm nghiệm đai về lực vòng riêng
Lưc vòng riêng trên đai phải thoả mãn điều kiện:
Trong đó: Fty: lực vòng(N)
qmy: khối lượng 1m đai có chiều rộng 1mm
Kdy: hệ số tải trọng động
vy: vận tốc vòng(m/s)
Ta có: Fty =
Với: NDCY = 11,57(W) = 11,57.10-3 (kW)
vy = = = 0,1884 (m/s)
Fty = = 61,41(N)
Theo bảng (4.31) ta có: qmy = 0,0032(kg)
Theo bảng (4.7) ta có: Kdy = 1,1
(N/mm)
Ta có: [qy] = [q0].Cz.Cu
Trong đó: [q0]: lực vòng riêng cho phép. Theo bảng (4.31) chọn [q0]=5(N/mm)
Cz:hệ số kể đến ảnh hưởng của số răng đồng thời ăn khơp.
Ta có: Z0 = 6 Cz =1
Cu: hệ số xét đến ảnh hưởng của chuyển động tăng tốc.
u = Cu = 0,95
[qy] = [q0].Cz.Cu = 5.1.0,95 = 4,75(N/mm)
Vậy ta có: qy = 4,22(N/mm) < [qy] = 4,75(N/mm)
Vậy đai đủ an toàn với lực vòng.
* Bảng thông số đai răng trục Y:
|
Thông số |
Ký hiệu |
Giá trị |
|
Môdun ăn khớp |
my |
2 |
|
Số răng |
Z1y Z2y |
18(răng) 27(răng) |
|
Đường kính đỉnh răng |
da1y da2y |
34,8(mm) 52,8(mm) |
|
Chiều cao răng |
hy = 0,9my |
1.8(mm) |
|
Đường kính vòng chia |
d1y d2y |
36(mm) 54(mm) |
|
Chiều dài răng |
By=by+my |
18(mm) |
|
Chiều rộng nhỏ nhất của rãnh |
Sy |
1,8(mm) |
|
Chiều sâu rãnh |
hy |
2,2(mm) |
|
Góc profin rãnh |
500 |
|
|
Bán kính góc lượn |
r1y=r2y |
0,5(mm) |
|
Số răng trên đai |
Zdy |
50(răng) |
|
Chiều dài đai |
ldy |
314(mm) |
|
Khoảng cách trục |
ay |
85,88(mm) |
II.6. 3. Bộ truyền động trục X
Hình 2.12:Bộ truyền động trục x
II.6. 3.1. Xác định môdun và chiều rộng đai
+ Môdun được xác định theo công thức:
mx = 35
Trong đó: Px: Công suất trên bánh đai chủ động (kW)
ndcx: Số vòng quay trên bánh đai chủ động(vòng/phut)
Px = NDCX = 9,85 (W) = 9,85.10-3 (kW)
ndcx = 100(vòng/phút)
mx = 35. = 1,6
Chọn mx = 2
Chiều rộng đai:
bx = d.mx
Trong đó: d = 6 ¸ 9 là hệ số chiều rộng đai.
Chọn d = 8
bx = 8.2= 16(mm)
Theo bảng (4.28) chọn bx = 16(mm)
II.6. 3.2. Xác định thông số bộ truyền đai
Tỷ số truyền ux = = 2
Theo bảng (4.29) chọn số răng của bánh đai nhỏ:
Z1x = 18(răng)
Số răng của bánh đai lớn:
Z2x = Z1x.ux = 18.2 = 36 (răng)
+ Khoảng cách trục ax:
Ta có: axmin£ ax£ axmax
Với:
axmin = 0,5.mx(Z1x + Z2x) + 2mx = 0,5.2(18 + 36) + 2.2 = 58 (mm)
axmax = 2mx(Z1x + Z2x) = 2.2(18 + 36) = 216 (mm)
Chọn ax = 100(mm)
+ Số răng đai zdx:
zdx = + +
Với px là bước đai. Theo bảng (4.27) chọn px = 6,28.
zdx = + + = 59,3(răng)
Theo bảng (4.30) chọn zdx = 56 (răng) và chiều dài đai răng ldx=351,7(mm)
Từ chiều dài đai răng ta xác định lại khoảng cách trục:
a’x =
Trong đó:
= = 182,14
= = 18
Thay số ta được: a’x = = 89,25(mm)
- Đường kính chia của các bánh đai:
d1x = mx.Z1x = 2.18 = 36(mm)
d2x = mx.Z2x = 2.36 = 72 (mm).
- Đường kính ngoài của bánh đai: da1x = mx.Z1x - 2
Với khoảng cách từ đáy răng đến đường trung bình của lớp chịu tải. Theo bảng 4.27 ta có = 0,6.
da1x = mx.Z1x - 2 = 2.18 - 2.0,6 = 34,8(mm)
da2x = mx.Z2x - 2. = 2.36 - 2.0,6 = 70,8(mm)
- Số răng đồng thời ăn khớp trên bánh đai nhỏ:
Za1x =
Với là góc ôm trên bánh đai nhỏ
= = =1570
Za1x = = 7,85(răng)
Vậy Za1x = 7,82 > 6 thoả mãn điều kiện về số răng ăn khớp.
II.6. 3.3. Kiểm nghiệm đai về lực vòng riêng
Lưc vòng riêng trên đai phải thoả mãn điều kiện:
Trong đó: Ftx: lực vòng(N)
qmx: khối lượng 1m đai có chiều rộng 1mm
Kdx: hệ số tải trọng động
vx: vận tốc vòng(m/s)
Ta có: Ftx =
Với: NDCX = 9,85(W) = 9,85.10-3 (kW)
vx = = = 0,1884 (m/s)
Ftx = = 52,3(N)
Theo bảng (4.31) ta có: qmx = 0,0032(kg)
Theo bảng (4.7) ta có: Kdx = 1,1
(N/mm)
- Ta có: [qx] = [q0].Cz.Cu
Trong đó: [q0]: lực vòng riêng cho phép. Theo bảng (4.31) chọn [q0]=5(N/mm)
Cz:hệ số kể đến ảnh hưởng của số răng đồng thời ăn khơp.
Ta có: Z0 = 6 Cz = 1
Cu: hệ số xét đến ảnh hưởng của chuyển động tăng tốc.
u = Cu = 0,9
[qx] = [q0].Cz.Cu = 5.1.0,9 = 4,5(N/mm)
Vậy ta có: qx = 3,6(N/mm) < [qx] = 4,5(N/mm) Vậy đai đủ an toàn với lực vòng.
Bảng thông số đai răng trục X:
|
Thông số |
Ký hiệu |
Giá trị |
|
Môdun ăn khớp |
mx |
2 |
|
Số răng |
Z1x Z2x |
18(răng) 36(răng) |
|
Đường kính đỉnh răng |
da1x da2x |
34,8(mm) 70,8(mm) |
|
Chiều cao răng |
hx = 0,9mx |
1.8(mm) |
|
Đường kính vòng chia |
d1x d2x |
36(mm) 72(mm) |
|
Chiều dài răng |
Bx=bx+mx |
18(mm) |
|
Chiều rộng nhỏ nhất của rãnh |
Sx |
1,8(mm) |
|
Chiều sâu rãnh |
h’x |
2,2(mm) |
|
Góc profin rãnh |
500 |
|
|
Bán kính góc lượn |
r1x=r2x |
0,5(mm) |
|
Số răng trên đai |
Zdx |
56(răng) |
|
Chiều dài đai |
ldx |
351,7(mm) |
|
Khoảng cách trục |
a’x |
89,25(mm) |
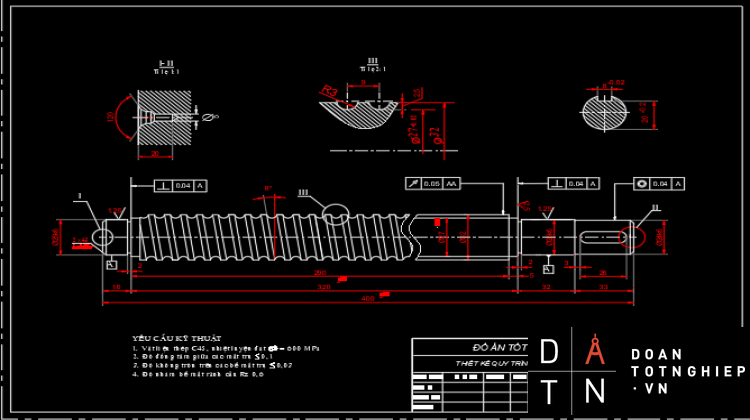
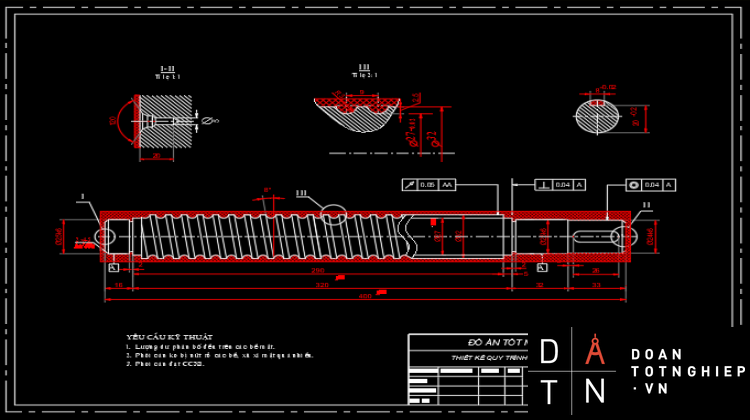
II.7. Kiểm nghiện độ bền trục vít me
Vítme trục Z là vítme có đường kính nhỏ nhất và chịu lực dọc trục lớn nhất.Vì vậy trục vítme trục Z là trục mất an toàn nhất, nên khi kiểm nghiện về độ bền ta chỉ cần kiểm nghiệm trục vítme trục Z.
- Tải trọng riêng dọc trục được xác định theo công thức:
qa = (MPa)
Trong đó:
Fa : Lực dọc trục. Fa = Z = 585,06(N)
Zb : Số bi trên các vòng ren làm việc.
Với: Dtb:đường kính vòng tròn qua các tâm chia.Dtb = 9(mm)
K: số vòng ren làm việc.K = 2.
db: đường kính bi.db = 2(mm)
= 27,26.
Chọn Zb = 27( bi)
: hệ số phân bố không đều tải trọng cho các viên bi. Chọn = 0,8
qa = = 6,8(MPa)
Dựa vào đồ thị (8.10) lấy ứng suất lớn nhất =2300(MPa).
Trị số trên phải thoả mãn điều kiện: []
Vì trục vít me đã được tôi hoá bề măt nên [] 5000(MPa)
Vậy trục vítme an toàn.
*THIẾT KẾ MẠCH ĐIỀU KHIỂN
Nhiệm vụ cần làm
* Thiết kế chế tạo mạch
Thiết kế, chế tạo mạch điều khiển công suất.
Thiết kế chế tạo mạch điều khiển trung tâm.
Hình 3.1: Sơ đồ khối
Chức năng của từng khối
1. KHỐI PC
Là giao diện giữa người và máy.Khối này có các nhiệm vụ sau.
- Soạn thảo chương trình gia công, quản lý xuất nhập chương trình gia công dưới dạng file text.
- Truyền lệnh gia công xuống máy CNC, nhậ các tín hiệu phản hồi và hiển thị chúng bằng hình ảnh.
- Mô phỏng được quá trình thực hiện gia công bằng hình ảnh
2. KHỐI ĐIỀU KHIỂN TRUNG TÂM
Sử dụng vi điều khiển dspic 30f4011. Khối này có nhiệm vụ sau
- Nhận lệnh từ máy tính
- Thực hiện chương trình nội suy tuyến tính, nội suy đường tròn
- Cấp tín hiệu điều khiển, nhận tín hiệu từ khối mạch công suất
- Thực hiện chương trình để máy CNC có thể phân biệt mã lênh gcode từ trên máy tính truyền xuống
3. KHỐI MẠCH CÔNG SUẤT
- Nhận tín hiệu điều khiển từ khối điều khiển trung tâm để điều khiển ba động cơ
- Nhận tín hiệu điều khiển từ khối điều khiển trung tâm để điều khiển đầu cắt đóng mở
- Nhận tín hiệu từ công tắc hành trình đưa tín hiệu về cho khối điều khiển trung tâm xử lý
Sơ đồ khối mạch công suất:
|
Cổng giao tiếp với mạchđiều khiển trung tâm |
|
Khối đệm tín hiệu |
|
Tạo xung lôgic điều khiển các cuộn dây |
|
Động cơ |
|
Công tắc hành trình |
|
Dừng máy khẩn cấp |
|
Khối khuếch đại công suất |
|
Bật tắt động cơ trục chính |
Hình 3.2: Ta có sơ đồ khối mạch công suất:
4.KHỐI NGUỒN
4.1 Khối nguồn 5V
Để mạch hoạt động được, ta cần có một nguồn cung cấp 5V ổn định. Và hầu hết các mạch lôgíc số và các bộ xử lý đều cần một nguồn cung cấp 5V. Nhưng thường thì ta chỉ có sẵn các nguồn có mức điện áp khoảng 9VDC đến 24VDC. Vì vậy để tạo ra một nguồn cung cấp 5V, ta dùng IC ( Integrated Circuit ) ổn áp LM7805. Sơ đồ mạch được thiết kế như sau:
Hình 3.3: Khối nguồn 5V
Dùng 7805 là một cách đơn giản và dễ thực hiện, ta chỉ việc nối đầu dương của nguồn áp thay đổi (bất kỳ từ 9VDC đến 24VDC) đến chân đầu vào (chân ký hiệu bằng chữ I hay số 1). Nối đầu âm tới chân chung (ký hiệu bằng chữ C hay số 2) và sau đó khi mở nguồn, ta sẽ có 1 nguồn áp 5V trên chân ra O (hay số 3). Đôi khi đầu dây cấp nguồn bị nhiễu, để san phẳng những nhiễu này và có đầu ra 5V tốt hơn, ta mắc thêm tụ điện song song ở đầu vào và đầu ra của 7805. Ta sử dụng tụ điện 1000uF 50V mắc ở đầu vào và 10uF 25V ở đầu ra.
Vì nguồn đầu vào dùng chung với nguồn công suất 24VDC, nguồn đầu ra là 5VDC, dòng ra định mức là 1A, như vậy ta có công xuất tiêu tán trên 7805 là:
Ptt = (Vin - Vout).I = (24 - 5).1 = 19(W).
Với công suất tiêu tán này, khi hoạt động lâu 7805 sẽ sinh ra nhiệt lớn, vì vậy ta cần giảm công suất tiêu tán trên 7805 bằng cách mắc thêm ở đầu vào 7805 nối tiếp một điên trở. Ta sử dụng điện trở 4,7ôm.
Công suất của điện trở: Pdt = I2.R = 12.4,7 = 4,7(W).
Vậy ta sử dụng điện trở 4,7R5W.
Khi đó điện áp rơi trên điện trở là : Vdt = I.R = 1.4,7 = 4,7(V).
Khi đó công suất tiêu tán trên 7805 sẽ còn:
P’tt = ( Vin - Vdt - Vout ).I = (24 - 4,7 - 5 ).1 = 14,3(W).
Trong mạch thi công ta chọn loại UA7805, có dòng định mức 1A ( đây là loại IC ổn áp loại chân Ground nằm giữa, áp ra 5V±5%, dòng tải 1A).
Linh kiện thay thế: UA7805C, UA7805CKC, UA7805CU, A7805UC...(sổ tay tra cứu [ECG master replacement guide_2002 Edition] số hiệu linh kiện thay thế ECG960).
4.2. Khối nguồn 12V
Vì khối công suất làm việc với dòng điện lớn các linh kiện ở khối này sẽ sinh ra nhiệt lớn vì vậy cần phải gắn tản nhiệt và quạt gió, và cũng để đóng mở relay bật tắt động cơ đầu cắt nên ta cần tạo ra khối nguồn 12VDC. Để đơn giản ta sử dụng IC LM7812, sơ đồ mạch và chức năng các chân tương tự LM7805.
Hình 3.4: Khối nguồn 12V
Trong quá trình sử dụng, chúng ta rất dễ mắc phải sai phạm đấu ngược nguồn đầu vào (âm nguồn đấu vào đầu dương và ngược lại). Vì vậy để đảm bảo an toàn cho mạch và các linh kiện, đầu vào của 7805 và 7812 ta mắc thêm Diode để chống dòng ngược.
4.3. Khối nguồn 24V
Nguồn này được cung cấp bởi một bộ nguồn có sẵn 24VDC10A.
Ta có sơ đồ nguyên lý mạch nguồn cho mạch công suất:
Hình 3.5: Khối nguồn 24V
5. KHỐI GIAO TIẾP MÁY TÍNH VÀ MẠCH ĐIỀU KHIỂN TRUNG TÂM
Trong quá trình thiết kế, chúng em đã đưa ra 2 phương án điều khiển là sử dụng 1 phần mềm chuyện dụng KCam4 hoặc Mach3 và sử dụng chương trình tự viết.
Phần mềm KCam4 và Mach3 điều khiển trực tiếp trục động cơ thông qua mạch công suất. Các tín hiệu điều khiển được đưa qua cổng LPT. Chương trình tự viết được nạp sẵn vào vi điều khiển dsPIC, thông qua mạch điều khiển trung tâm đưa tín hiệu điều khiển xuống mach công suất để điều khiển động cơ. Để đơn giản trong quá trình sử dụng và thiết kế, ta sử dụng luôn cổng LPT để kết nối giữa mạch điều khiển trung tâm và mạch công suất.
6. KHỐI ĐỆM TÍN HIỆU
Tín hiệu qua lại giữa mạch điều khiển và mạch công suất có thể bị hao tổn trên đường truyền. Và cũng để bảo vệ máy tính và vi điều khiển tránh được dòng ngược từ khối công suất chạy về, có thể gây cháy nổ và hỏng hóc. Chúng ta sử dụng thêm bộ đệm.
Bộ đệm mà ta sử dụng là IC 74ls245. Để tránh nhiễu cho IC ta mắc thêm tụ lọc nhiễu 100nF ở đầu vào Vcc của IC. Tụ này sẽ được đặt gần sát chân IC 74ls245 trên board mạch. Ngoài ra, chúng ta có thể sử dụng bộ đệm là IC 74lc244.
Hình 3.6. Độ đếm tín hiệu
7. KHỐI BẬT TẮT ĐẦU CẮT
Động cơ đầu cắt ta sử dụng là loại động cơ sử dụng nguồn 220VAC, vì vậy để bật tắt đầu cắt ta sử dụng relay. Để đóng mở relay ta sử dụng mosfet irfz44n, mosfet này sẽ được giới thiệu kỹ hơn ở khối công suất.
Hình 3.7: Khối bật tắt đầu cắt
8. KHỐI CÔNG SUẤT
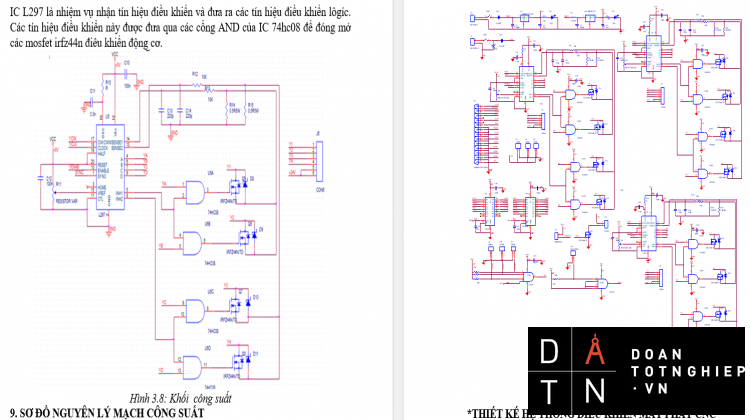
Khối này có tác dụng nhận tín hiệu điều khiển từ máy tính (bao gồm: xung clock, chiều, và tín hiệu cho phép) sao đó tạo nên các xung lôgíc để điều khiển động cơ, các tín hiệu này được đưa qua các mosfet để tăng công suất điều khiển. Khối này bao gồm IC L297 là nhiệm vụ nhận tín hiệu điều khiển và đưa ra các tín hiệu điều khiển lôgíc. Các tín hiệu điều khiển này được đưa qua các cổng AND của IC 74hc08 để đóng mở các mosfet irfz44n điêu khiển động cơ.
Hình 3.8: Khối công suất
9. SƠ ĐỒ NGUYÊN LÝ MẠCH CÔNG SUẤT
Hình 3.9: Sơ đồ nguyên lý
*THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN MÁY PHAY CNC
- Mô hình trục chuyển động quay
Chuyển động quay là chuyển động của trục chính gồm động cơ 1 chiều, hộp số và trục mang tải. Mô hình động lực học của trục này được biểu diễn trên hình 2.
Hình 4.1. Mô hình động lực học của trục quay
Giả thiết là hệ thống dẫn động có độ cứng vững cao, và mô men cản tỉ lệ với tốc độ góc, thì ta sẽ có các phương trình động lực học như sau :
(1) (2) (3) (4) và (5)
Hàm truyền phần điện của động cơ được đơn giản hóa do hằng số thời gian τ nhỏ :
(6)
Với R – điện trở thuần của rô to, Ktlà hằng số mô men kéo của động cơ, τ – hằng số thời gian của mạch điện.
Hệ thống điều khiển servo cho trục chính này có dang như trên hình 3 với Mc là tác động nhiễu.
Hình 4.2. Hệ thống điều khiển tốc độ dưới tác động nhiễu Mc
Hàm truyền của thiết bị điều khiển : (7)
Hàm truyền của hệ thống với đầu vào thứ nhất là :
(8)
Hàm truyền của hệ thống với đầu vào thứ hai (nhiễu):
(9)
Tốc đô của trục mang tải :
(10)
2.Phương trình động lực học của trục này được biểu diễn.
(11)
(12)
(13)
(14)
(15)
Tương tự như phần trên ta có hàm truyền của phần cơ khí:
(16)
Hình 4.3. Hệ thống điều khiển servo tốc độ của trục tịnh tiến
Vận tốc trên đầu ra của hệ này được xác định như sau:
(17)
Trong đó:
(18)
= (19)
Thông thường trong các hệ thống điều khiển số, tác động của nhiễu được xem là rất nhỏ và không được quan tâm. Nhưng thực tế trong bài toán máy này ta thấy nhiễu ở đây chính là lực cắt. Tuy nhiên tác động này chỉ có ảnh hưởng trong thời gian rất ngắn khi chuyển từ trạng thái chưa cắt sang trạnh thái cắt. Đáp ứng trên đầu ra là tốc độ có bị ảnh hưởng nhưng sau đó sẽ ổn định đến tốc độ yêu cầu vì ta sử dụng bộ điều khiển PID có khả năng chống nhiễu rất tốt.
3. Đánh giá tính ổn định và chất lượng của hệ thống điều khiển
Hình4. 5. Đáp ứng của hệ truyền động khi tín hiệu là hình nấc và hình sin.
Hình 4. 6. Đáp ứng của hệ dùngPID khi tín hiệu là hàm xung và hàm tuyến tính.
Hình 4.7. Đáp ứng vị trí goc khi tín hiệu là hàm nấc.
Hình4.8. Mô phỏng tốc độ động cơ.
Động cơ điện một chiều điều khiển tốc độ có hàm truyền là hệ cấp 1 dạng 0. Chính vì vậy thiết bị điều khiển PID sử dụng trong trường hợp này là điều kiện để đảm bảo độ chính xác cao nhất. Do hệ thống điều khiển ở trường hợp này chỉ là hệ cấp 2, nên hệ luôn ổn định, duy chỉ chú ý là đáp ứng của hệ thống là hàm dao động hay không mà thôi. Khi điều chỉnh các hệ số tỉ lệ Kp, hệ số tích phân KI và hệ số vi phân KD theo phương pháp Ziegler – Nichols ta sẽ thu được hệ với tốc độ đáp ứng yêu cầu và có thể giảm hay loại bỏ hẳn tác động của dao động. Ta quan tâm duy nhất đến sai số điều khiển, trong trường hợp này là sai số tốc độ:
(20)
Khi hàm vào là hàm bậc thang đơn vị, thì sai lệch tĩnh sẽ bằng 0, tức là không có sai số về tốc độ.
Tương tự như vậy cho trục tịnh tiến sai số tốc độ điều khiển cũng sẽ tiến tới 0. Như vậy tốc độ điều khiển sẽ đáp ứng được yêu cầu về độ chính xác.
4. Mô phỏng gia công
Đây là bước quan trọng để người lập trình tìm ra lỗi và có hướng chỉnh sửa.
Phần mềm gia công
Điều khiển trục z lên xuống và điểm xét O
Chỉnh tốc độ vòng quay và trục ngang
Chỉnh trục x ,y
KẾT LUẬN
Vấn đề quan trọng nhất trong thiết kế máy phay CNC là xây dựng được mô hình động lực học của máy, tính toán công suất động cơ và thiết kế hệ thống điều khiển. Với mô hình toán học đã được xây dựng ta có thể mô phỏng và đánh giá chất lượng của máy trên cơ sở tính toán và thiết kế tuy nhiên trên cơ sở dã được tính toán phải kể đến phần kiểm nghiệm thực tế và độ chính xác gia công phần cơ khí của máy đó cũng là hướng phát triển và hạn chế của bài báo.
KẾT LUẬN CHUNG
Trên cơ sở nghiên cứu tổng quan về máy phay CNC MINI. Kết quả nghiên cứu của đề tài như sau:
- Nêu được tổng quan về phay CNC, về bộ điều khiển
- Mô tả cụ thể hệ thống phay CNC
- Thiết kế mạch điều khiển cho hệ thống.
- Xây dựng hoàn chỉnh các hàm điều khiển tối ưu cho hệ thống.
- Hoàn thành chương trình điều khiển cho hệ thống .
- Thiết kế mô phỏng mô hình hệ thống thang máy và kiểm chứng kết quả.
Tựu chung lại luận văn đã đưa ra hướng giải quyết cho bài toán điều khiển
Tuy nhiên do đề tài "Nghiên cứu và thiết kế máy phay CNC" có phạm vi nghiên cứu khá rộng, trình độ của tác giả còn hạn chế và thời gian thực hiện ngắn nên đề tài sẽ không tránh khỏi những sai sót.