LUẬN VĂN THẠC SĨ NGHIÊN CỨU, THIẾT KẾ VÀ CHẾ TẠO CẢM BIẾN 6 TRỤC: LỰC – MÔ MEN

NỘI DUNG ĐỒ ÁN
NGHIÊN CỨU, THIẾT KẾ VÀ CHẾ TẠO CẢM BIẾN 6 TRỤC: LỰC – MÔ MEN
TÓM TẮT
Hiện nay, giá thành cảm biến lực - mô men trên thị trường ngoài nước rất đắt, nên khó có khả năng được sử dụng trong các sản phẩm cơ điện tử sản xuất tại Việt Nam. Vì lý do trên, việc nghiên cứu chế tạo thử nghiệm cảm biến lực – mô men tại Việt Nam là cần thiết nhằm hướng đến việc chế tạo các sản phẩm cobot (Cooperative Robot) tại Việt Nam trong tương lai. Trong đề tài này, nhóm nghiên cứu những kỹ thuật cho phép chế tạo các loại cảm biến lực và cảm biến mô-men bằng straingages. Nhóm cũng tiến hành nghiên cứu chế tạo mạch khuếch đại tín hiệu điện áp đo được từ straingages.
1.Mục tiêu:
Nghiên cứu chế tạo cảm biến đo lực và cảm biến đo mô-men với các yêu cầu kỹ thuật sau:
- Cảm biến đo lực cho phép đo lực tác dụng theo 1 trục với biên độ lực lên tới
- Cảm biến đo mô-men xoắn cho phép đo mô-men tác dụng theo 1 trục với độ
lớn lên tới 15N.m.
- Thiết kế của các cảm biến này phải bảo đảm tính nhỏ gọn, khối lượng thấp, cho phép gắn lên các thiết bị bộ xương ngoài hay cánh tay robot công nghiệp
- Kết quả nghiên cứu:
Sau hơn 1 năm nghiên cứu, nhóm đã đạt được một số kết quả nhất định sau:
- Thiết kế chế tạo thành công cảm biến đo lực cho phép đo một lực tác dụng thẳng lên tới 50N.
- Thiết kế chế tạo thành công cảm biến đo mô-men xoắn với độ lớn của mô-men
tác dụng tối đa lên tới 20 N.m.
- Đã chế tạo cảm biến đo lực – mô men 6 trục. Nhóm đang tiến hành thực nghiệm để kiểm chứng tính tuyến tính của cảm biến.
- Sản phẩm:
- Cảm biến đo lực, mômen 1 trục.
- Mạch khuếch đại tín hiệu cảm biến lực – mômen.
- Bài báo đăng trên “Tạp chí Cơ Khí Việt Nam”.
ABSTRACT
Nowsaday, the price of a multi axis force/torque sensor is quite high and not very accessible to general public. However, these sensors remain irreplacable for the research and development of exoskeletons and other interactive robotic devices (such as cobot or force feedback devices), due to their compactness and high precision and repeativity. For this reason, the research on the design and the fabrications of force/torque sensors should be conducted so that they can be used in production of cobot or exoskeletons or in other research activities. We investigated the technique of building force/torque sensors using straingages. Voltage signal amplificators were also constructed to read and enregister straingages signals.
- Objective(s):
The design of the force and torque sensors must fit with following technical requirements:
- The force sensor allows the measurement of a single axis linear force with a maximum amplitude that can reach 50N.
- The torque sensor allows the measurement of a single axis torque with a maximum amplitude that can reach 15N.m.
- These devices must respect the compactness and low inertia constraints so that they cam be integrated into robot arms or exoskeletons.
- Researchresults:
After over a year of research and development, we have achieved followings accomplishments:
- Successful fabrication of a force sensor that can measure a linear force with a maximum amplitude of 50N.
- Successful fabrication of a torque sensor that can measure a single axis torque with a maximum amplitude of 20 N.m.
- We have finished the design and the fabrication of the prototype of a 6 axis force/torque sensor. Experiments are being conducted to validate the product.
- Products:
- Single axis force/torque sensors
- Voltage signal amplificator circuit.
- Paper on “Journal of Mechanical Engineering, 3/2015”
MỤC LỤC
Chương 1 1
TỔNG QUAN CHUNG VỀ LĨNH VỰC NGHIÊN CỨU......................................1
1.1. Tổng quan về hướng nghiên cứu ..................................................................1
1.2. Tổng kết các kết quả nghiên cứu ..................................................................2
1.2.1. Nghiên cứu ngoài nước ..........................................................................2
1.2.2. Nghiên cứu trong nước ..........................................................................3
1.2.3. Mục đích của đề tài ................................................................................3
1.3. Nhiệm vụ và phạm vi nghiên cứu .................................................................4
1.3.1. Nhiệm vụ ................................................................................................4
1.3.2. Phạm vi nghiên cứu................................................................................4
1.4. Phương pháp nghiên cứu ..............................................................................4
Chương 2 6
CƠ SỞ LÍ THUYẾT................................................................................................6
2.1. Kết cấu cơ khí của cảm biến đo lực – mô men bằng straingages .................6
2.1.1. Một số tính chất vật lý của strain gages .................................................6
2.1.1.1. Ảnh hưởng của nhiệt độ ..................................................................7
2.1.1.2. Bù trừ rão.........................................................................................7
2.1.1.3. Đáp ứng tần số.................................................................................7
2.1.1.4. Độ chính xác lặp lại .........................................................................8
2.1.2.2. Đầu đo bán dẫn :............................................................................10
2.2. Một số loại loadcell công nghiệp................................................................11
2.3. Nguyên lý đo biến dạng dùng mạch cầu wheatstone..................................12
2.3.1. Cảm biến lực ........................................................................................14
2.3.2. Cảm biến mô-men ................................................................................15
2.3.3. Cảm biến lực – mô men 6 trục .............................................................17
Chương 3 20
THIẾT KẾ CẢM BIẾN VÀ MÔ PHỎNG THÀNH PHẦN CHỊU BIẾN DẠNG CỦA CẢM BIẾN ..................................................................................................20
3.1. Vật liệu chế tạo ...........................................................................................20
3.1.1. Cảm biến lực ........................................................................................22
3.1.1.1. Mô hình CAD bộ thí nghiệm đo cảm biến lực ..............................22
3.1.1.2. Đặt các ràng buộc và tải ................................................................23
3.1.1.3. Chia lưới: Thiết lập mô hình phần tử hữu hạn (phần mềm sẽ giải trên từng phân tử nhỏ của chi tiết và đưa ra kết quả) .................................24
3.1.1.4. Phân tích và xuất kết quả...............................................................25
3.1.2. Cảm biến mô men 1 trục ......................................................................27
3.1.2.1. Mô hình CAD ................................................................................27
3.1.2.2. Đặt các ràng buộc và tải ................................................................28
3.1.2.3. Chia lưới (Mục 3.1.1.3) ................................................................29
3.1.2.4. Phân tích và xuất kết quả...............................................................30
3.1.3. Cảm biến 6 trục lực mô men ................................................................32
3.1.3.1. Kiểm tra theo mô men theo trục z .................................................33
3.1.3.2. Kiểm tra lực theo trục z .................................................................36
3.1.3.2.1. Đặt các ràng buộc và tải .........................................................36
3.1.3.2.2. Chia lưới .................................................................................37
3.1.3.2.3. Phân tích và xuất kết quả ........................................................37
3.1.3.3. Mô hình CAD của bộ kiểm tra mô men theo trục x,y ...................38
3.1.3.3.1. Điều kiện biên.........................................................................39
3.1.3.3.2. Tải ...........................................................................................39
3.1.3.3.3. Chia lưới .................................................................................40
3.1.3.3.4. Phân tích và xuất kết quả ........................................................40
3.1.3.4. Kiểm tra lực theo phương x...........................................................41
3.2. Mạch khuếch đại và xử lý tín hiệu cho cảm biến lực - mômen.................44
3.2.1. Phương pháp dán và bảo vệ straingages ..............................................44
3.2.2. Nguyên lý thiết kế mạch khuếch đại tín hiệu straingage .....................45
Chương 4 KẾT QUẢ THỰC NGHIỆM ....................................................47
4.1. Kiểm tra tính tuyến tính của cảm biến ........................................................48
4.2. Kết quả thực nghiệm...................................................................................48
Chương 5 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ................................54
TÀI LIỆU THAM KHẢO.........................................................................................55
PHỤ LỤC I: Các loại strain gages đo biến dạng và keo dán ..............................57
PHỤ LỤC II: Giấy xác nhận bài báo ........................................................................65
DANH SÁCH HÌNH ẢNH
Hình 1.1 Một số ứng dụng của cảm biến lực ..............................................................1
Hình 1-2. Cảm biến lực theo dõi lực tác dụng lên Bulông kẹp đường ray .................1
Hình 1-3. Cảm biến hai trục lực và momen theo phương z của FUTEK ...................2
Hình 1-4. Cảm biến ba trục lực theo ba phương x, y, z của FUTEK..........................3
Hình 2-1. Biên dạng chiều dài dây dưới tác dụng của ứng suất .................................6
Hình 2-2. Cấu tạo cảm biến áp điện trở kim loại dạng dán ........................................7
Hình 2-3. Biểu đồ ứng suất biến dạng của kim loại....................................................8
Hình 2-4. Cảm biến lực với thanh dầm chịu uốn ......................................................11
Hình 2-5. Cảm biến lực 2 SML 2 thanh dầm ............................................................12
Hình 2-6. Cảm biến lực dạng chữ S ..........................................................................12
Hình 2-7. Mạch cầu Wheatston.................................................................................13
Hình 2-8: Mẫu thiết kế cảm biến lực ........................................................................14
Hình 2-9 : Sơ đồ nối chân straingages của cảm biến lực ..........................................15
Hình 2-10 : Mẫu thiết kế cảm biến mômen ..............................................................16
Hình 2-11: Sơ đồ nối chân straingages của cảm biến mô-men.................................16
Hình 2-12: Mẫu thiết kế cảm biến lực – mômen 6 trục ............................................17
Hình 2-13: Sơ đồ vị trí dán straingages của cảm biến lực – mômen ........................18
Hình 3. 1: Thông số vật liệu sử dụng trong mô phỏng. ............................................20
Hình 3. 2: Quy trình thực hiện giải bài toán trong Ansys 12 ....................................21
Hình 3. 3: Bản vẽ chi tiết cảm biến lực dạng thanh dầm ..........................................22
Hình 3. 4: Mô hình 3D bộ thí nghiệm đo lực theo trục z ..........................................23
Hình 3. 5: Lực tác động vào cảm biến khi làm việc .................................................24
Hình 3. 6: kết quả chia lưới theo kích thước .............................................................25
Hình 3. 7: Độ biến dạng lớn nhất 0.038239mm........................................................25
Hình 3. 8: Độ giãn dài tương đối 0.021% ................................................................26
Hình 3. 9: Kết quả phân tích ứng suất.......................................................................26
Hình 3. 10: Mô hình 3D bộ thí nghiệm đo mô men của cảm biến mô men 1 trục ...27
Hình 3. 11: Bản vẽ chi tiết thân cảm biến mô men 1 trục.........................................28
Hình 3. 12: Ngẫu lực tác động lên cảm biến mô men 1 trục ....................................28
Hình 3. 13: Cố định cảm biến lên tấm đế..................................................................29
Hình 3. 14: Mô men lực tác dụng lên cảm biến theo phương quay quanh trục Z ....29
Hình 3. 15: Kết quả chia lưới ....................................................................................30
Hình 3. 16: Kết quả độ biến dạng .............................................................................30
Hình 3. 17: Độ giãn dài tương đối 0.0175% ............................................................31
Hình 3. 18: Ứng suất tối đa là 123.97Mpa ................................................................31
Hình 3. 19: Mô hình bộ thí nghiệm mô men theo trục z ...........................................32
Hình 3. 20: Mô hình bộ thí nghiệm lực theo trục z,và mô men theo trục x,y...........32
Hình 3. 21: Kết quả chia lưới ....................................................................................33
Hình 3. 22: Đặt tải là mô men lực lên cảm biến 6 trục 120000 N.mm .....................34
Hình 3. 23:Biến dạng lớn nhất 0.0423mm theo trục z ..............................................34
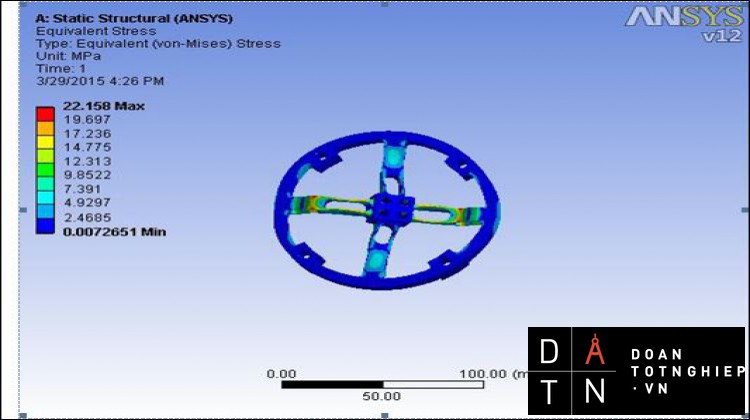
Hình 3. 24: Ứng suất lớn nhất 114.56 Mpa theo trục z.............................................35
Hình 3. 25: Độ giãn dài lớn nhất 0.00162 theo trục z ...............................................35
Hình 3. 26: Cảm biến 6 trục được gắn cố định vào tấm đế bằng 4 bulong M6 ........36
Hình 3. 27: Lực kéo 120N hướng trục z vuông góc với đế ......................................36
Hình 3. 28: Biến dạng lớn nhất 0.083mm của cảm biến 6 trục theo trục z...............37
Hình 3. 29: Kết quả độ giãn dài tương đối ................................................................37
Hình 3. 30: Kết quả ứng suất của cảm biến 6 trục theo trục z ..................................38
Hình 3. 31 Mô hình CAD cho bộ kiểm tra mô men theo trục x,y ............................39
Hình 3. 32: Đặt tải là mô men lực lên cảm biến 6 trục 120000 N.mm .....................40
Hình 3. 33: Độ giãn dài tương đối tối đa 0.206% .....................................................40
Hình 3. 34: ứng suất tối đa 146.21 Mpa....................................................................41
Hình 3. 35: Đặt tải tác dụng lực lên cảm biến theo phương trục x ...........................42
Hình 3. 36: Kết quả phân tích độ giãn dài khi tác động lực theo phương x .............42
Hình 3. 37: Kết quả phân tích ứng suất khi tác động lực theo phương x..................43
Hình 3. 38: Cố định straingage trên bề mặt cảm biến. ..............................................44
Hình 3. 39: Sản phẩm mạch khuếch đại tín hiệu straingage. ....................................45
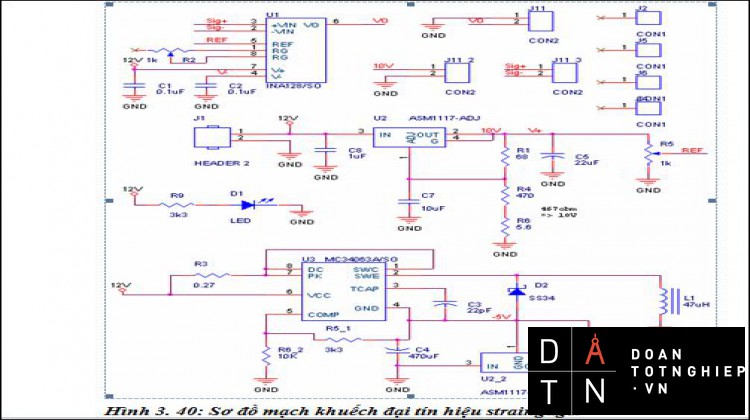
Hình 3. 40: Sơ đồ mạch khuếch đại tín hiệu straingage............................................46
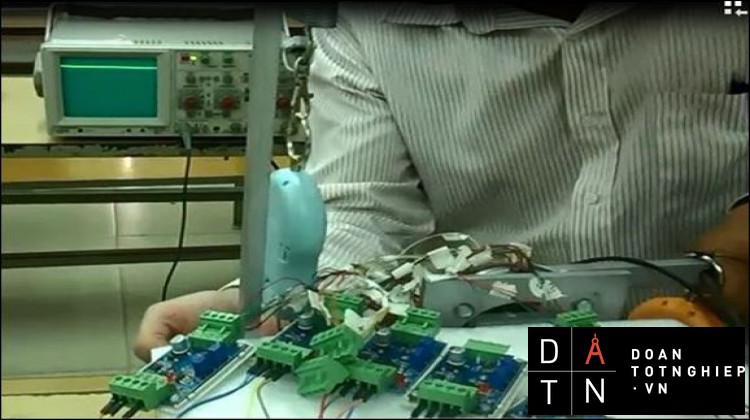
Hình 4. 2: Cảm biến lực và cảm biến mô-men đã được dán straingages..................47
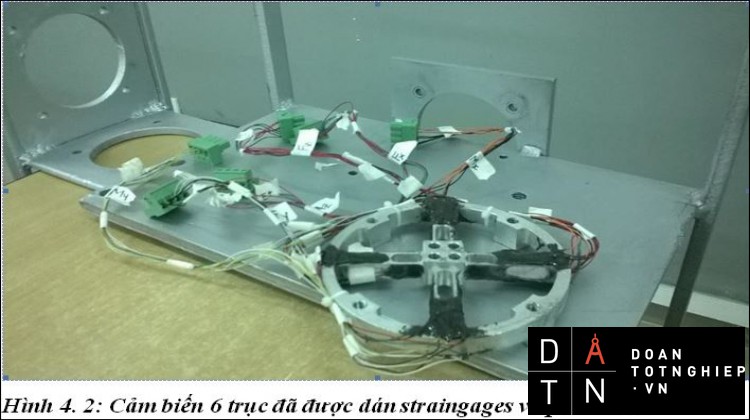
Hình 4. 3:Cảm biến 6 trục đã được dán straingages và phân mạch ..........................47
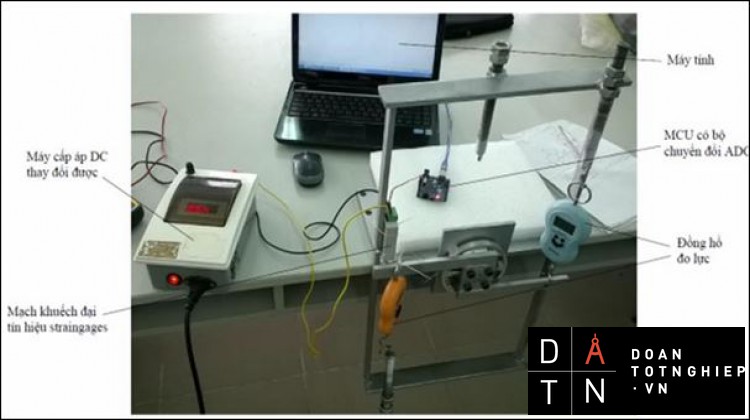
Hình 4. 4: Mô hình đo kiểm tra cảm biến lực ...........................................................49
Hình 4. 5:Mô hình thí nghiệm đo cảm biến mô-men. ...............................................49
Hình 4. 6:Mô hình đo kiểm tra cảm biến 6 trục lực mô men ....................................51
Hình 4. 7 Kết quả thí nghiệm đo cảm biến lực. ........................................................52
Hình 4. 8 : Kết quả thí nghiệm đo cảm biến mô-men. ..............................................53
Chương1
TỔNG QUAN CHUNG VỀ LĨNH VỰC NGHIÊN CỨU
1.1. Tổng quan về hướng nghiên cứu
Cảm biến có nhiều ứng dụng trong thực tế H1.1 thể hiện một số ứng dụng của nó.[4]
Kĩ thuật giao thông Kĩ thuật robot
Thí nghiệm, kiểm tra
Ứng dụng của
cảm biến
Điều khiển quá trình
Y sinh học Thiết bị đo
Hình 1. 1: Một số ứng dụng của cảm biến
Trong kĩ thuật giao thông, cảm biến lực được sử dụng chủ yếu để giám sát khả năng chịu lực của các công trình giao thông, giúp cho việc bảo trì sửa chữa được kịp thời, bảo đảm an toàn Hình 1.2
Hình 1.2. Cảm biến lực theo dõi lực tác dụng lên Bulông kẹp đường ray
Trong thí nghiệm vật liệu, cảm biến lực được sử dụng trong các máy kiểm tra bền vật liệu như máy kéo nén, máy kiểm tra độ cứng của lò xo, kiểm tra tải trọng của xích,.... Kết quả của các thí nghiệm này là biểu đồ ứng suất chuyển vị. Giá trị của ứng suất được đo bởi cảm biến lực.
Trong y sinh học, cảm biến lực được dùng để chẩn đoán khả năng cầm nắm, đi đứng của người sau tai nạn hoặc người già, từ đó đưa ra lời khuyên để họ thuận lợi hơn trong sinh hoạt hàng ngày.
Điều khiển quá trình: Các dây chuyền đóng gói sản phẩm cần có sự chính xác về khối lượng.
1.2. Tổng kết các kết quả nghiên cứu
1.2.1. Nghiên cứu ngoài nước
Trên thế giới, cảm biến đo lực, mô-men cũng như cảm biến lực-mô men 6 trục từ lâu đã được phát minh [11] và được thương mại hóa rộng rãi.
Do đặc thù của công nghệ về cảm biến đa trục nói chung, cảm biến 6 trục lực mô men nói riêng tất cả sản phẩm công nghệ này đều mang tính thương mại cao nên việc tìm các công bố khoa học liên quan tác giả gặp nhiều khó khăn trong tiếp cận lý thuyết để làm các thí nghiệm. Các sản phẩm load-cell của một số hãng sản xuất cũng đã có trên thị trường như Hình 1.3, Hình 1. 4.
số tác gỉả trên thế giới tự nghiên cứu chế tạo cảm biến đo lực, mô-men, đặc biệt là cảm biến đo lực-mô men 6 trục. để phục vụ cho các nghiên cứu của mình. Trong nghiên cứu này, tác giả trình bày các nghiên cứu về phương pháp thiết kế chế tạo cảm biến đo lực và mô-men xoắn bằng loại áp điện trở. Các sản phẩm này trong tương lai gần sẽ được sử dụng trong các sản phẩm robotics kế trên nhằm phục vụ chủ yếu cho các nghiên cứu khoa học trong lĩnh vực robotics tương tác.
Hình 1.3. Cảm biến hai trục lực và momen theo phương z của FUTEK
Hình 1. 4. Cảm biến ba trục lực theo ba phương x, y, z của FUTEK
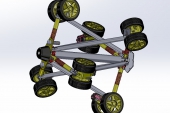
Hình 1. 5: Cảm biến lực- mô men 3 thanh dầm và 4 thanh dầm [13], [14]
1.2.2. Nghiên cứu trong nước
Qua khảo sát, tác giả nhận thấy có một số công trình nghiên cứu về việc đo lực và mô-men sử dụng đầu đo điện trở như của PTS Lê Kiều Nhi thực hiện tại sở khoa học và công nghệ TPHCM. Tác giả tìm thấy rất ít các công bồ đăng trên các tạp chí trong nước về lĩnh vực thiết kế chế tạo cảm biến đo lực và mô-men xoắn sử dụng đầu đo điện trở, đặc biệt là các cảm biến cở nhỏ sử dụng cho các loại robot công nghiệp hoặc trong lĩnh vực y sinh.
1.2.3. Mục đích của đề tài
Hiện nay, giá thành cảm biến lực – mô men trên thị trường rất đắt, nên khó có khả năng được sử dụng trong các sản phẩm cơ điện tử sản xuất tại Việt Nam.
Vì vậy việc nghiên cứu chế tạo thử nghiệm cảm biến lực – mô men 6 trục là cần thiết nhằm hướng đến việc chế tạo các sản phẩm phục vụ trong công nghệ tự động tại Việt Nam trong tương lai.
1.3. Nhiệm vụ và phạm vi nghiên cứu
1.3.1. Nhiệm vụ
a. Chế tạo thử nghiệm cảm biến đo lực, đo mô men, cảm biến đo lực-mô men đa kênh với vật liệu là hợp kim nhôm A5025.
b. Thiết kế và gia công chế tạo phần cơ khí của cảm biến. Cảm biến được thiết kế tương tự như nguyên lý của load cell, với một cấu trúc cơ khí được dán strain gages. Số lượng strain gages sử dụng cần thiết phải lớn hơn 6 để cho phép xác định đầy đủ 6 thành phần của vec-tơ lực mô men.
c. Lọc và khuếch đại tín hiệu, lấy mẫu tín hiệu từ các strain gages.
d. Thiết kế chế tạo các cơ cấu cho phép truyền từng thành phần lực và mô men riêng biệt lên cảm biến. Các công cụ này sẽ phục vụ cho các thực nghiệm nhằm xác định ma trận chuyển đổi vec-tơ điện áp của các strain gages thành 6 thành phần của vec-tơ lực – mô men.
1.3.2. Phạm vi nghiên cứu
a. Đề tài chỉ tính toán và tiến hành chế tạo, thử nghiệm cụm thiết bị gồm: cảm biến lực, cảm biến mômen và cảm biến đo 6 thành phần lực –mô men, bằng vật liệu là hợp kim nhôm A5025 và hai bộ thí nghiệm đo lực và mô men.
b. Đề tài không đi giải quyết bài toán mà chỉ thực hiện một số thí nghiệm đo thực nghiệm để đánh giá độ tuyến tính của kết quả đo được. Để đánh giá toàn diện hiệu quả và tìm ra các thông số tối ưu của cảm biến 6 trục lực-mô men, tác giả cần nhiều thời gian hơn nữa để nghiên cứu thiết bị và trang bị thêm dụng cụ đo kiểm thí nghiệm.
1.4. Phương pháp nghiên cứu
khứ.
a. Phương pháp kế thừa: sử dụng kết quả của các nghiên cứu trong quá
b. Phương pháp mô phỏng số bằng phần mềm Ansys để kiểm tra độ bền
của cảm biến, từ đó xác định giới hạn lực lớn nhất mà cảm biến có thể đo được.
- Phuong phap th\l"c nghi m, so sanh dS xac djnh tuang quan gia tri 1\l"c di;it va gia tri tra vs cua cam biiln.
Chương2
CƠ SỞ LÍ THUYẾT
2.1. Kết cấu cơ khí của cảm biến đo lực – mô men bằng straingages
2.1.1. Một số tính chất vật lý của strain gages
Các kết quả thực nghiệm cũng như lý thuyết vật lý đều chứng minh được rằng điện trở của một dây dẫn sẽ tăng nếu như dây bị kéo giãn. Hình 2. 1 mô tả sự biến dạng của một sợi dây dẫn (chiều dài L1, dường kính D1). Dưới tác dụng của lực kéo giãn chiều dài và đường kính dây sẽ trở thành L2 và D2 nhằm bảo toàn thể tích của dây. Một dây dẫn có đường kính càng nhỏ sẽ có đại lượng điện trở/chiều dài càng lớn và ngược lại.
Hình 2. 1. Biên dạng chiều dài dây dưới tác dụng của ứng suất
Với tính chất vật lý trên, nếu như chúng ta có thể dán chặt một mảnh dây dẫn lên trên một bề mặt một vật liệu có khả năng biến dạng, ta sẽ có khả năng sử dụng sự biến thiên của điện trở dây dẫn để đo sự biến dạng của mảnh vật liệu khi có một ngoại lực tác động lên nó. Một ví dụ thiết kế dây dẫn được thể hiện trong Hình 2. 2. Lưới dây có phương theo chiều ngang. Chiều của lưới dây được đặt cùng với hướng của tải trọng lớn nhất trên bề mặt vật liệu. Hai điểm cuối của lưới dây được để hở bên ngoài nhằm nối dây để đưa tín hiệu điện áp của straingage ra bên ngoài.
- Thân chịu lực c. Đầu nối
- Thành phần điện trở d. Chiều dài lưới làm việc
Hình 2. 2: Cấu tạo cảm biến áp điện trở kim loại dạng dán
Lưới dây được chế tạo trên một tấm phim Mylar mỏng và dán lên bề mặt cảm biến theo phương thích hợp để đo lực tác dụng. Straingage này có một số đặc tính như sau:
2.1.1.1. Ảnh hưởng của nhiệt độ
Do straingage được gắn trực tiếp lên bề mặt cảm biến bởi một lớp keo epoxy mỏng, nó chịu ảnh hưởng bởi sự thay đổi nhiệt độ của vật liệu cảm biến, với thời gian đáp ứng thường tương đối nhanh. Các dây dẫn trên strain gage có thể được thiết kế để bù trừ sự biến thiên của mô-đun đàn hồi của vật liệu theo nhiệt độ.
2.1.1.2. Bù trừ rão
Rão là sự gia tăng biến dạng, xảy ra khi một vật liệu được giữ liên tục ở một ứng suất không đổi. Trong thực tế, nhà sản xuất có thể thiết kế lưới strain gage với độ rão tương ứng với độ rão của vật liệu cảm biến nhằm bù trừ hiệu ứng rão. Các cảm biến lực công nghiệp có thông số độ rão vào khoảng dưới ±0.025 % của tải tác dụng liên tục trong 20 phút.
2.1.1.3. Đáp ứng tần số
Do khối lượng của strain gage rất nhỏ, gần bằng zê-rô, nên đáp ứng tần số của một cảm biến lực sử dụng straingage sẽ chỉ phụ thuộc vào đáp ứng của kết cấu cảm biến, cơ cấu kết nối cũng như băng tần của mạch khuếch đại điện áp.
2.1.1.4. Độ chính xác lặp lại
Theo lý thuyết, cảm biến lực sử dụng strain gage luôn có độ chính xác lặp lại tốt vì khi straingage được dán chặt vào bề mặt cảm biến sẽ tạo nên một cấu trúc nguyên khối. Nguyên nhân chính tạo nên tính không lặp lại của cảm biến đến chủ yếu từ các kết cấu cơ học bên ngoài được liên kết với cảm biến.
2.1.1.5. Độ phân giải
Ưu điểm lớn nhất của straingage khi được dùng để đo độ biến dạng là nó có độ phân giải vô cùng, vì bất kì sự thay đổi nhỏ nào về độ biến dạng đều sẽ tạo nên một sự thay đổi của giá trị điện trở straingage. Độ phân giải của cảm biến do đó chỉ phụ thuộc vào hệ thống bo mạch điện tử (độ phân giải của hệ thống lấy mẫu) được sử dụng để lấy giá trị điện áp của cầu straingage.
2.1.2. Nguyên lý thiết kế chế tạo cảm biến sử dụng straingages
Nguyên lý thiết kế một cảm biến lực, mô men được dựa trên độ biến dạng đàn hồi của vật liệu cơ khí như H2.3
Hình 2. 3: Biểu đồ ứng suất biến dạng của kim loại
Sơ đồ biến dạng của kim loại: Do đường đồ thị ứng suất – biến dạng của kim loại luôn gần như tuyến tính khi ứng suất nhỏ hơn giới hạn đàn hồi, sự thay đổi của giá trị điện trở của các strain gages dán chặt trên bề mặt vật liệu kim loại cần đo theo
lực tác động từ bên ngoài lên cảm biến cũng gần như tuyến tính. Bằng cách đánh giá sự thay đổi giá trị điện trở của các strain gages trên cảm biến, ta có thể tính gần đúng vec-tơ lực hay mômen tác dụng lên cảm biến(thiết bị cần kiểm tra) và làm biến dạng các strain gages.
Phạm vi biến dạng có thể đo được của các strain gages với độ chính xác ~
0.1% là khoảng từ ±10-5 đến ±2.10-1. Giới hạn bị hạn chế bởi nhiễu của cảm biến và của mạch điện. Trong trường hợp tổng quát, đầu đo là một lưới làm bằng dây dẫn có điện trở suất ρ, tiết diện s và chiều dài nℓ (ℓ là chiều dài của một đoạn dây, n là số đoạn dây). Thường thì n = 10 ÷ 20 đối với đầu đo kim loại và n = 1 đối với đầu đo bán dẫn.
Cảm biến được cố định trên đế cách điện (làm bằng giấy hoặc chất dẻo), còn đế thì được gắn vào cấu trúc nghiên cứu. Kết quả là cảm biến cũng chịu biến dạng
như biến dạng của cấu trúc. Điện trở của cảm biến được biểu diễn bởi biểu thức:
R l
S
Trong đó: R – là điện trở (Ω)
ρ – điện trở suất (Ω.m)
l – chiều dài thành phần điện trở (m)
s – tiết diện thành phần điện trở (m2)
Do chịu ảnh hưởng của biến dạng nên điện trở của cảm biến thay đổi đi một lượng ∆R, nghĩa là:
Biến dạng dọc của dây kéo theo sự thay đổi kích thước theo chiều ngang a, b
(nếu mặt cắt của dây hình chữ nhật) hoặc d (nếu dây có tiết diện tròn). Với một hệ số tỉ lệ v, quan hệ giữa biến dạng ngang và biến dạng dọc theo định luật:
Trong đó v là hệ số Poisson. Trong vùng biến dạng đàn hồi v 0,3. Vì tiết
diện của dây S = ab hoặc S = d2/4 nên:
Hiện nay chúng ta sử dụng phổ biến hai loại đầu đo: đầu đo kim loại và đầu
đo bán dẫn. Hai loại này khác nhau ở tỷ số .
2.1.2.1. Đầu đo kim loại
Đối với đầu đo kim loại, mối quan hệ Bridman dẫn đến hệ thức điện trở suất và sự thay đổi thể tích như sau:
Trong đó C là hằng số Bridman. V là thể tích dây. Vì V = Sn nên :
Với K là hệ số đầu đo và được viết bởi biểu thức:
K (1 2v) C(1 2v)
Vì v 0,3 và C 1 nên đầu đo kim loại thường có K2.
2.1.2.2. Đầu đo bán dẫn :
Đối với đầu đo bán dẫn, sự phụ thuộc của điện trở suất vào ứng lực được
biểu diễn bởi biểu thức:
......................
Chương 5 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
Sau thời gian thực hiện đề tài “Nghiên cứu, Thiết kế và chế tạo cảm biến cảm biến 6 trục lực mô men”, Tác giả đã hoàn thành mục tiêu đã đề ra. đã nghiên cứu chế tạo thành công các cảm biến đo lực và cảm biến đo mô-men 1 trục.
Cảm biến 6 trục lực- mô men đang được đo kiểm tra về độ ổn định, độ chống nhiễu và tìm nguyên nhân không tuyến tính theo phương x,y để cho kết quả tốt nhất.
Kết quả mô phỏng và kết quả thực nghiệm bước đầu đều cho thấy các sản phẩm này đạt yêu cầu (về độ bền, về độ biến dạng tối đa hay về tính tuyến tính).
Tuy nhiên do hạn chế về trang thiết bị đo kiểm tra, giới hạn về thời gian nên kết quả đo thực nghiệm tuy nhiều nhưng chưa được như mong muốn tốt nhất.
Hướng đề xuất trong tương lai cần trang bị thiết bị đo thực nghiệm chuẩn và chính xác hơn để giảm thiểu sai số trong quá trình đo lặp lại lực và mô men lực từ bên ngoài lên các cảm biến và hoàn thiện kết quả của cảm biến 6 trục lực mô men.
TÀI LIỆU THAM KHẢO
TIẾNG VIỆT
|
[1] |
Nguyễn Khắc Xương, Vật Liệu Kim Loại Màu, Nhà xuất bản khoa học và kỹ
thuật, 2003. |
|
[2] |
Đặng Việt Cương, Sức Bền Vật Liệu (Toàn Tập), Nhà xuất bản khoa học và kỹ
thuật, 2008. |
|
[3] |
Lê Hưng Duy, Huỳnh Xuân Bình, Trần Thanh Hải Tùng, Nghiên cứu chế tạo bộ đo mômen xoắn dùng cảm biến biến dạng kết hợp với trục xoắn, Tuyển tập Báo cáo Hội nghị Sinh viên Nghiên cứu Khoa học lần thứ 7, Đại học Đà Nẵng, |
|
[4] |
. Lê Văn Doanh,Phạm Thượng Hàn, Nguyễn Văn Hòa, Võ Thạch Sơn, Đào Văn Tân, "Các bộ cảm biến trong kỹ thuật đo lường và điều khiển," Nhà xuất bản khoa học và kỹ thuật, 2006. |
|
[5] |
Ngô Diên Tập, Đo lường và điều khiển bằng máy tính, Nhà xuất bản khoa học
và kỹ thuật, 2004. |
|
[6] |
Nguyễn Văn Hòa, Bùi Đăng Thảnh, Hoàng Sỹ Hồng, Giáo trình đo lường điện
và cảm biến đo lường, Nhà xuất bản Giáo dục, 2005. |
|
[7] |
Lê Kiều Nhi, "Thiết kế và chế tạo thiết bị đo biến dạng đa kênh điều khiển bằng chương trình số (giao tiếp vi tính), Đề tài nghiên cứu cấp thành phố," Sở Khoa học và Công Nghệ TPHCM, 1999. |
|
[8] |
Tập 1, Nhà xuất bản khoa học và kỹ thuật, 2004. |
|
[9] |
tp.hcm, 2013. |
|
[10] |
TIẾNG NƯỚC NGOÀI |
|
[11] |
|
|
[12] |
] G. S. Kim, H. J. Shin, J. Yoon, Development of 6 axis force/moment sensor for a humanoid robot’s intelligent foot, Sensors and Actuators, pages 276-281, Elsevier, 2008. |
|
[13] |
Platform KHR-2 (KAIST Humanoid Robot-2), Department of Mechanical
Engineering, Korea Advanced Institute of Science and Technology , 2003. |
|
[14] |
|
|
[15] |
Synopsis, Design of Biped Robot AAU-BOT1, AALBORG UNIVERSITET,
|